技术特征:
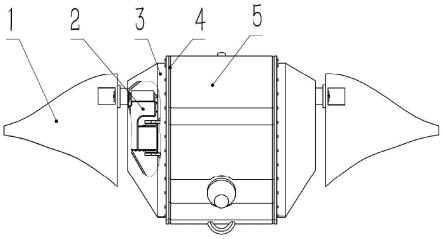
1.一种蝠鲼式仿生鱼,包括基体部件(5)和胸鳍(1),其特征在于,所述胸鳍(1)通过体积可变的过渡部件(3)对称设置在基体部件(5)两侧,过渡部件为过渡板(31)和柔性蒙皮(32)组成的密闭空腔结构,空腔内充有油液并设有控制胸鳍(1)运动的驱动机构(2);所述基体部件(5)的中间隔板(52)上安装有控制系统(53)和浮力调节机构(54),浮力调节机构(54)通过控制过渡部件(3)内的油量,改变过渡部件(3)中柔性蒙皮(32)的体积,进而改变仿生鱼所受的浮力。2.根据权利要求1所述蝠鲼式仿生鱼,其特征在于,所述驱动机构(2)包括阶梯轴垫片(21)、控制胸鳍(1)摇翼的第一舵机(22)、控制胸鳍(1)拍翼的第二舵机(24)、舵机连接架(23)和u型支架(25),第一舵机(22)的舵盘通过阶梯轴垫片(21)与胸鳍(1)连接,第二舵机(24)的舵盘端安装在过渡板(31)的一对支架(34)上,第二舵机(24)的舵盘与支架(34)的安装孔同轴线设置。3.根据权利要求2所述蝠鲼式仿生鱼,其特征在于,所述浮力调节机构(54)包括蠕动泵(541)、常闭电磁阀(542)、体积可变的油囊(543)、蠕动泵控制板(544)、流量传感器(546)和连接上述部件的油管组件(545),形成控制过渡部件(3)和油囊(543)间油液传输的通路。4.根据权利要求3所述蝠鲼式仿生鱼,其特征在于,所述控制系统部件(53)包括固定在中间隔板(52)上的微型电脑(533)、舵机拓展板(534)、lora模块(531)、gps模块(532)、电池(535)和固定在基体部件(5)上的摄像头(535)、三合一天线(536)、深度计(537)。5.根据权利要求1所述蝠鲼式仿生鱼,其特征在于,所述胸鳍(1)为光敏树脂材料经3d打印制成,胸鳍截面为naca标准翼型截面。6.根据权利要求1所述蝠鲼式仿生鱼,其特征在于,所述基体部件(5)的蝠鲼式壳体(51)的截面为类翼型截面。7.根据权利要求2所述蝠鲼式仿生鱼,其特征在于,所述过渡板(31)为类翼型截面,边缘设有一圈凸台,边缘向外延伸形成安装板,所述支架(34)位于过渡板中心,过渡板(31)的板面还设有排气孔、舵机过线孔和泵油孔。8.根据权利要求7所述蝠鲼式仿生鱼,其特征在于,所述柔性蒙皮(32)的顶部为与阶梯轴垫片(21)配合的圆筒形,底部为与过渡板凸台配合的翼型截面形。9.一种权利要求1-8任一项所述蝠鲼式仿生鱼的浮力调节方法,其特征在于,如下:预设蝠鲼式仿生鱼的初始状态为悬浮状态,过渡部件(3)内油量为x,胸鳍(1)位于水平位置,仿生鱼的浮力等于重力;预设两个垂直距离h1和h2,且h2>h1;当初始位置到目标位置垂直距离小于h1时,定义为短距离下潜或上浮;当初始位置到目标位置垂直距离大于h1时,定义为长距离下潜或上浮,蠕动泵(541)泵油量设为k;当下潜至水底或上浮至水面时,蠕动泵(541)泵油量设为m,m>k;当蝠鲼式仿生鱼与目标位置垂直距离为h2时,定义为接近目标位置。识别指令任务,所述指令任务分为下潜和上浮;判断初始位置到目标位置垂直距离的类型,所述类型分为短距离,长距离、水底和水面;当指令任务为短距离下潜时,胸鳍(1)转动至俯翼位置后,仿生鱼进行摇拍翼运动,下潜至目标位置;当指令任务为长距离下潜时,过渡部件(3)减少油量至油量为x-k,同时胸鳍(1)转动至
俯翼位置后,进行摇拍翼运动;到达接近目标位置时,过渡部件(3)增加油量至油量为x,同时胸鳍停止运动并复位至水平位置,仿生鱼恢复悬浮状态,最后仿生鱼通过摇拍翼运动到达目标位置;当指令任务为下潜至水底时,过渡部件(3)减少油量至油量为x-m,m>k,同时胸鳍(1)转动至俯翼位置后,仿生鱼进行摇拍翼运动,直至下潜至水底;当指令任务为短距离上浮时,胸鳍(1)转动至仰翼位置后,仿生鱼进行摇拍翼运动,上浮至目标位置;当指令任务为长距离上浮时,过渡部件(3)增加油量至油量为x k,同时胸鳍(1)转动至仰翼位置后,进行摇拍翼运动;到达接近目标位置时,过渡部件(3)减少油量至油量为x,同时胸鳍(1)停止运动并复位至水平位置,仿生鱼恢复悬浮状态,最后仿生鱼通过摇拍翼运动到达目标位置;当指令任务为上浮至水面时,过渡部件(3)增加油量至油量为x m,m>k,同时胸鳍(1)转动至仰翼位置后,仿生鱼进行摇拍翼运动,直至上浮至水面。
技术总结
本发明公开了一种蝠鲼式仿生鱼及其浮力调节方法,蝠鲼式仿生鱼包括基体部件和胸鳍,胸鳍通过体积可变的过渡部件对称设置在基体部件两侧,过渡部件为过渡板和柔性蒙皮组成的密闭空腔结构,空腔内充有油液并设有控制胸鳍运动的驱动机构;基体部件的中间隔板上安装有控制系统和浮力调节机构,浮力调节机构通过控制过渡部件内的油量,改变过渡部件中柔性蒙皮的体积进而改变仿生鱼所受的浮力。本发明在不破坏蒙皮的情况下,可对鱼体进行多次拆装。本发明还将浮力调节机构和过渡部件结合起来,让仿生鱼结构更加紧凑简单。本发明通过对目标位置距离分类,控制过渡部件体积和胸鳍运动的方式,实现对仿生鱼的精准控制,使得仿生鱼能够准确移动至目标位置。准确移动至目标位置。准确移动至目标位置。
技术研发人员:陈珂 苏世杰 杨鑫 曹程程 王帅康 朱大双
受保护的技术使用者:江苏科技大学
技术研发日:2022.08.18
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。