1.本实用新型涉及管廊监控领域,具体涉及一种具有下坡刹车功能的管廊巡检机器人。
背景技术:
2.随着城市的发展,城市综合管廊的应用也越来越多,但是综合管廊是个半密闭空间,内部线路众多,人工排查危险性比较大,为了保证检查人员的安全,管廊巡检机器人就应运而生了,通常地底管廊通道内会设置有滑动导轨,管廊巡检机器人在滑动导轨上前进,然后通过机器人的摄像头对两侧的线路进行故障的排查,而现实中管廊内的滑动导轨并不会一直水平设置,往往会有倾斜的下坡段、上坡段,当管廊巡查机器人移动至滑动导轨的下坡段时,会由于没有辅助减速刹车的组件而使得下坡速度较快,不仅难以排查下坡段左右两侧的线路,也可能会由于下坡的惯性对巡查机器人本体内部零件造成损坏
技术实现要素:
3.为解决以上技术问题,本实用新型的主要目的是提供一种具有下坡刹车功能的管廊巡检机器人,本实用新型能够在巡检机器人本体下坡时利用巡检机器人本体的重力带动阻尼刹车轮倾斜从而顶住工字形滑轨的底部从而对巡检机器人本体起到减速、刹车的效果,避免了巡检机器人本体内部零件的损坏以及保证了巡检下坡段线路时的准确度。
4.为了达到上述目的,本实用新型采用以下技术方案予以解决。
5.一种具有下坡刹车功能的管廊巡检机器人,包括工字形滑轨,所述工字形滑轨包下坡段和水平段,所述工字形滑轨上挂设有巡检机器人本体;所述工字形滑轨前后两侧均设置有h形架,两个所述h形架相互靠近的一侧顶部均设置有滚轮,每个所述滚轮均置于所述工字形滑轨内,两个所述h形架之间设置有两个横杆,两个所述横杆分别位于所述h形架的左右两侧,左右两个所述横杆的前后两端分别与前后两个所述h形架固定连接;两个所述横杆均套设有阻尼刹车组件;所述阻尼刹车组件包括套环,左右两个所述套环分别套设在左右两个所述横杆上,左右两个所述套环均固定连接有连接柱,其中左侧的所述连接柱向左上角倾斜,右侧的所述连接柱向右上角倾斜,两个所述连接柱相互远离的一侧均铰接有有第一u形架,两个所述第一u形架内均铰接有阻尼刹车轮,两个所述连接柱底端均固定连接有空心套筒,两个所述空心套筒相互远离的一侧均设置有用于调节所述阻尼刹车轮角度的调节组件;两个所述空心套筒底端均转动连接有转动环,所述转动环底部设置有第一螺纹杆,所述第一螺纹杆顶端穿过所述转动环且置于所述空心套筒内,所述第一螺纹杆与所述转动环螺纹连接,所述第一螺纹杆与所述空心套筒内壁间隙设置,两个所述第一螺纹杆的底端均与所述巡检机器人本体相铰接
6.进一步地,所述调节组件包括水平放置的第二u形架,所述第二u形架靠近所述空心套筒的一端与所述空心套筒的杆壁固定连接,所述第二u形架内铰接有转动块,所述转动块内插设有第二螺纹杆且两者螺纹连接,所述第二螺纹杆顶端转动连接有转动件,所述转
动件水平插设有转动销且两者转动连接,所述转动销与所述第一u形架的后侧壁相铰接。
7.进一步地,所述转动环周侧开设有防滑纹。
8.进一步地,所述第二螺纹杆的底端固定连接有转动帽。
9.本实用新型技术方案能够在巡检机器人本体下坡时利用巡检机器人本体的重力带动阻尼刹车轮倾斜从而顶住工字形滑轨的底部从而对巡检机器人本体起到减速、刹车的效果,避免了巡检机器人本体内部零件的损坏以及保证了巡检下坡段线路时的准确度。
附图说明
10.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
11.图1为本实用新型巡检机器人本体位于下坡段状态的结构示意图;
12.图2为本实用新型巡检机器人本体位于下坡段状态的前侧视角结构示意图;
13.图3为本实用新型巡检机器人本体位于水平段状态的结构示意图;
14.图4为本实用新型巡检机器人本体位于水平段状态的前侧视角结构示意图;
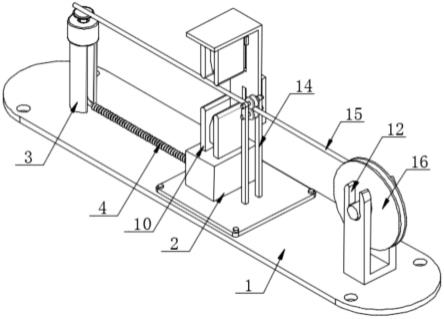
15.图5为本实用新型结构示意图;
16.图6为本实用新型左侧视角下的结构示意图;
17.图7为本实用新型调节组件的结构示意图;
18.图8为图5的a部分放大图。
19.在以上图中:1、工字形滑轨;101、h形架;102、滚轮;103、横杆;104、阻尼刹车组件;1041、套环;1042、连接柱;1043、第一u形架;1044、阻尼刹车轮;105、空心套筒;106、转动环;1061、防滑纹;107、第一螺纹杆;2、巡检机器人本体;3、调节组件;31、第二u形架;32、转动块;33、第二螺纹杆;331、转动帽;34、转动件;35、转动销。
具体实施方式
20.为了使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。
21.在以下描述中阐述了具体细节以便于充分理解本实用新型。但是本实用新型能够以多种不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似推广。因此本实用新型不受下面公开的具体实施方式的限制。
22.参考图1、图3和图7,一种具有下坡刹车功能的管廊巡检机器人,包括工字形滑轨1,所述工字形滑轨1包下坡段和水平段,所述工字形滑轨1上挂设有巡检机器人本体2;所述工字形滑轨1前后两侧均设置有h形架101,两个所述h形架101相互靠近的一侧顶部均设置有滚轮102,每个所述滚轮102均置于所述工字形滑轨1内,如图6所示,两个所述h形架101之间设置有两个横杆103,两个所述横杆103分别位于所述h形架101的左右两侧,左右两个所述横杆103的前后两端分别与前后两个所述h形架101固定连接;两个所述横杆103均套设有阻尼刹车组件104;所述阻尼刹车组件104包括套环1041,左右两个所述套环1041分别套设在左右两个所述横杆103上,左右两个所述套环1041均固定连接有连接柱1042,如图2所示,
其中左侧的所述连接柱1042向左上角倾斜,右侧的所述连接柱1042向右上角倾斜,两个所述连接柱1042相互远离的一侧均铰接有有第一u形架1043,两个所述第一u形架1043内均铰接有阻尼刹车轮1044,两个所述连接柱1042底端均固定连接有空心套筒105,两个所述空心套筒105相互远离的一侧均设置有用于调节所述阻尼刹车轮1044角度的调节组件3;两个所述空心套筒105底端均转动连接有转动环106,所述转动环106底部设置有第一螺纹杆107,所述第一螺纹杆107顶端穿过所述转动环106且置于所述空心套筒105内,所述第一螺纹杆107与所述转动环106螺纹连接,所述第一螺纹杆107与所述空心套筒105内壁间隙设置,两个所述第一螺纹杆107的底端均与所述巡检机器人本体2相铰接。
23.以上实施例中,通过设置的巡检机器人本体2通过两个h形架101、两个横杆103与滚轮102挂设在工字形滑轨1上,滚轮102会自带驱动装置,使得巡检机器人本体2能够在工字形滑轨1上移动,具体的两个横杆103起到了连接两个h形架101的作用,使其四者成为一体,每个h形架101上均设置有两个滚轮102,两个滚轮102且分别位于h形架101的左右两侧,通过设置的阻尼刹车组件104能够在滚轮102滚动至工字形滑轨1的下坡段时能够通过阻尼刹车轮1044顶住工字形滑轨1底部从而来起到刹车作用,具体的,当巡检机器人本体2在工字形滑轨1上向左侧前进时,如图3和图4所示,空心套筒105、连接柱1042、阻尼刹车轮1044会受到巡检机器人本体2自身的重力而保持水平段的倾斜度不变,随着巡检机器人本体2慢慢移动至下坡段时,阻尼刹车轮1044的顶部会逐渐靠近工字形滑轨1的底部,最终与其贴合,从而实现了刹车、减速的效果,通过在h形架101的两侧均设置有该阻尼刹车轮1044,其目的是为了使得巡检机器人本体2向右侧下坡时仍旧能够靠右侧的阻尼刹车轮1044来进行刹车,通过设置的转动环106能够在空心套筒105上实现转动的效果,当同时转动两个转动环106时,两个转动环106会分别带动与其相连接的第一螺纹杆107进行转动,由于两个第一螺纹杆107被巡检机器人本体2限位,从而会实现巡检机器人本体2高度发生变化,能够便于后期对较高的巡检机器人本体2进行维修,同时巡检机器人本体2高度越高,移动式,巡检机器人本体2的稳定性就越高,从而能够更加清楚的进行线路问题的排查。
24.进一步地,参考图5、图7和图8,所述调节组件3包括水平放置的第二u形架31,所述第二u形架31靠近所述空心套筒105的一端与所述空心套筒105的杆壁固定连接,所述第二u形架31内铰接有转动块32,所述转动块32内插设有第二螺纹杆33且两者螺纹连接,所述第二螺纹杆33顶端转动连接有转动件34,所述转动件34水平插设有转动销35且两者转动连接,所述转动销35与所述第一u形架1043的后侧壁相铰接。
25.以上实施例中,通过设置的第二u形架31能够实现转动块32在其内部自由的转动,通过设置的第二螺纹杆33能够在转动块32内实现螺纹转动,从而起到伸长、缩短的效果,通过设置的转动件34能够与第二螺纹杆33进行转动,当第二螺纹杆33发生螺纹转动时,转动件34被转动销35与第一u形架1043限位后不随第二螺纹杆33的转动而转动,具体的,当需要调节第一u形架1043以及阻尼刹车轮1044在连接柱1042上转动的角度时,只需要转动第二螺纹杆33即可,随着第二螺纹杆33的转动,第二螺纹杆33能够在转动块32内螺纹转动,转动块32也会在第二u形架31内发生一定角度的转动,此时第二螺纹杆33会通过转动件34给与转动销35倾斜向上的推力,此时,阻尼刹车轮1044会更加靠近工字形滑轨1,当逆时针转动第二螺纹杆33时,阻尼刹车轮1044也会随着第一u形架1043在连接柱1042上发生逆时针转动,从而使得阻尼刹车轮1044远离工字形滑轨1,具体的,阻尼刹车轮1044随着第一u形架
1043在连接柱1042上转动的角度极限值小于九十度,从而实现了阻尼刹车轮1044初始角度的调节,可适用不同斜坡的工字形滑轨1,适用性较强。
26.进一步地,参考图7,所述转动环106周侧开设有防滑纹1061。
27.以上实施例中,设置的防滑纹1061,能够增加使用者手部与转动环106之间的摩擦力。
28.进一步地,参考图8,所述第二螺纹杆33的底端固定连接有转动帽331。
29.以上实施例中,通过设置的转动帽331,能够便于使用者对第二螺纹杆33的转动。
30.虽然,本说明书中已经用一般性说明及具体实施方案对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员是显而易见的。因此,在不偏离本实用新型的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。