1.本发明属于极地声学定位技术领域,具体涉及一种基于单阵元时频曲线匹配的冰声定位方法。
背景技术:
2.冰声定位是一种面向极地,针对冰层中的声源信号进行定位的方法。冰声定位是北极水声学的重要研究内容,对于保障北极科学考察冰上人员的安全、北极航道船舶航行、极地海冰突发事件监测具有重大意义。
3.无线电等媒介受海水的吸收效应会迅速衰减,无法进行远距离应用,声波是目前海水中唯一能够远距离传播的媒介。现有的水声学定位通常依赖常规水听器或矢量水听器等声呐设备,并结合布放在海面或海底的长基线(lbl)、短基线(sbl)以及超短基线(ssbl)等定位系统实现。
4.北极海域常年被数米厚的海冰覆盖,导致声呐设备存在海面或海底布放条件困难以及基线单元坐标校准等问题。另外,由于冰层属于弹性固体,与海水中声波传播的物理特性不同,导致现有的依赖于海水声传播原理的声学定位方法和声呐设备无法直接应用于极地冰区声学定位场景。
5.冰层和海水之间相互运动、冰下声学目标或冰面目标撞击冰层等事件,造成冰层相互挤压、剪切、破裂,产生了脉冲噪声。极地冰层作为一种板状构型的弹性介质,冰层中的声源会在冰层中产生能量较强的a0兰姆波模态。在最新同类技术发明专利中,《一种基于弯曲波的冰上震源定位方法》提出利用希尔伯特黄变换(hht)提取了200hz带宽内a0模态确定声源位置的方法,并通过有限元方法仿真的数据验证。《一种针对极地冰层的震源定位方法》提出了一种基于单个三分量检波器的冰层声源定位方法,利用冰层中s0模态和sh模态之间的时延关系确定声源位置。
6.由于实际环境中存在较高的低频背景噪声和脉冲干扰,这种噪声来自于海洋本底低频噪声、甲壳类无脊椎生物活动、冰层和海水之间的相互运动及人类作业活动。另外声呐采集设备在极地恶劣环境下也会受到电路本身自噪声影响,采集的信号信噪比较低。冰层中的s0模态和sh模态信号能量比a0模态能量更低,被淹没在噪声和干扰中,a0模态也会受噪声干扰。
技术实现要素:
7.本发明的目的在于提供一种基于单阵元时频曲线匹配的冰声定位方法。
8.一种基于单阵元时频曲线匹配的冰声定位方法,包括以下步骤:
9.步骤1:在冰面上布放声信号采集装置,采集冰层中的声源发出的a0模态信号;
10.步骤2:采用反卷积时频分析提取a0模态信号的时频谱图;
11.步骤3:根据a0模态信号的时频谱图,提取频散曲线t1(ω);
12.步骤4:基于海冰-海水耦合声传播模型获取理论频散曲线t2(ω,r);
[0013][0014]
其中,t0为信号波形的截取时间点;r表示冰层中的声源相对于信号采集装置的期望距离;ω表示角频率;cg(ω)为a0模态在角频率为ω时的群速度,k(ω)为a0模态在角频率为ω时的水平波数,c
p
(ω)为a0模态在角频率为ω时的相速度;k(ω)、c
p
(ω)通过海冰-海水耦合声传播模型求解;
[0015]
步骤5:根据实际频散曲线t1(ω)与理论频散曲线t2(ω,r)获取的冰层中的声源相对于信号采集装置的距离r,完成对于冰层中的声源定位。
[0016]
进一步地,所述步骤5中冰层中的声源相对于信号采集装置的距离r的计算方法具体为:
[0017][0018]
ρ(r)=1/||[t1(ω)-min(t1(ω))]-[t2(ω,r)-min(t2(ω,r))]||
[0019]
其中,||
·
||表示取2范数值。
[0020]
进一步地,所述步骤5中冰层中的声源相对于信号采集装置的距离r的计算方法具体为:
[0021]
步骤5.1:预估计冰层中的声源相对于信号采集装置的期望距离r2;
[0022]
步骤5.2:令r=r2,计算理论频散曲线t2(ω,r)的标准差
[0023]
步骤5.3:计算实际频散曲线t1(ω)的标准差
[0024]
步骤5.4:计算冰层中的声源相对于信号采集装置的距离r;
[0025][0026]
进一步地,所述步骤2中采用反卷积时频分析提取a0模态信号的时频谱图的方法具体为:
[0027]
反卷积时频分析表示为:
[0028][0029]
其中,m为迭代次数;表示二维卷积操作;b(x,y)为a0模态信号的谱图;fm(x,y)为基于反卷积方法优化m次后的谱图;x和y分别为谱图的时间域采样点和频率域采样点;s(
·
)为点散射函数,p为矩形窗函数点数,n为离散傅里叶变换点数。
[0030]
进一步地,所述步骤1中的声信号采集装置采用加速度计。
[0031]
本发明的有益效果在于:
[0032]
1.信号接收装置:采用加速度计取代检波器,接收到具有更高的频带的数据,避免低频噪声干扰,能够有效利用更宽频带的声场信息;
[0033]
2.定位信号类型:由于冰层的存在,环境中具有能量更强的a0模态,因此选择a0模态作为定位的信号类型,海水p波、冰层s0和sh模态容易被噪声干扰;
[0034]
3.提取a0模态时频曲线方法:采用反卷积方法提取模态频散曲线,在实际极地环境中,该方法相比于希尔伯特黄变换(hht)更具有实用性;
[0035]
4.定位特征参数与方法:根据实际信号和理论时频曲线的关系,提出了两种定位方法,一个是采取实际信号与不同距离的理论时频曲线匹配相关的方法,基于极大值原则确定声源距离;第二个是基于实际时频曲线的标准偏差与理论时频曲线标准偏差的数值关系,直接求解声源距离;
[0036]
5.和现有方法相比,由于冰层声源的初始时间一般不能获取,导致无法通过接收的冰层信号获得实际的到达时间,本发明采用时频曲线或者统计参数作为定位参数具有实用性。
附图说明
[0037]
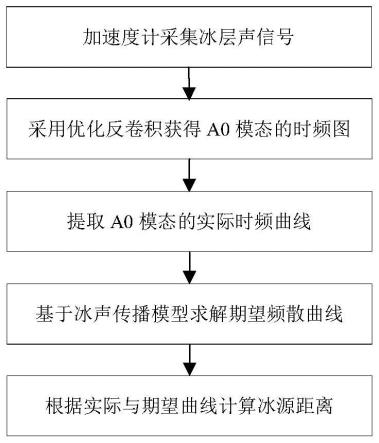
图1是本发明的总体流程图。
[0038]
图2是本发明的实施例中采集120m声源的信号波形图。
[0039]
图3是采用希尔伯特黄变换(hht)提取时频曲线的示意图。
[0040]
图4是本发明的实施例中采用反卷积时频分析提取时频曲线的示意图。
[0041]
图5是本发明的实施例中声源距离为100m、200m和300m时求解的理论时频曲线图。
[0042]
图6是本发明的实施例中期望声源距离r与相关系数ρ(r)的计算结果数据表。
[0043]
图7是本发明的实施例中期望声源距离r与相关系数ρ(r)的曲线图。
具体实施方式
[0044]
下面结合附图对本发明做进一步描述。
[0045]
本发明基于海冰海水耦合声传播特点,针对极地实际恶劣环境,采用外场实验数据,提出基于模态时频曲线匹配的冰声定位方法,并与现有方法进行了对比验证,提高方法的实用性。
[0046]
步骤1:在冰面上布放声信号采集装置,采集冰层中的声源发出的a0模态信号;
[0047]
在冰面上布放声信号采集装置,相比于在冰下布放具有工作难度小,坐标可精确校准等优势。冰面上的接收装置采用加速度计,而不是现有定位方法中的地震检波器来接收声源发出的声信号。加速度计的接收频带宽度可达到10000hz,而现有定位方法中使用的三分量检波器的接收频带约100hz。由于实际声场环境中低频噪声的能量远大于高频噪声,所以通过采用加速度计作为接收装置这一点改进可以有效的采集冰层中的更宽频带的声信号,避免低频噪声的干扰。
[0048]
根据冰层声波的传播特性,冰层中的a0模态能量要大于s0和sh模态,为了避免较强噪声的干扰,采集a0模态信号作为定位手段,将加速度计布放在冰面上采集声信号。
[0049]
步骤2:采用反卷积时频分析提取a0模态信号的时频谱图;
[0050]
现有的提取频散曲线的方法包括希尔伯特黄变换(hht)、短时傅里叶变换(stft)、小波变换(wt)以及魏格纳分布(wvd)。但是由于实际采集信号噪声仍然较低,以上方法经过验证,均无法有效提取冰层a0模态的频散曲线,进而降低了冰声方法的实用性。
[0051]
本发明提出使用优化的反卷积方法来获得高分辨的时频谱图,并提取a0模态的频散曲线。反卷积时频分析表示为:
[0052][0053]
式中,m为迭代次数;表示二维卷积操作;b(x,y)为a0模态信号的谱图;fm(x,y)为基于反卷积方法优化m次后的谱图;x和y分别为谱图的时间域采样点和频率域采样点;特别地,s(
·
)为本发明中特有的点散射函数,定义为:
[0054][0055]
式中,p为矩形窗函数点数,n为离散傅里叶变换点数。
[0056]
外场实测数据结果证明,优化反卷积方法可以有效提取冰层中的a0模态,克服环境噪声干扰。
[0057]
步骤3:根据a0模态信号的时频谱图,提取频散曲线t1(ω);
[0058]
步骤4:基于海冰-海水耦合声传播模型获取理论频散曲线t2(ω,r);
[0059]
距离为r的声源激发出冰层a0模态的不同频率相对到达时间为:
[0060][0061]
式中t0为信号波形的截取时间点,cg(ω)为a0模态在角频率为ω时的群速度,群速度计算公式:
[0062][0063]
k(ω)为a0模态在角频率为ω时的水平波数,c
p
(ω)为a0模态在角频率为ω时的相速度;k(ω)、c
p
(ω)通过海冰-海水耦合声传播模型求解;
[0064]
步骤5:根据实际频散曲线t1(ω)与理论频散曲线t2(ω,r)获取的冰层中的声源相对于信号采集装置的距离r,完成对于冰层中的声源定位。
[0065]
本发明提出了两种实现方法:
[0066]
第一种实现方法是匹配相关法求解声源距离,定义相关系数为:
[0067]
ρ(r)=1/||[t1(ω)-min(t1(ω))]-[t2(ω,r)-min(t2(ω,r))]||
[0068]
其中,||
·
||表示取2范数值。
[0069]
估计的声源距离为:
[0070][0071]
根据相关系数定义,对于声源的实际距离r1,理论的相关系数为:
[0072]
ρ(r)=||cg(ω)||/|r
1-r|
[0073]
即当r=r1时,相关系数有极大值,使相关系数最大的期望声源距离r即为估计的实际声源距离。
[0074]
第二种实现方法是基于时频曲线的标准差规律直接求解声源距离。根据信号时频
曲线的定义,实际采集信号的时频曲线t1(ω)的标准偏差为:
[0075][0076]
模型计算的理论时频曲线t2(ω,r)的标准偏差:
[0077][0078]
因此,实际声源距离的估计值:
[0079][0080]
具体实现步骤为:
[0081]
步骤5.1:预估计冰层中的声源相对于信号采集装置的期望距离r2;
[0082]
步骤5.2:令r=r2,计算理论频散曲线t2(ω,r)的标准差
[0083]
步骤5.3:计算实际频散曲线t1(ω)的标准差
[0084]
步骤5.4:计算冰层中的声源相对于信号采集装置的距离r;
[0085][0086]
本发明提出的两种定位方法能有效的通过冰上加速度计定位声源位置,提高了冰声定位方法的实用性。
[0087]
实施例1:
[0088]
如图1所示,本发明提供的定位方法流程图。具体步骤如下:
[0089]
步骤1:冰层上的接收装置采用加速度计,而不是现有冰声定位方法中的检波器来接收声源发出的声信号。加速度计的接收频带宽度可达到10000hz,而现有的冰声定位方法中使用的三分量检波器的接收频带约100hz。由于实际环境中低频噪声能量远大于高频噪声能量,所以通过采用加速度计作为接收装置这一点改进可以有效的采集冰层中的声信号,避免一部分低频噪声的干扰;如图2所示,在将结冰的江上布放的加速度计采集了距离为120.7m的爆炸声源激发的a0模态,1800个采样点,采样频率为40khz。由于加速度计与爆炸声源并不同步,符合实际应用需求,实际并不知道声源的激发时间,时间轴数值为信号的相对到达时间,信号受设备噪声干扰影响,a0模态持续时间约为10-20ms。
[0090]
步骤2:选择能量更强的a0模态取代海水p波、冰层s0和sh模态作为定位依据;并采用优化的反卷积方法来获得高分辨的时频谱图,并提取a0模态的频散曲线。
[0091]
在极地环境中,采用反卷积方法提取模态频散曲线相比于stft、wt、hht,更具有实用性,如图3所示,hht无法完成对时频曲线的提取;
[0092]
步骤3:由于冰层声源的初始时间一般不能获取,导致无法通过接收的冰层信号获得实际的到达时间。本发明采用反卷积提取时频曲线作为定位参数具有实用性;根据反卷积计算结果,选取合适的频点组合,构成实际信号的时频曲线;如图4所示,对信号波形进行反卷积方法得到的结果,满足时频曲线提取的分辨要求。
[0093]
步骤4:基于海冰-海水耦合声传播模型获取理论频散曲线t2(ω,r);如图5所示,为声源距离为100m、200m和300m时求解的理论时频曲线。
[0094]
步骤5:根据步骤3中的实际信号的时频曲线t1(ω)和步骤4中的理论的时频曲线t2(ω,r),求解声源距离;
[0095][0096]
ρ(r)=1/||[t1(ω)-min(t1(ω))]-[t2(ω,r)-min(t2(ω,r))]||
[0097]
其中,||
·
||表示取2范数值。
[0098]
如图6、图7所示,当期望声源距离为122m时,相关系数最大,即估计的声源距离为源距离为与实际测量值120.7m,误差为1.08%。
[0099]
实施例2:
[0100]
进一步地,步骤5中采用另一种方法计算冰层中的声源相对于信号采集装置的距离r:
[0101]
步骤5.1:预估计冰层中的声源相对于信号采集装置的期望距离r2;
[0102]
步骤5.2:令r=r2,计算理论频散曲线t2(ω,r)的标准差
[0103]
步骤5.3:计算实际频散曲线t1(ω)的标准差
[0104]
步骤5.4:计算冰层中的声源相对于信号采集装置的距离r;
[0105][0106]
如图4所示,实际曲线的标准偏差为0.0034,如图5所示,r=100m的理论曲线的标准偏差为0.0029。基于标准偏差法估计的声源距离为r=120.5m,与实际声源位置120.7m相比,误差为0.2m。
[0107]
外场实测数据结果证明,本发明提出的两种计算冰层中的声源相对于信号采集装置的距离r的方法能有效的通过冰上加速度计定位声源位置。
[0108]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。