1.本发明属于垃圾分类技术领域,尤其是涉及一种分类垃圾桶及工作方法。
背景技术:
2.在现如今的日常中,几乎每天都会用到垃圾桶。垃圾桶的品种多种多样,从一开始的无盖到有盖,再到踩踏式,到现今的智能垃圾桶,可以看出人们在日常生活中越来越看重和在意垃圾桶的外在形状,垃圾桶也变得越来越便捷和更加走向智能型。 垃圾桶智能管理系统对专业技术的要求比较高也比较严格。人们大都觉得,一般的垃圾智能管理系统的目的就是清理人们日常生活中整理出来的垃圾,而且日常很多垃圾桶都是带盖垃圾桶,这样不卫生和不方便,并且不能进行自动分类,未能充分使得资源得到有效利用,智能垃圾管理系统在很多地方都能看到,其里面蕴含的科技内容也越来越高,补充了市场上的缺陷,使垃圾进行更加高效的分类,保护我们的大自然环境。智能垃圾桶里面的管理系统是人类在科技方面的胜利成果,也是这个社会越来越高科技发展的一个展现。
3.垃圾又被称为“放错了地点的财富”,垃圾从现场收集回来后对于可回收垃圾需要经过分类分拣后再回收利用。垃圾收集分类后的归类储存仍然以人工为主且分类后的垃圾堆放无序不仅使操作人员劳动强度高、垃圾占地面积大而且对环境也易造成二次污染。
4.现有中国专利申请号为202011492846.3,公告日为2022.03.30的专利文献,该发明涉及一种自动封口推袋垃圾箱,包括壳体,所述壳体对应一组单独的垃圾桶,通过利用所述垃圾容量检测系统对壳体内的垃圾容量进行检测,利用封口机构和推动机构实现对满载的垃圾袋进行自动打包,自动将打包好的垃圾从壳体推出的目的,完全替代了传统垃圾收集工作过程中人工对满载的垃圾袋进行封口和取出垃圾箱的情况;使得智能分类垃圾箱在智能投放垃圾、智能识别垃圾的同时,进一步实现自动封袋并打包推出垃圾箱的目的,进一步减少社区对垃圾收集工作人员的配置;实现人员配置的成本减少的目的,以及,避免人员在打包过程中接触垃圾的情况,有效保证垃圾运输工作人员的身体健康。但是该发明在分类与打包的过程中较慢,而打包好的垃圾堆叠在一起,没办法及时转移处理。
技术实现要素:
5.本发明的目的在于提供一种分类垃圾桶,自动化程度高、分拣效率高、转移打包速度快。
6.为达到上述目的,一种分类垃圾桶,包括壳体,所述壳体的一侧设有投放口,所述箱体上端设有分类装置,分类装置与投放口对应设置,分类装置下端的外壳内设有两个以上的储存箱,储存箱上端设有落入口,储存箱上的前端设有推出口,所述储存箱内设有用于将垃圾袋口进行热封的热封装置、用于将垃圾袋沿推出口推出的推送装置和用于储存箱内更换垃圾袋的更换装置;所述储存箱的上方设有热封装置,在热封装置下方的储存箱内设有推送装置,在储存箱的底部设有更换装置;所述分类装置包括分类箱,所述分类箱与投放口相对应设置;在分类箱内设有开合舵机和分选箱,所述开合舵机设于分选箱外侧,所述分
选板设置在分选箱下方且分选板的一端与分选箱的两端铰接,所述开合舵机的输出端与分选板一端连接,开合舵机驱动分选板闭合与分选箱连接形成上端开口的箱体结构;分选板位于落入口的上端,所述分选箱内设有用于分类垃圾的分类摄像头。
7.以上设置,通过对垃圾桶壳体内设计有多个可对垃圾进行分类的储存箱,垃圾从投放口放入至分类装置中的分选箱中,再通过分选箱内的分类摄像头对垃圾进行分类识别,从而判断出垃圾的种类,并将分选箱转移至对应分类的储存箱上方,由于分选板位于落入口的上端,且开合舵机驱动分选板闭合与分选箱连接形成上端开口的箱体结构,从而使得开合舵机的输出端控制分选板打开,垃圾从分选箱中掉落进对应分类的储存箱落入口中,从而储存在储存箱内,进而实现垃圾自动化分类,储存箱内通过更换装置对储存箱内铺设新的垃圾袋,当储存箱中分类的垃圾袋装满后,储存箱中通过设置热封装置对垃圾袋袋口进行热封,防止垃圾在转移过程中散落出来,最后通过储存箱内的推送装置将热封好的垃圾袋沿推出口推出,分拣速度快。
8.进一步的,所述储存箱底部还设有垃圾袋滚筒输送装置,所述垃圾袋滚筒输送装置包括垃圾袋存放盒、滚筒主动轴、滚筒从动轴、滚筒从动轴承、滚筒电机、滚筒联轴器、连接件、主动滚筒和从动滚筒,所述垃圾袋存放盒设置在储存箱的最低端,在垃圾袋存放盒的两侧设有连接件,所述主动滚筒两端通过第一轴承连接在连接件上,从动滚筒通过第二轴承连接在主动滚筒一侧的连接件上,在主动滚筒和从动滚筒之间形成容纳垃圾袋通过的间隙,在垃圾袋存放盒一侧的储存箱上设有滚筒电机,所述滚动电机的输出端上设有滚筒联轴器,所述滚筒主动轴的一端连接滚筒联轴器,滚筒主动轴的另一端连接主动滚筒的一端;在垃圾存放盒的另一侧的储存箱上设有滚筒从动轴承,滚筒从动轴的一端转动的设置在滚筒从动轴承上,滚筒从动轴的另一端与主动滚筒的另一端连接,在垃圾袋存放盒的前端设有垃圾袋挡板,所述垃圾袋挡板与垃圾袋存放盒扣合连接;在储存箱底部还设有垃圾袋入口,所述垃圾袋开口与间隙相对应设置。
9.以上设置,当存储箱没有可更换的垃圾袋时,将垃圾袋挡板打开,人工将新的垃圾袋沿着间隙向上伸出至垃圾袋入口,然后人工从推出口将垃圾袋拉起并固定在更换装置上,将垃圾袋挡板重新扣合在垃圾袋存放盒上即可实现垃圾袋的更换,简单方便,当存储箱内的垃圾袋存放满垃圾后后,推送装置将存满垃圾的垃圾袋推出口,更换装置需要铺设新的垃圾袋时,通过滚筒电机输出端驱动滚筒联轴器转动,滚筒联轴器带动主动滚筒转动,垃圾袋平铺在主动滚筒与从动滚筒之间的间隙中,主动滚筒转动时,从动滚动与主动滚筒配合压住垃圾袋并带动垃圾袋向上移动至垃圾袋入口,进而方便更换装置进行垃圾袋的更换。
10.进一步的,所述更换装置包括开口气缸、安装杆和移动杆,在存储箱底端的内壁上设有安装槽,安装槽设于储存箱内沿推出口水平方向设置,垃圾袋入口位于安装槽的中心,在垃圾袋入口两端的安装槽上设有安装杆,在安装槽的两端设有顶升气缸,在顶升气缸的输出端上设有开口气缸,所述开口气缸的输出端连接安装杆,在储存箱内壁上设有与安装槽两端相对应的移动槽,所述移动槽自储存箱的底部延伸至储存箱的顶部设置,所述开口气缸驱动安装杆沿着安装槽移动设置,所述顶升气缸驱动安装杆沿着移动槽上下移动设置;所述安装杆内侧设有黏胶。
11.以上设置,垃圾袋开口沿着间隙进入到储存箱内部后,再开口气缸输出端驱动两
安装杆沿安装槽的方向相互靠近移动,直至两安装杆的内侧的黏胶分别与垃圾袋开口两侧接触后,开口气缸输出端反向驱动安装杆沿安装槽的方向相互远离移动,直至垃圾袋开口被打开,当安装杆被开口气缸驱动至移动槽的位置后,顶升气缸驱动安装杆沿着移动槽向落入口的方向向上移动,带动垃圾袋移动向上铺设满储存箱内部,结构简单。
12.进一步的,所述热封装置包括热封气缸一、热封气缸二、热封杆一和热封杆二,所述热封气缸一设置在储存箱顶部的一侧,在热封气缸一的输出端上设有热封杆一,所述热封杆一的两端向储存箱的两端内壁延伸,并且热封杆一两端的长度小于储存箱两端的移动槽之间的距离,热封气缸一驱动热封杆一向储存箱的另一侧移动,储存箱顶部的一端设有热封气缸二,在热封气缸二的输出端上设有热封杆二,所述热封杆二的两端向储存箱的两侧内壁延伸,并且热封杆二两端的长度小于储存箱两侧内壁之间的距离,热封气缸二驱动热封杆二向储存箱的另一端移动,所述热封杆二位于热封杆一下方且靠近热封杆一设置,所述储存箱内设有红外检测装置;在热封杆一远离热封杆二的一端上设有电热阻片。
13.以上设置,垃圾从分选箱放入至对应的储存箱内的垃圾袋内,当红外检测装置检测到垃圾袋装满后,热风气缸一驱动热封杆一向储存箱另一侧移动,在热封杆一推动垃圾袋口从安装杆中分离带动垃圾袋压至储存箱另一侧,进而将垃圾袋的上端部挤压在储存箱的另一侧的内壁上,此时垃圾袋与安装杆脱离,顶升气缸驱动安装杆沿着移动槽向储存箱底部的方向向下移动,最后,热封气缸二驱动热封杆二向储存箱另一端移动并将垃圾袋推动至电热阻片的位置上,此时垃圾袋上端部被挤压使得垃圾袋封口,再通过电热组片进行短时间的通电,使得垃圾袋的封口进行加热压缩,从而使得封口实现融合封闭,当垃圾袋的封口融合封闭后,热封杆一和热封杆二恢复原位,由此实现垃圾袋的封装,结构简单。
14.进一步的,所述推送装置包括推送杆、推送槽和推送气缸,在储存箱两侧的内壁上设有推送槽,所述推送气缸设置在储存箱中部的一端,在推送气缸的输出端上设有推送杆,推送杆沿着推送槽滑动。
15.以上设置,当垃圾袋装满并被热封后,通过推送气缸输出端驱动推送杆将垃圾袋沿推出口推出,垃圾袋推出后推送杆恢复至初始位置。
16.进一步的,所述分类装置还包括固定架、分选电机、分选联轴器、旋转轴和转动杆,所述固定架设于箱体上端,所述分选电机固定于所述固定架下端,所述分选联轴器一端与分选电机的输出端固定连接,分选联轴器另一端与旋转轴一端固定连接,所述旋转轴另一端设有固定套筒,所述转动杆中部与固定套筒固定连接,所述转动杆一端与分选箱固定连接。
17.以上设置,固定在固定架下端的分选电机的输出端转动带动分选联轴器同步转动,分选联轴器转动同步带动旋转轴转动,与旋转轴另一端上固定套筒固定连接的转动杆同步转动,位于转动杆一端固定连接的分选箱同步转动,因此分选箱可以位于壳体内在储存箱上方转动,当识别到防止在分选箱上的垃圾类别好,驱动分选电机旋转带动分选箱转动至对应的垃圾类别的储存箱上方。
18.进一步的,所述储存箱推出口方向连接有垃圾箱,所述垃圾箱靠近储存箱一侧设有推入口,所述推入口与推出口相对设置,所述垃圾箱与推入口相对一侧设有推拉门,垃圾箱内设有红外传感器。
19.以上设置,垃圾袋沿推出口推出后沿推入口进到垃圾箱内,当垃圾箱内的红外传
感器识别到有垃圾袋进入后,发送信息至保洁人员提醒清理垃圾,保洁人员可以通过推拉门将垃圾从垃圾箱中取出转移,整体结构简单。
20.一种分类垃圾桶的工作方法通过智能分类垃圾桶实现,具体步骤如下:(1)将单个垃圾从投放口放入分选箱中,在分选箱中识别出该垃圾种类;(2)分选电机旋转带动分选箱转动至该垃圾分类的储存箱上方;(3)开合舵机动作带动分选板转动,垃圾掉入到储存箱内;(4)当检测到垃圾袋装满后;(4.1)在热封杆一推动垃圾袋口从安装杆中分离带动垃圾袋压至储存箱另一侧,进而将垃圾袋的上端部挤压在储存箱的另一侧的内壁上;(4.2)顶升气缸驱动安装杆沿着移动槽向储存箱底部的方向向下移动恢复原位;(4.3)热封气缸二驱动热封杆二向储存箱另一端移动并将垃圾袋推动至点热阻片的位置上;(4.4)电热组片进行短时间的通电,使得垃圾袋的封口进行加热压缩,从而使得封口实现融合封闭;(5)最后通过推送气缸输出端驱动推送杆将垃圾袋沿推出口推出,垃圾袋沿推入口进入至垃圾箱内;(6)当需要更换垃圾袋时;(6.1)在储存箱放入垃圾前,滚筒电机转动带动垃圾袋沿主动滚筒与从动滚筒之间的间隙向储存箱底部的垃圾袋入口方向移动;(6.2)通过开口气缸输出端驱动两安装杆沿安装槽的方向相互靠近移动,直至两安装杆的内侧的黏胶分别与垃圾袋开口两侧接触后,开口气缸输出端反向驱动安装杆沿安装槽的方向相互远离移动,直至垃圾袋开口被打开;(6.3)顶升气缸驱动安装杆沿着移动槽向落入口的方向向上移动,带动垃圾袋移动向上铺设满储存箱内部。
附图说明
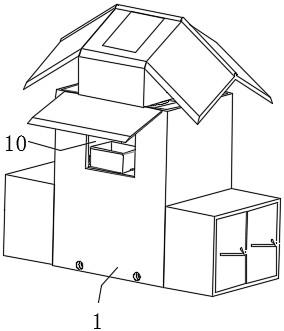
21.图1为本发明一种分类垃圾桶的结构示意图。
22.图2为本发明中固定架与分类装置的结构示意图。
23.图3为本发明中固定架与分类装置的爆炸图示意图。
24.图4为本发明中分选箱处于闭合状态的结构示意图。
25.图5为本发明中分选箱处于打合状态的结构示意图。
26.图6为本发明中储存箱的结构示意图。
27.图7为本发明中储存箱的主视图。
28.图8为图7中a-a的剖视图。
29.图9为本发明中储存箱的侧视图。
30.图10为图9中b-b的剖视图。
31.图11为图9中e-e的剖视图。
32.图12为本发明中储存箱的爆炸图。
33.图13为本发明垃圾袋滚筒输送装置的结构图。
34.图14为本发明一种分类垃圾桶的爆炸图。图15为本发明的热封装置的简单示意图。
35.图16为本发明智能分类垃圾桶的工作流程图。
具体实施方式
36.下面结合附图和具体实施方式对本发明做进一步详细说明。
37.一种分类垃圾桶,包括壳体1,所述壳体1的一侧设有投放口10,所述箱体上端设有分类装置2,分类装置2与投放口10对应设置,分类装置2下端的外壳内设有两个以上的储存箱3,储存箱3上端设有落入口30,储存箱3上的前端设有推出口31,所述储存箱3内设有用于将垃圾袋口进行热封的热封装置、用于将垃圾袋沿推出口31推出的推送装置5和用于储存箱3内更换垃圾袋的更换装置6;所述储存箱3的上方设有热封装置,在热封装置下方的储存箱3内设有推送装置5,在储存箱3的底部设有更换装置6;所述分类装置2包括分类箱,所述分类箱与投放口10相对应设置;在分类箱内设有开合舵机(图中未示出)和分选箱26,所述开合舵机设于分选箱26外侧,所述分选板261设置在分选箱26下方且分选板的一端与分选箱26的两端铰接,所述开合舵机的输出端与分选板261一端连接,开合舵机驱动分选板261闭合与分选箱26连接形成上端开口的箱体结构;分选板261位于落入口30的上端,所述分选箱26内设有用于分类垃圾的分类摄像头(图中未示出)。在本实施例中,通过分类摄像头实现对垃圾分类为现有技术,如中国专利申请号为cn20220809564.x的专利文件,其也是通过摄像头来实现分类,具体分类方法为现有技术,在此不再累述。
38.以上设置,通过对垃圾桶壳体1内设计有多个可对垃圾进行分类的储存箱3,垃圾从投放口10放入至分类装置2中的分选箱26中,再通过分选箱26内的分类摄像头对垃圾进行分类识别,从而判断出垃圾的种类,并将分选箱26转移至对应分类的储存箱3上方,由于分选板261位于落入口30的上端,且开合舵机驱动分选板261闭合与分选箱26连接形成上端开口的箱体结构,从而使得开合舵机的输出端控制分选板261打开,垃圾从分选箱26中掉落进对应分类的储存箱3落入口中,从而储存在储存箱3内,进而实现垃圾自动化分类,储存箱3内通过更换装置6对储存箱3内铺设新的垃圾袋,当储存箱3中分类的垃圾袋装满后,储存箱3中通过设置热封装置对垃圾袋袋口进行热封,防止垃圾在转移过程中散落出来,最后通过储存箱3内的推送装置5将热封好的垃圾袋沿推出口推出,分拣速度快。
39.如图12所示,所述储存箱3底部还设有垃圾袋滚筒输送装置7,所述垃圾袋滚筒输送装置7包括垃圾袋存放盒79、滚筒主动轴740、滚筒从动轴750、滚筒从动轴承70、滚筒电机71、滚筒联轴器72、连接件73、主动滚筒74和从动滚筒75,所述垃圾袋存放盒79设置在储存箱3的最低端,在垃圾袋存放盒79的两侧设有连接件73,所述主动滚筒74两端通过第一轴承连接在连接件73上,从动滚筒75通过第二轴承连接在主动滚筒74一侧的连接件73上,在主动滚筒74和从动滚筒75之间形成容纳垃圾袋通过的间隙76,在垃圾袋存放盒79一侧的储存箱3上设有滚筒电机71,所述滚动电机71的输出端上设有滚筒联轴器72,所述滚筒主动轴740的一端连接滚筒联轴器72,滚筒主动轴740的另一端连接主动滚筒74的一端;在垃圾存放盒79的另一侧的储存箱3上设有滚筒从动轴承70,滚筒从动轴750的一端转动的设置在滚筒从动轴承750上,滚筒从动轴750的另一端与主动滚筒75的另一端连接,在垃圾袋存放盒79的前端设有垃圾袋挡板790,所述垃圾袋挡板790与垃圾袋存放盒79扣合连接;在储存箱3
底部还设有垃圾袋入口78,所述垃圾袋开口与间隙76相对应设置。
40.以上设置,当存储箱3没有可更换的垃圾袋时,将垃圾袋挡板790打开,人工将新的垃圾袋沿着间隙76向上伸出至垃圾袋入口78,然后人工从推出口31将垃圾袋拉起并固定在更换装置6上,将垃圾袋挡板790重新扣合在垃圾袋存放盒79上即可实现垃圾袋的更换,简单方便,当存储箱3内的垃圾袋存放满垃圾后后,推送装置5将存满垃圾的垃圾袋推出口,更换装置6需要铺设新的垃圾袋时,通过滚筒电机71输出端驱动滚筒联轴器72转动,滚筒联轴器72带动主动滚筒74转动,垃圾袋平铺在主动滚筒74与从动滚筒75之间的间隙76中,主动滚筒74转动时,从动滚动与主动滚筒74配合压住垃圾袋并带动垃圾袋向上移动至垃圾袋入口78,进而方便更换装置6进行垃圾袋的更换;在本实施例中,所述的垃圾袋为卷筒垃圾袋,当滚筒电机71驱动主动滚筒74转动并带动垃圾袋向上移动时,卷筒垃圾袋跟随转动并输出垃圾袋。
41.如图6-12所示,所述更换装置6包括开口气缸64、安装杆61和移动杆62,在存储箱3底端的内壁上设有安装槽34,安装槽34设于储存箱3内沿推出口31水平方向设置,垃圾袋入口78位于安装槽34的中心,在垃圾袋入口78两端的安装槽34上设有安装杆61,在安装槽34的两端设有顶升气缸63,在顶升气缸63的输出端上设有开口气缸64,所述开口气缸64的输出端连接安装杆61,在储存箱3内壁上设有与安装槽34两端相对应的移动槽65,所述移动槽65自储存箱3的底部延伸至储存箱3的顶部设置,所述开口气缸64驱动安装杆61沿着安装槽34移动设置,所述顶升气缸63驱动安装杆61沿着移动槽65上下移动设置;所述安装杆61内侧设有黏胶;在另一实施例中,所述安装杆61上设有一个以上的真空吸附孔,在安装杆61内设有用于抽真空的真空电机,具体的抽真空方式为现有技术。
42.以上设置,垃圾袋开口沿着间隙76进入到储存箱3内部后,再开口气缸64输出端驱动两安装杆61沿安装槽34的方向相互靠近移动,直至两安装杆61的内侧的黏胶分别与垃圾袋开口两侧接触后,开口气缸64输出端反向驱动安装杆61沿安装槽34的方向相互远离移动,直至垃圾袋开口被打开,当安装杆61被开口气缸64驱动至移动槽65的位置后,顶升气缸63驱动安装杆61沿着移动槽65向落入口30的方向向上移动,带动垃圾袋移动向上铺设满储存箱3内部,结构简单。
43.如图8、10、11、12和15所示,所述热封装置包括热封气缸一47、热封气缸二48、热封杆一41和热封杆二42,所述热封气缸一47设置在储存箱3顶部的一侧,在热封气缸一47的输出端上设有热封杆一41,所述热封杆一41的两端向储存箱3的两端内壁延伸,并且热封杆一41两端的长度小于储存箱3两端的移动槽65之间的距离,热封气缸一47驱动热封杆一41向储存箱3的另一侧移动,储存箱3顶部的一端设有热封气缸二48,热封气缸二48在热封气缸二48的输出端上设有热封杆二42,所述热封杆二42的两端向储存箱3的两侧内壁延伸,并且热封杆二42两端的长度小于储存箱3两侧内壁之间的距离,热封气缸二48驱动热封杆二42向储存箱3的另一端移动,所述热封杆二42位于热封杆一41下方且靠近热封杆一41设置,在本实施例中,所述热封杆二42的顶面与热封杆一41的底面差距小于5mm所述储存箱3内设有红外检测装置(图中未示出);在热封杆一41远离热封杆二42的一端上设有电热阻片46。
44.以上设置,垃圾从分选箱26放入至对应的储存箱3内的垃圾袋内,当红外检测装置检测到垃圾袋装满后,热风气缸一驱动热封杆一41向储存箱3另一侧移动,在热封杆一41推动垃圾袋口从安装杆61中分离带动垃圾袋压至储存箱3另一侧,在本实施例中,黏胶的黏力
小于热封杆一41的推力,由此可以方便热封杆一41将垃圾袋推离安装杆61,进而将垃圾袋的上端部挤压在储存箱3的另一侧的内壁上,此时垃圾袋与安装杆61脱离,顶升气缸63驱动安装杆61沿着移动槽65向储存箱3底部的方向向下移动,最后,热封气缸二48驱动热封杆二42向储存箱3另一端移动并将垃圾袋推动至电热阻片46的位置上,此时垃圾袋上端部被挤压使得垃圾袋封口,再通过电热组片46进行短时间的通电,使得垃圾袋的封口进行加热压缩,从而使得封口实现融合封闭,当垃圾袋的封口融合封闭后,热封杆一41和热封杆二42恢复原位,由此实现垃圾袋的封装,结构简单。
45.如图6、7、8、10和12所示,所述推送装置5包括推送杆50、推送槽32和推送气缸(图中未示出),在储存箱3两侧的内壁上设有推送槽32,所述推送气缸设置在储存箱3中部的一端,在推送气缸的输出端上设有推送杆50,推送杆50沿着推送槽32滑动。
46.以上设置,当垃圾袋装满并被热封后,通过推送气缸输出端驱动推送杆50将垃圾袋沿推出口31推出,垃圾袋推出后推送杆50恢复至初始位置。
47.如图2-5所示,所述分类装置2还包括固定架21、分选电机22、分选联轴器23、旋转轴24和转动杆25,所述固定架21设于箱体上端,所述分选电机22固定于所述固定架21下端,所述分选联轴器23一端与分选电机22的输出端固定连接,分选联轴器23另一端与旋转轴24一端固定连接,所述旋转轴24另一端设有固定套筒27,所述转动杆25中部与固定套筒固定连接,所述转动杆25一端与分选箱26固定连接。
48.以上设置,固定在固定架21下端的分选电机22的输出端转动带动分选联轴器23同步转动,分选联轴器23转动同步带动旋转轴24转动,与旋转轴24另一端上固定套筒27固定连接的转动杆25同步转动,位于转动杆25一端固定连接的分选箱26同步转动,因此分选箱26可以位于壳体1内在储存箱3上方转动,当识别到防止在分选箱26上的垃圾类别好,驱动分选电机22旋转带动分选箱26转动至对应的垃圾类别的储存箱3上方。
49.如图14所示,所述储存箱3推出口31方向连接有垃圾箱8,所述垃圾箱8靠近储存箱3一侧设有推入口80,所述推入口80与推出口31相对设置,所述垃圾箱与推入口80相对一侧设有推拉门,垃圾箱3内设有红外传感器(图中未示出)。
50.以上设置,垃圾袋沿推出口31推出后沿推入口80进到垃圾箱8内,当垃圾箱8内的红外传感器识别到有垃圾袋进入后,发送信息至保洁人员提醒清理垃圾,保洁人员可以通过推拉门将垃圾从垃圾箱8中取出转移,整体结构简单。
51.如图16所示,在另一实施例中:一种分类垃圾桶的工作方法通过分类垃圾桶实现,具体步骤如下:(1)将单个垃圾从投放口放入分选箱中,在分选箱中识别出该垃圾种类;具体是通过分类摄像头获取分选箱内的图片,然后根据该图片与预设的垃圾图片进行比对确定该垃圾的类别,比如是厨房垃圾还是有害垃圾等,分类摄像头确定垃圾类别是现有技术;在此不再累述;(2)分选电机旋转带动分选箱转动至该垃圾分类的储存箱上方;(3)开合舵机动作带动分选板转动,垃圾掉入到储存箱内;(4)当检测到垃圾袋装满后;(4.1)在热封杆一推动垃圾袋口从安装杆中分离带动垃圾袋压至储存箱另一侧,进而将垃圾袋的上端部挤压在储存箱的另一侧的内壁上;
(4.2)顶升气缸驱动安装杆沿着移动槽向储存箱底部的方向向下移动恢复原位;(4.3)热封气缸二驱动热封杆二向储存箱另一端移动并将垃圾袋推动至点热阻片的位置上;(4.4)电热组片进行短时间的通电,使得垃圾袋的封口进行加热压缩,从而使得封口实现融合封闭;(5)最后通过推送气缸输出端驱动推送杆将垃圾袋沿推出口推出,垃圾袋沿推入口进入至垃圾箱内;(6)当需要更换垃圾袋时;(6.1)在储存箱放入垃圾前,滚筒电机转动带动垃圾袋沿主动滚筒与从动滚筒之间的间隙向储存箱底部的垃圾袋入口方向移动;(6.2)通过开口气缸输出端驱动两安装杆沿安装槽的方向相互靠近移动,直至两安装杆的内侧的黏胶分别与垃圾袋开口两侧接触后,开口气缸输出端反向驱动安装杆沿安装槽的方向相互远离移动,直至垃圾袋开口被打开;(6.3)顶升气缸驱动安装杆沿着移动槽向落入口的方向向上移动,带动垃圾袋移动向上铺设满储存箱内部。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。