1.本发明属于半导体晶圆加工领域,具体涉及一种防划伤的真空吸附式晶圆取放装置及其制造方法。
背景技术:
2.随着近年来半导体产业的飞速发展,半导体芯片已经在人工智能、集成电路、导航定位和通讯系统等诸多领域中得到广泛运用,而半导体晶圆作为半导体芯片批量化生产的载体,其加工效率与加工质量也愈发受到人们的关注。半导体晶圆通常采用微机械(mems)工艺进行加工,主要包括镀膜、涂胶、光刻、腐蚀、氧化、键合与掺杂等。其中,在涂胶和光刻等工序中,为了最大程度地实现自动化生产,需要采用适当的晶圆取放装置,通过自动化控制系统和传动单元将晶圆从片盒中沿水平方向取出,完成相应加工后再将晶圆沿水平方向放回片盒或将其传递至下一道工序单元。在晶圆自动化取放过程中面临的最大问题是由于取放装置与片盒之间在竖直方向存在着微小的对准误差,在取放过程中可能会使晶圆与取放装置发生轻微的刮蹭,导致晶圆表面被划伤,产生的划痕将影响后续工艺,最终对芯片产品的性能造成负面影响。由于竖直方向的对准误差主要是由片盒加工误差与激光传感对准系统的随机误差耦合而成,其量级一般处于数十微米到数百微米之间,具有一定的随机性且难以完全避免,因此需要通过合理改进晶圆取放装置来解决晶圆划伤的问题。
3.常见的晶圆取放装置按照其工作原理划分主要可以分为机械夹持式与真空吸附式。其中,机械夹持式晶圆取放装置往往存在不易控制夹持力度和对准位置、容易造成晶圆裂片等问题。例如,中国专利“一种晶圆取放机械手”4.(cn110091340b)介绍了一种由升降机构、主臂机构、托盘和托盘支架等结构组成的晶圆取放机械手,通过托盘支架机构可以实现晶圆对准而无需借助激光传感器等辅助手段,但该发明没有考虑夹持力度控制的问题,在面对尺寸较大、厚度较薄、质地较脆的晶圆时存在裂片风险。而已有的真空吸附式晶圆取放装置虽然避免了夹持力过大而造成的裂片问题,但在片盒加工误差与激光传感对准系统的随机误差的共同作用下,夹具托盘容易与晶圆产生刮蹭而导致晶圆表面划伤。例如,中国专利“真空吸附式圆形末端夹持器”(cn111668152a)提供了一种包含本体、法兰、吸盘等结构的晶圆夹持装置。其吸盘结构采用质地较硬的合金材料制成,并且直接与晶圆表面接触,在取放过程中将会由于对准误差导致吸盘与晶圆之间产生相对滑动,存在刮伤晶圆的风险。
5.综上所述,现有技术问题是:在使用装置取放晶圆的过程中会存在裂片、划伤等问题。
技术实现要素:
6.为解决上述技术问题,本发明提出一种防划伤的真空吸附式晶圆取放装置,其特征在于,包括:机械手、传动单元、真空单元和控制单元;
7.所述机械手是所述晶圆取放装置的主体部分,包括:托盘、悬臂结构、安装定位孔、
限位台、气道气孔结构、密封板、缓冲垫圈;
8.所述托盘设置于所述机械手的前端,用于承载待取放的晶圆;
9.所述悬臂结构设置于所述机械手的中部和末尾端,用于支撑所述托盘;
10.所述安装定位孔设置于所述机械手的末尾端;
11.所述限位台设置于所述托盘和所述悬臂结构的连接处,用于在取放晶圆过程中起到限位作用;
12.所述气道气孔结构包括四个气孔与一条气道,其中三个所述气孔设置于所述托盘顶面,剩余一个所述气孔设置于所述悬臂结构尾端,四个气孔均位于气道上,所述气道设置在所示悬臂结构底面一侧,气道上设置有密封板安装凹槽;
13.所述密封板设置于所述悬臂结构底面一侧,通过焊接或胶粘的方式连接在所述悬臂结构底面的凹槽;
14.所述缓冲垫圈共有三块,分别设置于所述托盘上的三个所述气孔上方,用于取放晶圆相接触时起到缓冲和防划伤作用;
15.所述转动单元通过所述机械手末尾端的安装定位孔使用螺栓固定连接;
16.所述真空单元与所述机械手的气道气孔结构连接;
17.所述控制单元连接所述传动单元和所述真空单元,用于统一控制所述传动单元和所述真空单元。
18.优选的,所述托盘厚度、所述缓冲垫圈厚度、以及待取放晶圆厚度三者之和小于晶圆片存放盒梳齿的间距。
19.优选的,所述限位台整体呈半圆弧型,圆弧半径与待取放晶圆半径相当,所述限位台凸起高度略大于待取放晶圆厚度与缓冲垫圈厚度之和。
20.优选的,所述气道呈一条末端带有直角拐角的“y”型,所述气道是由所述悬臂结构底面开槽而形成,所述气道深度应小于所述悬臂结构厚度的二分之一,所述气道两侧还设有略宽于气道本身的凹槽,所述凹槽深度等于所述密封板厚度。
21.优选的,所述密封板整体形状与所述气道凹槽形状基本一致,呈一条末端带有直角拐角的“y”型。
22.优选的,所述缓冲垫圈均由高温硅橡胶制成,所述缓冲垫圈内部对应所述气孔位置处设有与所述气孔直径相当的通孔。
23.优选的,所述控制单元内部集成有传感系统,根据传感信息获取所述机械手当前所处的位置状态与工作状态,所述控制单元通过向所述传动单元发送水平移动、升降移动等指令,控制所述机械手的运动,通过向所述真空单元发送负压、常压等指令,吸附和释放待取放晶圆。
24.一种防划伤的真空吸附式晶圆取放装置的制造方法,其特征在于,包括以下步骤:
25.s1:选择结构稳定与可靠性强的金属材料作为机械手毛坯;
26.s2:对机械手毛坯进行线切割和打磨棱角,得到机械手的主体结构,包括:托盘、悬臂结构和密封板;
27.s3:对机械手的托盘位置进行平面铣削加工,减薄对应位置材料厚度,得到所述限位台结构;
28.s4:对所述机械手背面进行槽铣削加工,得到所述气道结构,同时在所述气道两侧
进行铣削加工得到与所述密封板相配合的凹槽结构;
29.s5:对所述机械手进行通孔钻削加工,得到所述气孔与所述安装定位孔结构;
30.s6:将所述密封板与所述气道凹槽进行装配焊接或粘接,得到气道内部气压只能通过气孔与外界相通的半密封气道;
31.s7:在所述托盘上的所述气孔位置处粘贴所述缓冲垫圈,完成所述机械手的完整加工;
32.s8:将所述机械手与所述传动单元、所述真空单元以及所述控制单元进行机械装配与电气连接,完成所述晶圆取放装置的制造。
33.本发明的有益效果:
34.1、本发明所提出的晶圆取放装置,其机械手主体部分具有一体化结构设计的特点,避免了复杂的机械加工工序与装配工序,相比于现有的绝大多数具备类似功能的机械手,具有更简易的工艺流程、更低的制造成本和更高的质量可靠性,适合大批量推广应用。
35.2、本发明所提出的晶圆取放装置,相比于现有机械夹持式的晶圆取放装置,避免了夹持力控制不当造成晶圆滑落或裂片的问题;而相比于现有真空吸附式的晶圆取放装置,本发明考虑到了机械手在取放晶圆时容易与晶圆表面产生刮蹭从而划伤晶圆的问题,在结构设计过程中增加了缓冲垫圈,可以有效起到防护晶圆划伤的作用;本发明为同类型产品的设计与改进提供了技术参考,具有较为重要的工程应用价值。
附图说明
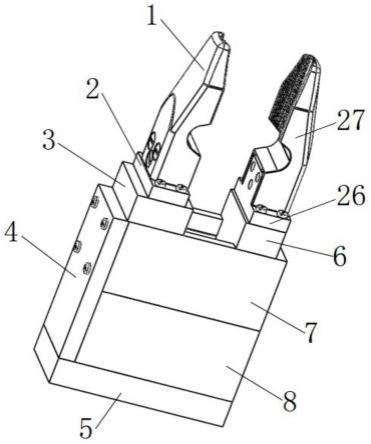
36.图1为本发明的一种防划伤的真空吸附式晶圆取放装置结构图;
37.图2为本发明的实施例中完整装配的机械手正面结构示意图;
38.图3为本发明的实施例中完整装配的机械手背面结构示意图;
39.图4为本发明的实施例中未焊接密封板的机械手背面结构示意图;
40.图5为本发明的实施例中机械手悬臂结构的横截剖面结构示意图;
41.图6为本发明的实施例中各单元间的装配与控制运行关系示意图;
42.图7为本发明的实施例中晶圆取放装置的制造工艺流程示意图;
43.图中示出:100-托盘;200-悬臂结构;310、320、330、340-安装定位孔;400-限位台;510、520、530、540-气孔;550-气道;560-气道旁凹槽结构;600-密封板;710、720、730-缓冲垫圈。
具体实施方式
44.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.一种防划伤的真空吸附式晶圆取放装置,如图1所示,其特征在于,包括:机械手、传动单元、真空单元和控制单元;
46.所述机械手是所述晶圆取放装置的主体部分,包括:托盘、悬臂结构、安装定位孔、限位台、气道气孔结构、密封板、缓冲垫圈;
47.所述托盘设置于所述机械手的前端,用于承载待取放的晶圆;
48.所述悬臂结构设置于所述机械手的中部和末尾端,用于支撑所述托盘;
49.所述安装定位孔设置于所述机械手的末尾端;
50.所述限位台设置于所述托盘和所述悬臂结构的连接处,用于在取放晶圆过程中起到限位作用;
51.所述气道气孔结构包括四个气孔与一条气道,其中三个所述气孔设置于所述托盘顶面,剩余一个所述气孔设置于所述悬臂结构尾端,四个气孔均位于气道上;
52.所述密封板设置于所述悬臂结构底面一侧,通过焊接或胶粘的方式连接在所述悬臂结构底面;
53.所述缓冲垫圈共有三块,分别设置于所述托盘上的三个所述气孔上方,用于取放晶圆相接触时起到缓冲和防划伤作用;
54.所述转动单元通过所述机械手末尾端的安装定位孔使用螺栓固定连接;
55.所述真空单元与所述机械手的气道气孔结构连接;
56.所述控制单元连接所述传动单元和所述真空单元,用于统一控制所述传动单元和所述真空单元。
57.图2和图3分别展示了本实施例中完整装配的机械手正面和背面的结构示意图,所述机械手是所述晶圆取放装置的主体部分,通过施加螺栓固定于所述传动单元,并与所述真空单元的气孔相连接,所述传动单元和所述真空单元由所述控制单元统一控制。
58.在本实施例中,所述机械手包括托盘100,悬臂结构200,四个安装定位孔310、320、330、340,限位台400,四个气孔510、520、530、540,气道550,气道旁凹槽结构560,密封板600以及三个缓冲垫圈710、720、730。其中,所述四个安装定位孔310、320、330、340统称为安装定位孔300,均为孔径相等的圆形通孔,且均与固定所用螺栓直径相匹配;所述三个缓冲垫圈710、720、730统称为缓冲垫圈700,在与待取放晶圆相接触时起到缓冲和防划伤作用,均由高温硅橡胶制成;所述四个气孔510、520、530、540的直径大小需与所述真空单元的连接气嘴以及所述缓冲垫圈700内部中空的直径大小相匹配,便于调节所述机械手内部气压从而实现对晶圆的吸附与释放;与此同时,所述四个气孔510、520、530、540,所述气道550以及所述气道旁凹槽结构560合称为气道气孔结构500。
59.更进一步地,所述托盘100设置在所述机械手的前端,用于承载待取放晶圆,所述托盘100厚度、所述缓冲垫圈700厚度、以及待取放晶圆厚度三者之和应略小于晶圆存放片盒梳齿的间距,从而确保所述取放装置承载待取放晶圆时能够在片盒梳齿间顺利进出而不会与晶圆存放片盒梳齿磕碰。所述悬臂结构200设置于所述机械手的中部和末尾端,用于支撑所述托盘100,并与所述传动单元相连接。所述安装定位孔300设置于所述机械手的末尾端,通过施加螺栓实现所述机械手与所述传动单元的定位与安装固定。
60.更进一步地,所述限位台400设置于所述托盘100和所述悬臂结构200的连接处,用于在取放晶圆过程中起到限位作用,具体地,所述限位台400整体呈半圆弧型,圆弧半径与待取放晶圆半径相当,所述限位台400凸起高度略大于待取放晶圆厚度与所述缓冲垫圈700厚度之和。
61.图4展示了本实施例中未焊接所述密封板600的机械手背面结构示意图,所述气道气孔结构500包括四个气孔与一条气道,其中三个所述气孔510、520、530设置于所述托盘
100顶面,剩余一个所述气孔540设置于所述悬臂结构200与所述传动单元的连接处。所述四个气孔510、520、530、540均通过所述气道550与所述真空单元相连接,所述气道550整体呈一条末端带有直角拐角的“y”型,所述气道550是由所述悬臂结构200底面开槽而形成,具体地,为保证所述悬臂结构200的机械强度及刚度满足使用过程中不易发生变形和损坏的要求,所述气道550截面深度应小于所述悬臂结构200整体厚度的二分之一。如图5所示,所述气道550两侧还设有略宽于气道本身的凹槽560,所述凹槽560深度等于所述密封板600厚度,用于与所述密封板600相焊接或粘接,本实施例中采用焊接的方式。
62.更进一步地,如图3所示,所述密封板600设置于所述悬臂结构200底面一侧,通过焊接的方式实现与所述悬臂结构200底面的连接,使得所述气道气孔结构500仅通过所述气孔510、520、530与外界相通,所述气孔540与所述真空单元相连接,起到密封作用,所述密封板600整体形状与所述气道凹槽560形状基本一致,呈一条末端带有直角拐角的“y”型,用于与所述气道凹槽560相焊接。
63.图6展示了本实施例中各单元间的装配与控制运行关系示意图,所述控制单元内部集成有传感系统,根据位置传感信息可以获取所述机械手当前所处的位置状态与工作状态,所述控制单元通过向所述传动单元发送水平移动、升降移动等指令,可以实现对所述机械手的运动控制;根据气压传感信息可以获取所述真空单元的工作状态,通过向所述真空单元发送负压、常压等抽放真空的指令,可以实现对待取放晶圆的吸附和释放。
64.针对本实施例中提出的一种防划伤的真空吸附式晶圆取放装置,本发明同时公开了该实施例中晶圆取放装置的制造方法,具体制造方法的工艺流程如图7所示,主要包含以下步骤:
65.步骤1:毛坯选料:选取尺寸适宜且满足结构强度与可靠性要求的金属板料作为所述机械手的毛坯,本实施例中推荐采用尺寸规格为150mm
×
100mm
×
1.5mm的马氏体不锈钢板材作为毛坯;
66.步骤2:线切割加工:通过对毛坯板材进行线切割加工并打磨棱角,得到所述机械手的主体结构轮廓,包含所述托盘100、所述悬臂结构200和所述密封板600,其中所述密封板600的厚度约为所述机械手主体厚度的三分之一,需要从较薄的毛坯板材上通过线切割获取,本实施例中推荐采用0.5mm厚的马氏体不锈钢板材;
67.步骤3:平面铣削加工:通过对所述托盘100位置进行平面铣削加工,减薄对应位置材料厚度,从而得到所述限位台结构400;
68.步骤4:槽铣削加工:通过对所述机械手背面进行槽铣削加工,得到所述气道结构550,同时通过在所述气道550两侧进行铣削加工得到与所述密封板相配合的凹槽结构560;
69.步骤5:通孔钻削加工:通过对所述机械手进行通孔钻削加工,得到所述气孔510、520、530、540与所述安装定位孔300;
70.步骤6:密封板焊接:通过将所述密封板600与所述气道凹槽560进行装配焊接,使得所述气道550内部气压仅通过所述气孔510、520、530与外界相通,所述气孔540与所述真空单元相连接,实现所述机械手的气密封;
71.步骤7:缓冲垫圈粘贴:通过在所述托盘100上的所述气孔510、520、530位置处粘贴所述缓冲垫圈700,实现所述机械手的完整加工;
72.步骤8:各单元装配:通过将所述机械手与所述传动单元、所述真空单元以及所述
控制单元进行机械装配与电气连接,即完成所述晶圆取放装置的制造。需要注意的是,所述控制单元、所述传动单元与所述真空单元通常可与涂胶机、曝光机等相应的自动化机床集成在一起,便于所述晶圆取放装置在半导体晶圆大批量加工过程中的实际应用。
73.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。