1.本发明提供了一种基于可编程的方式实现综采工作面规划开采的系统及方法,属于煤矿自动开采技术领域。
背景技术:
2.目前大多数煤矿综采工作面开采依然没有实现自动化,每一刀采煤都是人工控制支架人工控制采煤机,即采煤机向前推进,煤机前人工收护帮、喷雾,煤机后人工推溜、拉架等,人工控制支架不仅效率低容易出错,严重影响产量,还存在极大的安全隐患,针对这一问题,为提高综采工作面自动化采煤作业水平,本发明提出了一种基于可编程的方式实现综采工作面规划开采的系统及方法。
技术实现要素:
3.本发明为了解决现有煤矿综采工作面开采中人工控制液压支架和采煤机效率低容易出错,且存在极大的安全隐患的问题,提出了一种基于可编程的方式实现综采工作面规划开采的系统及方法。
4.为了解决上述技术问题,本发明采用的技术方案为:基于可编程的方式实现综采工作面规划开采的系统,包括:工艺编辑器:用于配置工艺段数据,包括工艺段动作数据和工艺段异常处理方案;工艺控制器:用于接收所述工艺编辑器配置好的数据,运行的时候通过接收的采煤机位置判断工艺段,进而执行相应的动作;电液控服务器:用于给电液控制器下发动作命令和转发所述电液控制器的状态数据;电液控制器,用于给支架控制阀发送油缸动作命令来控制对应油缸的伸缩;数据库:用于保存所述工艺控制器的工艺段配置数据和动作反馈数据。
5.所述工艺段动作数据包括:每个工艺段的液压支架的架号范围及方向,每个工艺段对应的采煤机前、后要执行的动作,每个动作相对于采煤机的触发距离,每个动作的持续时间、等待时间、成组规模、成组方向、小组规模、小组方向、小组间隔;所述工艺段异常处理方案中的异常数据包括:采煤机跳架、采煤机超速、采煤机中途往返配置。
6.所述电液控制器,用户执行电液控服务器下发的动作命令和上传当前环境数据和动作执行结果,动作的执行结果不管成功或失败都会上传给电液控服务器,然后电液控服务器广播出去;用户通过电液控服务器请求电液控制器的环境数据,电液控制器会将环境数据上传给电液控服务器。
7.所述电液控服务器,用于接收外部发送的支架动作命令和请求状态数据命令,以及用于广播电液控制器的动作反馈数据及实时数据;动作命令发给电液控服务器后,电液控服务器先检查命令的正确性和可执行性,
可执行的话将命令下发给对应的电液控制器,电液控制器执行动作,执行成功或失败反馈执行结果。
8.基于可编程的方式实现综采工作面规划开采的方法,采用基于可编程的方式实现综采工作面规划开采的系统,包括如下步骤:第一步:工艺编辑器配置工艺段、工艺段下执行的动作、工艺段异常数据;第二步:工艺编辑器下发工艺段数据给工艺控制器;第三步:工艺控制器保存工艺数据到数据库;第四步:启动自动跟机;第五步:采煤机位置传感器将采煤机位置数据发送给工艺控制器;第六步:工艺控制器根据第五步的采煤机位置查询数据库中配置好的工艺段数据;第七步:将第六步查到的数据模型按照电液控制器数据协议解析;第八步:将第七步解析出来的动作命令发送给电液控服务器;第九步:电液控服务器将动作发送给对应电液控制器,电液控制器执行动作命令;第十步:电液控制器执行动作并反馈执行结果。
9.工艺控制器根据采煤机位置和采煤机方向判断当前所在工艺段,从数据库的工艺编辑器下发过来的工艺数据中查询到应该执行的动作列表及动作属性数据,然后工艺控制器通过多线程调度模块将动作列表有序发送给电液控服务器,电液控服务器发给电液控制器负责执行动作。
10.如果执行过程中出现异常,先查询数据库中工艺编辑器事先下发过来的工艺段异常配置数据,查询到对应当前异常的处理方案,执行对应的异常处理方案。
11.所述电液控服务器接收外部发送的支架动作命令和请求状态数据命令,以及广播电液控制器的动作反馈数据及实时数据;动作命令发给电液控服务器后,电液控服务器先检查命令的正确性和可执行性,可执行的话将命令下发给对应的电液控制器,电液控制器执行动作,执行成功或失败反馈执行结果。
12.本发明相对于现有技术具备的有益效果为:本发明提供的基于可编程的方式实现综采工作面规划开采的系统实现了工艺配置与工艺控制的完美结合,全面提升了综采自动化水平;用可视化界面配置工艺段数据,方便快捷,省时省力。
附图说明
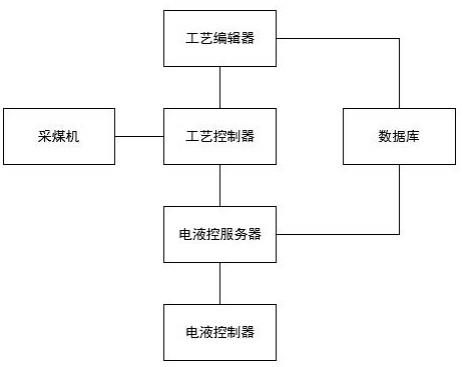
13.下面结合附图对本发明做进一步说明:图1为本发明的系统示意图。
具体实施方式
14.如图1所示,本发明提供了基于可编程的方式实现综采工作面规划开采的系统,核心组件包括:工艺编辑器、工艺控制器、电液控服务器、电液控制器、数据库。
15.工艺编辑器,用于配置工艺段数据,包括工艺段动作数据和工艺段异常处理方案。工艺段数据包括:每个工艺段的液压支架的架号范围及方向,每个工艺段对应的煤机前、后
要执行的动作,每个动作相对于采煤机的触发距离,每个动作的持续时间、等待时间、成组规模、成组方向、小组规模、小组方向、小组间隔等。
16.异常数据包括:煤机跳架、煤机超速、煤机中途往返等配置。处理方案包括采煤机处理方案(牵停、减速、不处理)、支架处理方案(退出自动跟机、不处理)。比如:工艺段一配置的异常数据为:采煤机超速,煤机处理方案:减速,支架处理方案:不处理,当采煤机速度超过设定的阈值时,就会给采煤机发送减速命令,支架处理方案就是不处理。
17.其中工艺段数据是根据工作面情况而来,根据工作面的长短、煤层形态、煤层厚度、支架类型等因素来确定哪一段是中间段,哪一段是三角煤段,以及每一个工艺段应该执行什么动作。
18.工艺段配置是在工艺编辑器里配置,先配置工艺段的支架范围,即起始架号和截止架号,比如:第一工艺段范围是50架到100架,即起始架号50架,截止架号100架,其次再配置该工艺段内要执行的动作,动作分为煤机前的和煤机后的动作,配置的参数有动作距离(触发的动作距离煤机中心的支架数量)、等待时间(触发该动作后等待多久开始执行)、执行时间(该动作执行多久)等参数。
19.工艺控制器,用于接收工艺编辑器配置好的数据和进行工艺控制,运行的时候通过接收的煤机位置判断工艺段,进而执行相应的动作。接收工艺编辑器配置好数据的流程:工艺编辑器根据工艺控制器事先定义好的协议下发工艺数据到工艺控制器,工艺控制器收到数据后将工艺数据保存在数据库。
20.工艺控制流程:采煤机位置变化后将采煤机位置发给工艺控制器,工艺控制器根据采煤机位置和采煤机方向判断当前所在工艺段,从数据库工艺编辑器下发过来的工艺数据中查询到应该执行的动作列表及动作属性数据,然后工艺控制器通过多线程调度模块将动作列表有序发送给电液控服务器,电液控服务器发给电液控制器负责执行动作。如果执行过程中出现异常,然后查询数据库中工艺编辑器事先下发过来的工艺段异常配置数据,查询到对应当前异常的处理方案,执行对应的异常处理方案。
21.通过采煤机的位置判断所处的工艺段的过程为:启动工艺段:进入自动跟机需要自选工艺段,及需要告诉工艺控制系统要从哪个工艺段进入自动跟机,然后由系统根据当前煤机位置判断是否满足进入跟机的条件(如果请求进入的工艺段配置数据的煤机范围和当前煤机位置配置即可)。跟机过程中工艺段切换:根据工艺编辑器的配置数据,煤机位置由当前工艺段的最后一架移动到下一个工艺段的第一架就认为工艺段切换到了下一个工艺段。
22.电液控服务器,用于转发电液控制器的状态数据和给电液控制器下发动作命令。
23.电液控制器,用于给支架控制阀发送油缸动作命令来控制对应油缸的伸缩。
24.数据库,用于保存工艺控制器的工艺段配置数据和动作反馈数据。
25.所述电液控服务器,用于接收外部发给它的支架动作命令和请求状态数据等命令,以及用于广播电液控制器的动作反馈数据及其他实时数据。动作命令发给电液控服务器后,电液控服务器先检查命令的正确性和可执行性,可执行的话将命令下发给对应的电液控制器,电液控制器执行动作,执行成功或失败反馈执行结果。
26.所述电液控制器,用户执行电液控服务器下发的动作命令和上传当前环境数据和动作执行结果,动作的执行结果不管成功或失败都会上传给电液控服务器,然后电液控服
务器广播出去。用户通过电液控服务器请求控制器的环境数据的话,电液控制器也会将环境数据上传给电液控服务器,环境数据包括湿度、温度、大气压强、仰角、倾角等数据。
27.所述数据库,用于保持工艺控制所需要的相关数据,包括工艺编辑器下发过来的工艺段数据、动作执行的反馈数据、采煤机运行轨迹数据等。
28.基于可编程的方式实现综采工作面规划开采的系方法的整体流程按照下述步骤进行:第一步:工艺编辑器配置工艺段、工艺段下执行的动作、工艺段异常数据;第二步:工艺编辑器下发工艺段数据给工艺控制器;第三步:工艺控制器保存工艺数据到数据库;第四步:启动自动跟机;第五步:煤机位置传感器将煤机位置数据发送给工艺控制器;第六步:工艺控制器根据第五步的煤机位置查询数据库中配置的数据模型;第七步:将第六步查到的数据模型按照电液控制器数据协议解析;第八步:将第七步解析出来的动作命令发送给电液控服务器;第九步:电液控服务器将动作发送给对应电液控制器,电液控制器执行动作命令。
29.第十步:电液控制器执行动作并反馈执行结果。
30.本发明提出了一种新的综采工作面上规划开采煤方案,即:先由工艺编辑器配置工艺段及动作,全部由可视化界面配置,方便操作;然后将数据下发给工艺控制器;通过采煤机位置传感器将采煤机位置传给工艺控制器,由工艺控制器根据配置数据去执行相应的动作。如果工作面情况发生变化,可以通过工艺编辑器修改工艺配置即可,方便高效。综上,本发明能够实现从工艺规划到支架动作的整个流程链的自动化,实现了工艺配置与工艺控制相结合。
31.关于本发明具体结构需要说明的是,本发明采用的各部件模块相互之间的连接关系是确定的、可实现的,除实施例中特殊说明的以外,其特定的连接关系可以带来相应的技术效果,并基于不依赖相应软件程序执行的前提下,解决本发明提出的技术问题,本发明中出现的部件、模块、具体元器件的型号、相互间连接方式以及由上述技术特征带来的常规使用方法、可预期技术效果,除具体说明的以外,均属于本领域技术人员在申请日前可以获取到的专利、期刊论文、技术手册、技术词典、教科书中已公开内容,或属于本领域常规技术、公知常识等现有技术,无需赘述,使得本案提供的技术方案是清楚、完整、可实现的,并能根据该技术手段重现或获得相应的实体产品。
32.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。