1.本实用新型涉及自动化设备技术领域,具体涉及拭子自动上料机。
背景技术:
2.新型冠状病毒感染导致的肺炎,传播快,其时间紧迫,随着新型冠状病毒的全球蔓延,越来越多的人民群众被感染,核酸检测技术是目前确定是否感染新冠病毒的方式之一,拭子是对民众采集检测样品的器具,因此,市场需求很大,现今拭子包装大多采用泡罩机来完成,而泡罩机的供料都是人工手工一根根的将拭子摆放在泡罩盘上,存在拭子放料速度慢,漏放,成本高,生产效率低等问题;
3.因此,需要开发一种新的设备,解决上述问题。
技术实现要素:
4.针对现有技术存在的问题,本实用新型提供拭子自动上料机。
5.为实现上述目的,本实用新型的具体方案如下:
6.本实用新型提供拭子自动上料机,包括机架,所述机架前方设有备料机构,所述机架上设有第一气缸驱动的上料机构,所述上料机构上方设有由第二气缸驱动的切料机构,所述机架左后方设有机械手,所述机械手上安装有变距模组,所述变距模组上安装有夹取机构;所述机械手、第一气缸、第二气缸、变距模组、夹取机构分别与plc电连接。
7.进一步的,所述备料机构由不锈钢薄板钣金加工而成,形状为一个设有顶盖的长方形盒子,固定在机架的前方,用来叠放拭子排。
8.进一步的,所述上料机构设有两套,并列排放,所述上料机构底部设有第一气缸、两条平行的直线导轨;所述直线导轨上设有增高垫块,所述增高垫块上设有一块上料盘底板;所述上料盘底板下面正中设置有一块气缸连接板,所述气缸连接板通过浮动接头和所述第一气缸的驱动杆相连,所述上料盘底板前面设有切刀下模块,所述切刀下模块后面设有拭子上料盘;所述切刀下模块下前方设有废料收集槽,所述切刀下模块上设有拭子限位条。
9.进一步的,所述拭子上料盘上开设有若干等间距的凹槽,所述凹槽中心距和拭子排两相邻拭子中心距相等,所述拭子上料盘可以一次放置两板拭子排。
10.进一步的,所述切料机构设有四套,每套上料机构上方设有两套;对应拭子上料盘上的两板拭子排;所述切料机构通过第二气缸锁在横梁上,所述第二气缸的驱动杆上设有安装板,所述安装板上设有切刀,所述安装板上还设有优力胶压条。
11.进一步的,所述机械手为四轴机械手。
12.进一步的,所述变距模组安装在所述机械手上,所述变距模组由若干滑块组成,所述滑块由变距气缸推动,所述变距气缸收紧时,所述滑块依次向左移动,一块叠加一块,相邻滑块的中心距和拭子排相邻拭子中心距相等;所述变距气缸伸长时,所述滑块依次向右移动展开,此时相邻滑块中心距和拭子泡罩包装机相邻凹槽的中心距相等。
13.进一步的,所述夹取机构由若干气动夹爪组成,每一气动夹爪分别安装在一个所述滑块上。
14.进一步的,所述拭子自动上料机还设置有机械手防护机构,所述机械手防护机构分为两部分,一部分直接装在机架上,是机台的机罩,正视为门字结构;另一部分装在机台后面,俯视为l型结构;
15.机械手防护机构由不锈钢钣金做框架,全透明亚克力板做窗口,将机械手整个运动范围全包裹,防止人员在机器运行时被机械手碰伤。
16.采用本实用新型的技术方案,具有以下有益效果:
17.1.通过设置的切料机构,实现机器对拭子排的自动切料,节省了人工和简化了上料的过程;
18.2.通过设置的两个放料位,依次交替的给机械手进行供料,来达到机械手不停的进行取料放料,提高了机械手每日的放料次数,进而提高了拭子泡罩包装机的产能;
19.3.通过机械手上安装若干个气动夹爪,实现了一次放料一排多根拭子的目的,有效的提高了拭子泡罩包装机的放料速度,进而提高了生产产能;
20.4.通过机械手上安装的气动夹爪和滑块,自动调整间距,适应不同的拭子排。
附图说明
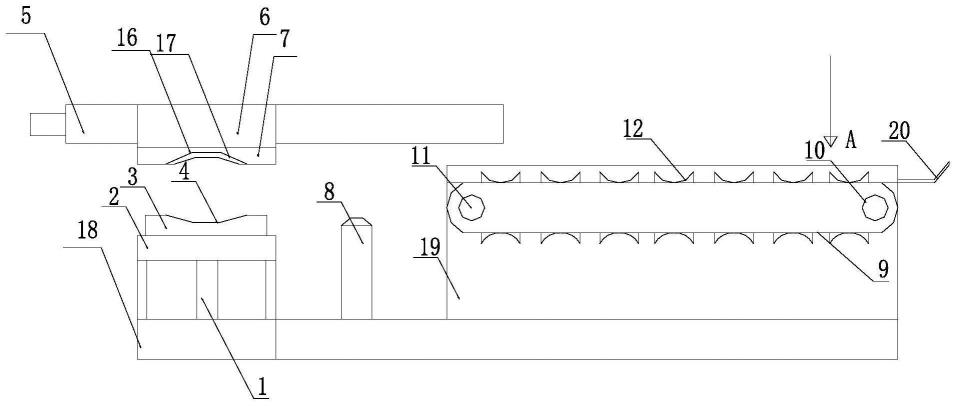
21.图1为本发明的正视图;
22.图2为本发明的俯视图;
23.图3为上料机构示意图,其中3(a)为正视图,3(b)为左视图;
24.图4为切料机构示意图,其中4(a)为正视图,4(b)为左视图;
25.图5为变距模组示意图;
26.图6为夹取机构示意图,其中6(a)为正视图,6(b)为左视图;
27.图7为拭子排示意图;
28.图8为拭子泡罩包装机纸膜示意图。
29.图中:1、机架;2、一号上料机构;3、一号按钮开关;4、机械手;5、备料机构;6、二号上料机构;7、切料机构;8、二号按钮开关;9、机械手防护机构第一部分;10、机械手防护机构第二部分;11、变距模组;12、机械手一号放料位;13、机械手二号放料位;14、机械手待机位;15、机械手二号取料位;16、二号人工上料位;17、机械手一号取料位;18、一号人工上料位;19、第一气缸;20、直线导轨;21、上料盘底板;22、拭子上料盘; 23、切刀下模块;24、拭子限位条;25、废料收集槽;26、增高垫块;27、第二气缸;28、安装板;29、固定板;30、切刀;31、优力胶压条;32、对接头;33、变距气缸;34、滑块;35、等距块;36、夹取机构整体安装板; 37、气动夹爪;38、白色赛钢爪子;39、单根拭子;40、拭子排上相邻拭子的中心距;41、拭子排横杆;42、拭子泡罩包装机的纸膜凹槽的中间距;43、纸膜上放拭子的凹槽。
具体实施方式
30.下面结合附图和实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部结构。
31.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
32.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
33.在本实施例的描述中,术语“上”、“下”、“前”、“后”、“左”、“右”等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
34.如图1-8所示,本实用新型提供拭子自动上料机,包括机架1,所述机架1 前方设有备料机构5,所述机架1上设有第一气缸19驱动的上料机构,所述上料机构上方设有由第二气缸27驱动的切料机构7,所述机架1左后方设有机械手4,所述机械手4上安装有变距模组11,所述变距模组11上安装有夹取机构;所述机械手4、第一气缸19、第二气缸27、变距模组11、夹取机构分别与plc 电连接。
35.所述备料机构5由不锈钢薄板钣金加工而成,形状为一个设有顶盖的长方形盒子,固定在机架1的前方,用来叠放拭子排。所述上料机构设有两套,并列排放,所述上料机构底部设有第一气缸19、两条平行的直线导轨20;所述直线导轨20上设有增高垫块26,所述增高垫块26上设有一块上料盘底板21;所述上料盘底板21下面正中设置有一块气缸连接板,所述气缸连接板通过浮动接头和所述第一气缸19的驱动杆相连,所述上料盘底板21前面设有切刀下模块23,所述切刀下模块23后面设有拭子上料盘22;所述切刀下模块23下前方设有废料收集槽25,所述切刀下模块23上设有拭子限位条24。
36.所述拭子上料盘22上开设有若干等间距的凹槽,所述凹槽中心距和拭子排两相邻拭子中心距相等,所述拭子上料盘22可以一次放置两板拭子排。所述切料机构7设有四套,每套上料机构上方设有两套;对应拭子上料盘22上的两板拭子排;所述切料机构7通过第二气缸27锁在横梁上,所述第二气缸27的驱动杆上设有安装板28,所述安装板28上设有切刀30,所述安装板28上还设有优力胶压条31。所述机械手4为四轴机械手4。所述变距模组11安装在所述机械手4上,所述变距模组11由若干滑块34组成,所述滑块34由变距气缸33推动,所述变距气缸33收紧时,所述滑块34依次向左移动,一块叠加一块,相邻滑块34的中心距和拭子排相邻拭子中心距相等;所述变距气缸33伸长时,所述滑块34依次向右移动展开,此时相邻滑块34中心距和拭子泡罩包装机相邻凹槽的中心距相等。
37.所述夹取机构由若干气动夹爪37组成,每一气动夹爪37分别安装在一个所述滑块34上,所述拭子自动上料机还设置有机械手防护机构,所述机械手防护机构分为两部分,一部分直接装在机架1上,是机台的机罩,正视为门字结构;另一部分装在机台后面,俯视为l
型结构;机械手防护机构由不锈钢钣金做框架,全透明亚克力板做窗口,将机械手4整个运动范围全包裹,防止人员在机器运行时被机械手4碰伤。
38.本实用新型原理步骤如下:
39.s1:人工将拭子排叠摞在拭子备料机构5上,两名员工就位,启动机器,两个上料机构均在人工上料位,机械手4在待机位。
40.s2:1号员工将两板拭子排放入一号拭子上料盘22中摆好,拍下一号启动按钮,一号上料机构2在第一气缸19的驱动下向里移动到机械手4一号取料位;并向plc发送信号;plc接收信号通过电磁阀控制两组第二气缸27下压,优力胶压条31压住拭子,切刀30将拭子排横杠切下,落入废料收集槽25中,实现切料的目的;最后第二气缸27回升,向plc发送信号。
41.s3:plc接收信号,控制机械手4从待机位运动到一号取料位,夹取机构的 20个气动夹爪37将拭子上料盘22上的40根拭子错位夹取20根;然后机械手4运动到一号放料位,同时变距模组11张开;最后机械手4下移,气动夹爪37张开, 20根拭子落入对应的凹槽内。
42.s4:机械手4上升,变距模组11夹紧,移动到一号取料位将拭子上料盘22 中的剩下20根拭子夹取,然后机械手4运动到二号放料位,同时变距模组11张开;最后机械手4下移,气动夹爪37张开,20根拭子落入对应的凹槽内;机械手4变距模组11收紧,运动到待机位待机;同时在拭子上料盘22中的拭子被全部夹取后,上料机构退出,运动到一号人工上料位18。
43.s5:机械手4放料两次,放料位一号和二号都有拭子,此时给拭子泡罩包装机信号,拭子泡罩机运行两排,放料位一号和二号因此空出。
44.s6:在机械手4到一号取料位取两次拭子放料的同时,二号员工将两板拭子排放入拭子上料盘22中摆好,拍下二号启动按钮,二号上料机构6在第一气缸19的驱动下向里移动到切料位,并向plc发送信号;plc接收信号通过电磁阀控制另外两组第二气缸27下压,优力胶压条31压住拭子,切刀30将拭子排横杠切下,落入废料收集槽25中,实现切料的目的;最后第二气缸27回升,向plc发送信号。
45.s7:plc接收信号,控制机器手从待机位运动到二号取料位,夹取机构的 20个气动夹爪37将上料盘上的40根拭子错位夹取20根;然后机械手4运动到一号放料位,同时变距模组11张开,最后机械手4下移,气动夹爪37张开,20根拭子落入对应的凹槽内。
46.s8:机械手4上升,变距模组11夹紧,移动到二号取料位将上料盘中的剩下20根拭子夹取,然后机械手4运动到二号放料位,同时变距模组11张开;最后机械手4下移,气动夹爪37张开,20根拭子落入对应的凹槽内;机械手4变距模组11收紧,运动到待机位待机;同时在拭子上料盘22中拭子被全部夹取后,上料机构退出,运动到二号人工上料位16。
47.s9:机械手4放料两次,一号和二号放料位都有拭子,此时给拭子泡罩包装机信号,拭子泡罩包装机泡罩向前运行两排,因此一号和二号放料位空出。
48.s10:机械手4交替在一号和二号取料位取料两次,完成整个拭子自动上料机的上料过程。
49.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。