1.本实用新型涉及移动式升降车技术领域,尤其涉及一种移动式升降车超声波测距限位装置。
背景技术:
2.随着建筑技术的飞速发展,建筑行业逐渐由劳动密集型向技术密集型进行转变,在机电施工中,移动式升降车的使用变得越发频繁。其使用有利有弊,在带来施工便利和工效提升的同时,由于操作人员的使用不当,也带来了新的安全隐患:升降过程的挤压碰撞受伤、升高过高带来的高坠隐患等。
3.目前常规的避险措施为在移动式升降车的围栏角落安装限位杆附加行程开关,限位杆的长度即为限制高度。其缺点在于安装一根限位杆,无法有效避障,安装3到4根操作人员完全无法施工;并且限位杆长度一旦确定,无法自由调节,无法满足施工现场各种施工环境的实际要求。
技术实现要素:
4.本实用新型的目的是为了解决常规的避险措施为在移动式升降车的围栏角落安装限位杆附加行程开关,限位杆的长度即为限制高度。其缺点在于安装一根限位杆,无法有效避障,安装3到4根操作人员完全无法施工;并且限位杆长度一旦确定,无法自由调节,无法满足施工现场各种施工环境的实际要求的问题,而提出的一种移动式升降车超声波测距限位装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种移动式升降车超声波测距限位装置,包括小车主体,所述小车主体外表面固定连接有升降车控制装置,所述小车主体上表面设置有连接有升降架,所述升降架上表面销轴转动连接有顶板,所述顶板上表面固定连接有护栏,所述升降车控制装置内部设置有电路板,所述电路板电性连接有第一超声波测距模块、第二超声波测距模块、第三超声波测距模块、第四超声波测距模块和按键控制模块。
6.优选的,所述第一超声波测距模块、第二超声波测距模块和第三超声波测距模块分别与护栏三侧外表面靠近顶部位置固定安装,所述第四超声波测距模块与顶板外表面靠近底部位置固定安装。
7.优选的,所述按键控制模块与护栏远离第一超声波测距模块侧固定安装,且按键控制模块位于第四超声波测距模块顶部位置。
8.优选的,所述电路板配套设置有第一继电器、第二继电器、单片机和显示器,所述单片机与第一继电器、第二继电器和显示器电性连接。
9.优选的,所述单片机与第一超声波测距模块、第二超声波测距模块、第三超声波测距模块、第四超声波测距模块和按键控制模块电性连接。
10.与现有技术相比,本实用新型的优点和积极效果在于,
11.1、本实用新型提出一种移动式升降车超声波测距限位装置,运用3路超声波测距模块实时监测移动式升降车距上方障碍物最小距离,距离达到报警值时声光警报器工作,警示操作人员,距离达到危险值时,限位装置控制移动式升降车停止上升;通过1路超声波测距模块监测升高车距离地面高度,达到高度阀值时,升高车停止上升。
12.2、本实用新型提出一种移动式升降车超声波测距限位装置,其中报警值、危险值、高度阀值均可通过按键模块自由设置,lcd1602液晶显示模块可显示移动式升降车距障碍物最小距离、升高高度,超声波测距限位装置仅与移动式升降车控制回路连接,即用即装,安装拆除便捷,可在不影响移动式升降车人员操作与使用前提下,减少操作人员安全隐患。
附图说明
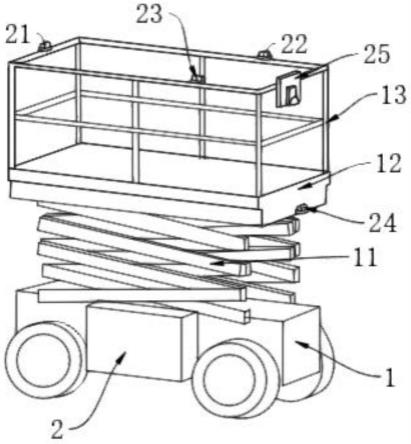
13.图1为本实用新型提出一种移动式升降车超声波测距限位装置的整体示意图结构示意图;
14.图2为本实用新型提出一种移动式升降车超声波测距限位装置的电路板结构示意图;
15.图3为本实用新型提出一种移动式升降车超声波测距限位装置的电路原理图;
16.图4为本实用新型提出一种移动式升降车超声波测距限位装置的控制原理流程图。
17.图例说明:1、小车主体;11、升降架;12、顶板;13、护栏;2、升降车控制装置;20、电路板;21、第一超声波测距模块;22、第二超声波测距模块;23、第三超声波测距模块;24、第四超声波测距模块;25、按键控制模块;26、第一继电器;27、第二继电器;28、单片机;29、显示器。
具体实施方式
18.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和实施例对本实用新型做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
19.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开说明书的具体实施例的限制。
20.实施例1,如图1-4所示,一种移动式升降车超声波测距限位装置,包括小车主体1,小车主体1外表面固定连接有升降车控制装置2,小车主体1上表面设置有连接有升降架11,升降架11上表面销轴转动连接有顶板12,顶板12上表面固定连接有护栏13,升降车控制装置2内部设置有电路板20,电路板20电性连接有第一超声波测距模块21、第二超声波测距模块22、第三超声波测距模块23、第四超声波测距模块24和按键控制模块25。第一超声波测距模块21、第二超声波测距模块22和第三超声波测距模块23分别与护栏13三侧外表面靠近顶部位置固定安装,第四超声波测距模块24与顶板12外表面靠近底部位置固定安装。按键控制模块25与护栏13远离第一超声波测距模块21侧固定安装,且按键控制模块25位于第四超声波测距模块24顶部位置。电路板20配套设置有第一继电器26、第二继电器27、单片机28和显示器29,单片机28与第一继电器26、第二继电器27和显示器29电性连接。单片机28与第一
超声波测距模块21、第二超声波测距模块22、第三超声波测距模块23、第四超声波测距模块24和按键控制模块25电性连接。
21.其整个实施例达到的效果为,4组超声波模块电路触发及回响信号(pa0、pa1)、(pa4、pa5)、(pa6、pa7)、(pa11、pa12)输入stm32f103c8t6单片机核心板,收集移动式升降车距上方障碍物距离及距地面高度信息;1组按键电路信号(pc13、pc14、pc15)输入单片机核心板,控制超声波限位装置预设值a(高度阀值)、b(报警值)、c(危险值);stm32f103c8t6单片机核心板处理超声波模块电路触发及回响信号,输出pb5~15信号给1602液晶显示电路,显示移动式升降车距障碍物最小距离、升高高度数据;单片机核心板输出pa8、pa15信号至继电器电路1、2;所有电路电源由1个5v直流电源提供,按键电路s1、s2、s3,s1和s2步进10mm加减调节a(高度阀值)、b(报警值)、c(危险值)预设值,s3为选择按钮,并设置单片机核心板记录每次调节数据,掉电不丢失,自动保存设置。
22.stm32f103c8t6单片机核心板,输入4组超声波模块电路触发、回响信号,配置定时器计时,通过超声波触发和回响信号时间差计算进行测距,测试距离=(高电平时间*声速(340m/s))/2,选用hc-sr04超声波模块,盲区为2cm,测距精度3mm。
23.单片机核心板输出pa8信号至继电器电路1,控制自带声光警报器开启关闭;输出pa15信号至继电器电路2,控制移动式升降车上升及移动回路开断。
24.超声波限位模块与移动式升降车完全独立,仅通过继电器电路2串联移动式升降车上升及移动控制回路,超声波限位模块除开断功能无法参与移动式升降车任何控制,仅做为安全保障措施使用,防止误控。
25.单片机核心板,程序录入单片机,预设对比值,输入3组距上方障碍物距离信息及一组距地面高度信息,对两类数据进行if语句判断选择,单片机输出高低电信信号控制继电器电路1、2开断,从而控制声光警报器及移动式升降车的工作状态。
26.1hc-sr04超声波测距模块:由于施工现场需求,采用hc-sr04超声波模块,其性能稳定,可提供200~4000mm的非接触式测距功能,测量精度为3mm。模块由发射器、接收器、控制电路组成,大小为45*20*15mm,由5v电源供电。
27.2限位装置主体:由stm32f103c8t6单片机核心板电路、lcd1602液晶显示电路、继电器控制电路、按键电路、5v电源、声光警报器组成控制系统,限位装置外壳采用ag型防水防尘盒满足施工现场防水防尘需求,预留接线口外接超声波模块数据线、移动式升降车控制线、预留充电口。限位装置经按键电路预设控制值,预设值可自动保存,掉电不丢失;收集4路超声波测距模块信号,经控制系统处理,输出避障距离和距地高度数据至液晶显示模块显示,输出高低电平控制信号至继电器控制电路1、2,从而控制声光警报器及移动式升降车。单片机电源按钮外接船式开关,安装于防水防尘盒上。限位装置整体呈现为盒体嵌入安装液晶显示屏、电源开关、按键钮,预留充电口、数据线接口,防水防尘使用便捷。
28.3电源:整体采用5v、3600mah可充电电池统一供电,可供限位装置正常工作50小时以上。
29.4移动式升降车控制回路:移动式升降车上升及移动控制回路串联超声波测距限位装置继电器2,超声波限位模块除开断功能无法参与移动式升降车任何控制,仅做为安全保障措施使用,防止误控。
30.超声波测距限位装置安装使用流程:
31.超声波测距限位装置预留继电器接口2连接移动式升降车上升及移动控制回路,接常闭触点,继电器通电断开。将超声波测距模块1~3安装于升降车围栏四角,测量距上方障碍物距离;将超声波测距模块4安装于升降车侧边,测量距地高度。根据施工现场实际情况,通过按键模块设置报警值、危险值、高度阀值,因地制宜。通过上述步骤即可完成超声波测距限位装置安装使用,即装即用,安全便捷。
32.控制原理:
33.超声波测距限位装置,系统有4个超声波测距传感器,测距值分别为a、b、c、d,可插拔。
34.lcd1602液晶实时显示a(距地高度)以及(b、c、d)的最小值m(距障碍物最小距离)以及a(高度阀值)、b(报警值)、c(危险值)值。
35.在a(距地高度)≥a(高度阀值)的情况下,继电器1闭合(声光警报器工作),继电器2断开(升降车停止上升)。升降车达到升高高度阀值,禁止继续上升。
36.在a(距地高度)<a(高度阀值)的情况下:
37.如果m(距障碍物最小距离)≥b(报警值),则继电器1断开(声光警报器不工作),继电器2闭合(允许升降车继续上升)。此情况下,升降车正常使用
38.在c(危险值)<m(距障碍物最小距离)<b(报警值)的情况下,则继电器1闭合(声光警报器工作),继电器2闭合(允许升降车继续上升)。此情况下,距离上方障碍物达到报警距离,声光警报器工作提醒操作人员注意上方障碍物
39.在0≤m(距障碍物最小距离)≤c(危险值)的情况下,则继电器1闭合(声光警报器工作),继电器2断开(升降车停止上升)。此情况下,继续上升会带来操作人员挤压受伤,限位装置控制升降车停止上升。此时,声光警报器持续报警,升降车无法移动和升高,只能进行下降操作。
40.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。