1.本实用新型公开了一种悬臂式双工位搅拌摩擦焊接设备,涉及水利工程施工自动控制领域。
背景技术:
2.轻量铝合金电池托盘作为新能源汽车的主要零部件之一,其生产规模也处于快速增长阶段,而搅拌摩擦焊作为轻量铝合金首选的连接技术,在汽车工业领域也得到了广泛的关注和应用。
3.现有电池托盘焊接产线主要采用多台龙门搅拌摩擦焊接设备并联或使用机器人设备焊接的布局方式,但多台龙门搅拌摩擦焊接设备并联方式占地面积大,柔性较差;机器人设备本身刚性不足,无法满足焊缝焊接质量,同时由于产品的多样化,导致工位频繁切换,自动化、智能化程度低,严重降低了生产效率。
技术实现要素:
4.本实用新型针对上述背景技术中的缺陷,提供一种悬臂式双工位搅拌摩擦焊接设备,工装平台模块化设计,切换便捷,提高了生产效率。
5.为实现上述目的,本实用新型采用的技术方案如下:一种悬臂式双工位搅拌摩擦焊接设备,包括床身、立柱、横梁、大溜板、小溜板、机头、左工作平台和右工作平台,所述左工作平台和右工作平台分别连接在床身左右两侧,所述的床身上连接立柱,立柱通过第一驱动机构在床身上方前后移动,所述的立柱上连接横梁,横梁通过第二驱动机构在立柱上左右移动,所述的横梁上连接大溜板,大溜板通过第三驱动机构在横梁上左右移动,所述大溜板上连接小溜板,小溜板通过第四驱动机构在大溜板上上下移动,所述的小溜板上连接机头。
6.进一步的,所述机头包括:主轴及焊接倾角调整装置;主轴及焊接倾角调整装置连接在小溜板上;主轴通过可旋转轴与机架连接,通过焊接倾角调整装置的调节实现主轴相对与机架的小倾角摆动,以满足焊接作业对主轴角度的需要。
7.进一步的,所述左工作平台和右工作平台分别通过若干连接梁固定在床身左右两侧,连接梁之间相互平行设置,床身与左、右工作平台之间设置3~5组连接梁,在床身在两侧设计有与床身通长的安装面及矩阵螺纹孔,通过螺钉、调节垫片和上下腰型孔设计的连接梁进行连接床身,连接梁的另一端按需定制,来实现和不同工作平台的匹配。
8.进一步的,所述第一驱动机构采用齿轮齿条驱动机构,所述的齿轮齿条驱动机构包括:双电机齿轮减速装置,安装在立柱两侧,双电机齿轮减速装置提供动力,配合床身的底座上对称分布的正向两条导轨和侧向两条,总共四条导轨带动立柱前后运动,每条导轨安装有3个滑块。
9.进一步的,所述第二驱动机构、第三驱动机构和第四驱动机构采用滚珠丝杠驱动动装置,所述第二驱动机构的丝杠安装在横梁上,通过水平方向上相互平行安装在立柱上
的两条导轨,带动横梁左右移动,每条导轨安装有4个滑块;所述第三驱动机构的丝杠安装在横梁上,通过正侧、上侧两条相互垂直安装在横梁上的两条导轨,带动大溜板左右移动,每条导轨安装有2个滑块;所述第四驱动机构的丝杠安装在大溜板上,通过竖直方向上相互平行安装在大溜板上的两条导轨,带动小溜板和机头上下移动,每条导轨安装有2个滑块。
10.有益效果:1.本实用新型床身刚性强,其两侧可设计拼接接口,可根据实际需要加长,并增加工作平台的数量,可扩展同位双机头、多工位多横梁的布局形式,可实现多块工件同时装夹焊接成型,智能化自动化程度高,极大的提升加工效率。
11.2. 本实用新型整体悬臂式结构,可悬臂横梁结构增加圆环形截面支撑,极高的增强了横梁的抗弯抗扭性能,并且可通过第二驱动装置改变悬伸长度,进行工位切换,灵活性强,柔性较高,占地面积较小;
12.3. 本实用新型工作平台模块化设计,更换便捷,并可以取消替换为落地式工装,具有更好的产品适应性。
附图说明
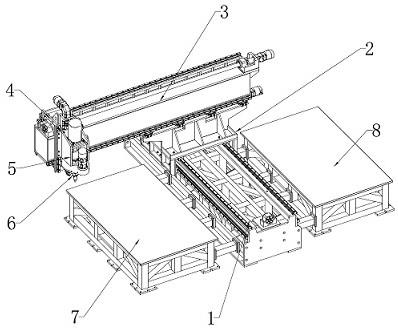
13.图1为本实用新型整体结构示意图;
14.图2为本实用新型俯视图;
15.图3为本实用新型主视图;
16.图4为本实用新型左视图;
17.图5为本实用新型扩展布局示意图。
具体实施方式
18.下面结合附图对技术方案的实施作进一步的详细描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
19.如图1~5所示的一种实施例:一种悬臂式双工位搅拌摩擦焊接设备,包括床身1、立柱2、横梁3、大溜板4、小溜板5、机头6、左工作平台7和右工作平台8,所述左工作平台7和右工作平台8分别连接在床身1左右两侧,所述的床身1上连接立柱2,立柱2通过第一驱动机构9在床身1上方前后移动,所述的立柱2上连接横梁3,横梁3通过第二驱动机构11在立柱2上左右移动,所述的横梁3上连接大溜板4,大溜板4通过第三驱动机构10在横梁3上左右移动,所述大溜板4上连接小溜板5,小溜板5通过第四驱动机构12在大溜板4上上下移动,所述的小溜板5上连接机头6。
20.所述机头6包括:主轴14及焊接倾角调整装置15;主轴14及焊接倾角调整装置15连接在小溜板5上;主轴14通过可旋转轴与机架连接,通过焊接倾角调整装置15的调节实现主轴14相对与机架的小倾角摆动,以满足焊接作业对主轴14角度的需要。
21.所述左工作平台7和右工作平台8分别通过若干连接梁13固定在床身1左右两侧,连接梁13之间相互平行设置,床身1与左、右工作平台8之间设置3~5组连接梁13,在床身1在两侧设计有与床身1通长的安装面及矩阵螺纹孔,通过螺钉、调节垫片和上下腰型孔设计的连接梁13进行连接床身1,连接梁13的另一端按需定制,来实现和不同工作平台的匹配。
22.所述第一驱动机构9采用齿轮齿条驱动机构,所述的齿轮齿条驱动机构包括:双电机齿轮减速装置,安装在立柱2两侧,双电机齿轮减速装置提供动力,配合床身1的底座上对
称分布的正向两条导轨和侧向两条,总共四条导轨带动立柱2前后运动,每条导轨安装有3个滑块。
23.所述第二驱动机构11、第三驱动机构10和第四驱动机构12采用滚珠丝杠驱动动装置,所述第二驱动机构11的丝杠安装在横梁3上,通过水平方向上相互平行安装在立柱2上的两条导轨,带动横梁3左右移动,每条导轨安装有4个滑块;所述第三驱动机构10的丝杠安装在横梁3上,通过正侧、上侧两条相互垂直安装在横梁3上的两条导轨,带动大溜板4左右移动,每条导轨安装有2个滑块;所述第四驱动机构12的丝杠安装在大溜板4上,通过竖直方向上相互平行安装在大溜板4上的两条导轨,带动小溜板5和机头6上下移动,每条导轨安装有2个滑块。
24.本实用新型床身刚性强,两侧设计有拼接接口,可根据实际需要加长,并增加工作平台的数量,可扩展同位双机头、多工位多横梁的布局形式,可实现多块工件同时装夹焊接成型,智能化自动化程度高,极大的提升加工效率;机头刚性好,使用维修方便;
25.本实用新型整体悬臂式结构,灵活性强,柔性较高,占地面积较小;
26.本实用新型工作平台模块化设计,更换便捷,并可以取消替换为落地式工装,具有更好的产品适应性。
27.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
