1.本发明涉及一种投喂装置,尤其涉及一种鱼池养殖用饲料投喂装置。
背景技术:
2.随着水产养殖业的不断发展,人工养殖无论在规模上还是数量上都在日渐扩大,面临着环境管理、投喂管理和病防管理等一系列工作量的增多,人力资源极具短缺,急需一套机械化的管理模式,尤其是饲料投喂管理方面工作量大,传统的人工投喂不仅劳动强度大,而且影响投喂饲料的质量。
3.专利申请cn204482729u,公开日为2015年07月22日,公开了一种养鱼池投喂装置,包括螺旋投喂管,所述螺旋投喂管可自由转动,螺旋投喂管通过管道连接鼓风机,管道的水平处设有进料口,所述进料口与储料罐相连,所述进料口处的管道有适当的膨胀,当需要喂食时,只需开启鼓风机,在气流的作用下将饲料送至螺旋投喂管处,螺旋投喂管在气流作用下旋转,将饲料分散投入水池,该养鱼池投喂装置结构简单,设计巧妙,能将饲料分散投入水池,提高饲料投喂面,使饲料分布均匀,但是该养鱼池投喂装置只能通过手动操控,不适用于较大面积的鱼池进行饲料投喂。
4.因此现在研发一种可以代替传统的人工投喂,节省人工劳动力的鱼池养殖用饲料投喂装置。
技术实现要素:
5.为了克服现有设备只能通过手动操控,不适用于较大面积的鱼池进行饲料投喂的缺点,本发明的技术问题:提供一种可以代替传统的人工投喂,节省人工劳动力的鱼池养殖用饲料投喂装置。
6.技术方案是:一种鱼池养殖用饲料投喂装置,包括有外壳、支撑杆、空心筒、第一推板、第一弹簧、滑块、发射机构和进料机构,外壳顶部右侧的前后两侧均固定连接有支撑杆,外壳左侧滑动式连接有第一推板,第一推板左侧滑动式连接有空心筒,第一推板左侧套有第一弹簧,第一弹簧左侧与第一推板固定连接,第一弹簧右侧与空心筒右侧固定连接,第一推板右侧固定连接有滑块,滑块位于外壳内,外壳内设有发射机构,支撑杆顶部之间设有进料机构。
7.更为优选的是,发射机构包括有伺服电机、直齿轮、齿条、第二弹簧、滑轨、第二推板、滑杆和第一楔形块,外壳内底壁后侧固定连接有伺服电机,伺服电机输出轴位于外壳内,伺服电机输出轴后侧固定连接有直齿轮,外壳右侧上部固定连接有滑轨,滑轨上滑动式连接有齿条,齿条与直齿轮啮合,外壳与齿条之间固定连接有第二弹簧,外壳内底壁左侧固定连接有滑杆,滑杆左侧滑动式连接有第二推板,第二推板与齿条左下侧接触,第二推板与滑块滑动式连接,外壳内侧壁右侧固定连接有第一楔形块。
8.更为优选的是,进料机构包括有料桶漏斗和空心软管,支撑杆顶部之间固定连接有料桶,料桶顶部放置有桶盖,料桶左下侧固定连接有漏斗,漏斗左下侧固定连接有空心软
管,空心软管下侧与空心筒上侧固定连接,第一推板位于空心软管下方的左侧。
9.更为优选的是,还包括有定时机构,外壳内的右侧设有定时机构,定时机构包括有第一棘齿轮、拉杆、第二棘齿轮、第三棘齿轮、第三弹簧、第一推杆、固定板、第二楔形块、第一丝杆和复位弹簧,外壳内底壁右侧固定连接有第一丝杆,第一丝杆前侧开有螺纹槽,螺纹槽上螺纹式连接有第三棘齿轮,第一丝杆前侧滑动式连接有拉杆,拉杆与外壳滑动式连接,拉杆上转动式连接有第二棘齿轮,第二棘齿轮后侧固定连接有卡杆,卡杆将第三棘齿轮卡住,伺服电机输出轴前侧固定连接有第一棘齿轮,第一棘齿轮与第二棘齿轮啮合,第一丝杆后侧套有第三弹簧,第三弹簧前侧与第三棘齿轮固定连接,第三弹簧后侧与第一丝杆固定连接,外壳内侧壁后部的右侧固定连接有固定板,固定板前侧转动式连接有第二楔形块,第一楔形块前侧滑动式连接有第一推杆,第二楔形块右侧与第一推杆上部转动式连接,第一推杆下侧与外壳滑动式连接,第一推杆与外壳之间固定连接有复位弹簧。
10.更为优选的是,还包括有定量机构,齿条和料桶之间设有定量机构,定量机构包括有第二推杆、第四弹簧、转杆、第五弹簧、凹形块、第一凸块和第二凸块,齿条右侧固定连接有第二推杆,料桶下部中间活动式连接有转杆,转杆上套有第五弹簧,第五弹簧下侧与转杆固定连接,第五弹簧上侧与料桶底部固定连接,料桶内下侧转动式连接有凹形块,凹形块下侧与转杆上部固定连接,凹形块顶部一侧固定连接有第一凸块,料桶侧壁固定连接有第二凸块,凹形块转动后与漏斗贴合,同时第一凸块下侧与第二凸块上侧接触,料桶下部和转杆之间固定连接有第四弹簧。
11.更为优选的是,还包括有打散机构,桶盖中间设有打散机构,打散机构包括有推块、第六弹簧、第二丝杆和导料杆,桶盖中间滑动式连接有推块,推块底部转动式连接有第二丝杆,第二丝杆与桶盖螺纹式连接,第二丝杆上套有第六弹簧,第六弹簧下侧与桶盖下部接触,第六弹簧上部与推块底部接触,第二丝杆下部均匀分布地固定连接有四根导料杆。
12.更为优选的是,还包括有角度机构,外壳顶部左侧设有角度机构,角度机构包括有第一安装块、齿板、弹簧片、第二安装块、连杆和曲柄,外壳顶部左侧中间固定连接有弹簧片,外壳顶部左侧的前后两侧均固定连接有第一安装块,第一安装块之间转动式连接有齿板,齿板底部右侧与弹簧片右侧接触,齿板顶部右侧将空心筒右下侧卡住,外壳顶部左前侧固定连接有第二安装块,第二安装块上部转动式连接有连杆,连杆后侧与空心筒固定连接,连杆前侧固定连接有曲柄。
13.更为优选的是,第一丝杆前侧开有螺纹槽。
14.本发明具有以下优点:1、本发明的第二推板向左移动复位时,空心筒内的饲料被推动快速向左移动,使得饲料被投放入鱼池,达到了省去手动抛撒饲料的工作,减少了鱼池养殖饲料投喂的工作量,节省了人工劳动力的效果。
15.2、本发明可以通过带动拉杆,调整卡杆与第三棘齿轮后侧极限位置的距离,进而调整卡杆与第三棘齿轮分离时,第三棘齿轮需要向后移动的距离,以此控制鱼池养殖用饲料投喂装置每次投放饲料的时间间隔,达到了鱼池养殖用饲料投喂装置的定时投放饲料的效果。
16.3、本发明通过用手带动拉杆向后移动,带动第二棘齿轮向后移动,使得第三棘齿轮位于后侧极限位置时,卡杆仍能够将第三棘齿轮卡住,达到了暂停鱼池养殖用饲料投喂装置投放饲料的效果。
17.4、本发明通过导料杆转动,进而对料桶内的饲料进行打散,达到了使得投放的饲料不结团的效果。
附图说明
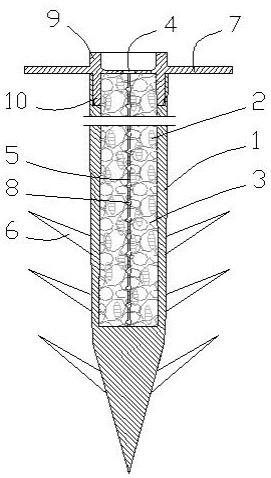
18.图1为本发明的立体结构示意图。
19.图2为本发明的第一种部分立体结构示意图。
20.图3为本发明的第二种部分立体结构示意图。
21.图4为本发明发射机构的第一种立体结构示意图。
22.图5为本发明发射机构的第二种立体结构示意图。
23.图6为本发明进料机构的立体结构示意图。
24.图7为本发明定时机构的第一种立体结构示意图。
25.图8为本发明定时机构的第二种立体结构示意图。
26.图9为本发明定量机构的第一种立体结构示意图。
27.图10为本发明定量机构的第二种立体结构示意图。
28.图11为本发明打散机构的立体结构示意图。
29.图12为本发明角度机构的立体结构示意图。
30.其中:1-外壳,2-支撑杆,3-空心筒,4-第一推板,5-第一弹簧,6-滑块,7-发射机构,70-伺服电机,71-直齿轮,72-齿条,73-第二弹簧,74-滑轨,75-第二推板,76-滑杆,77-第一楔形块,8-进料机构,80-料桶,81-漏斗,82-空心软管,9-定时机构,90-第一棘齿轮,91-拉杆,92-第二棘齿轮,93-第三棘齿轮,94-第三弹簧,95-第一推杆,96-固定板,97-第二楔形块,98-第一丝杆,99-复位弹簧,10-定量机构,100-第二推杆,101-第四弹簧,102-转杆,103-第五弹簧,104-凹形块,105-第一凸块,106-第二凸块,11-打散机构,110-推块,111-第六弹簧,112-第二丝杆,113-导料杆,12-角度机构,120-第一安装块,121-齿板,122-弹簧片,123-第二安装块,124-连杆,125-曲柄。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.实施例1一种鱼池养殖用饲料投喂装置,如图1-12所示,包括有外壳1、支撑杆2、空心筒3、第一推板4、第一弹簧5、滑块6、发射机构7和进料机构8,外壳1顶部右侧的前后两侧均固定连接有支撑杆2,外壳1左侧滑动式连接有第一推板4,第一推板4左侧滑动式连接有空心筒3,空心筒3用于给饲料导向,第一推板4左侧套有第一弹簧5,第一弹簧5左侧与第一推板4固定连接,第一弹簧5右侧与空心筒3右侧固定连接,第一推板4右侧固定连接有滑块6,滑块6位于外壳1内,外壳1内设有发射机构7,支撑杆2顶部之间设有进料机构8。
33.发射机构7包括有伺服电机70、直齿轮71、齿条72、第二弹簧73、滑轨74、第二推板75、滑杆76和第一楔形块77,外壳1内底壁后侧固定连接有伺服电机70,伺服电机70输出轴
位于外壳1内,伺服电机70用于带动整个鱼池养殖用饲料投喂装置,伺服电机70输出轴后侧固定连接有直齿轮71,外壳1右侧上部固定连接有滑轨74,滑轨74上滑动式连接有齿条72,齿条72与直齿轮71啮合,外壳1与齿条72之间固定连接有第二弹簧73,外壳1内底壁左侧固定连接有滑杆76,滑杆76左侧滑动式连接有第二推板75,第二推板75与齿条72左下侧接触,第二推板75与滑块6滑动式连接,外壳1内侧壁右侧固定连接有第一楔形块77,齿条72向右移动后与第一楔形块77左侧接触。
34.进料机构8包括有料桶80漏斗81和空心软管82,支撑杆2顶部之间固定连接有料桶80,料桶80用于盛放饲料,料桶80顶部放置有桶盖,料桶80左下侧固定连接有漏斗81,漏斗81左下侧固定连接有空心软管82,空心软管82用于给饲料导向,空心软管82下侧与空心筒3上侧固定连接,第一推板4位于空心软管82下方的左侧。
35.在使用鱼池养殖用饲料投喂装置时,初始状态下,第二推板75与齿条72接触,齿条72位于第一楔形块77左侧,齿条72与直齿轮71啮合,第一推板4位于空心软管82下方的左侧,先用手向上拿起桶盖,然后向料桶80内加入足量的饲料,并将漏斗81堵住,使得饲料不会掉落,再将桶盖放回料桶80顶部复位,重复以上操作即可对料桶80内的饲料进行补充,然后启动伺服电机70,伺服电机70输出轴带动直齿轮71转动,带动齿条72向右移动,使得第二弹簧73拉伸,齿条72会逐渐移动至与第一楔形块77左侧接触,齿条72带动第二推板75向右移动,带动滑块6向右移动,第一推板4向右移动,使得第一推板4位于空心软管82下方的右侧,使得第一弹簧5压缩,此时人们不再堵住漏斗81,料桶80内的饲料进入漏斗81中,然后通过空心软管82,掉落在空心筒3内,此时饲料位于第一推板4左侧,与此同时,在第一楔形块77作用下,带动齿条72向上移动,使得第二弹簧73右侧向上移动,齿条72与直齿轮71分离,此时在第二弹簧73恢复原状的作用力下,带动齿条72沿着滑轨74上方向左移动,当齿条72移动至最左侧时,在重力作用下,齿条72向下移动复位,齿条72与直齿轮71再次啮合复位,齿条72向左侧移动时,使得第二推板75与齿条72分离,在第一弹簧5恢复原状的作用力下,带动第一推板4向左移动复位,使得第一推板4位于空心软管82下方的左侧复位,带动第二推板75向左移动复位,使得第二推板75与齿条72再次接触复位,同时使得空心筒3内的饲料被推动快速向左移动,使得饲料被投放入鱼池,从而省去了手动抛撒饲料的工作,减少了鱼池养殖饲料投喂的工作量,节省了人工劳动力。
36.还包括有定时机构9,外壳1内的右侧设有定时机构9,定时机构9包括有第一棘齿轮90、拉杆91、第二棘齿轮92、第三棘齿轮93、第三弹簧94、第一推杆95、固定板96、第二楔形块97、第一丝杆98和复位弹簧99,外壳1内底壁右侧固定连接有第一丝杆98,第一丝杆98前侧开有螺纹槽,螺纹槽上螺纹式连接有第三棘齿轮93,第一丝杆98前侧滑动式连接有拉杆91,拉杆91与外壳1滑动式连接,拉杆91上转动式连接有第二棘齿轮92,第二棘齿轮92后侧固定连接有卡杆,卡杆将第三棘齿轮93卡住,第三棘齿轮93向后移动后与卡杆分离,伺服电机70输出轴前侧固定连接有第一棘齿轮90,第一棘齿轮90与第二棘齿轮92啮合,第一丝杆98后侧套有第三弹簧94,第三弹簧94前侧与第三棘齿轮93固定连接,第三弹簧94后侧与第一丝杆98固定连接,外壳1内侧壁后部的右侧固定连接有固定板96,固定板96前侧转动式连接有第二楔形块97,第二楔形块97用于卡住齿条72,第一楔形块77前侧滑动式连接有第一推杆95,第二楔形块97右侧与第一推杆95上部转动式连接,齿条72向右上侧移动后,齿条72右侧卡于第二楔形块97下侧,第一推杆95下侧与外壳1滑动式连接,第一推杆95与外壳1之
间固定连接有复位弹簧99。
37.在使用鱼池养殖用饲料投喂装置时,初始状态下,第三棘齿轮93位于前侧极限位置,卡杆将第三棘齿轮93卡住,齿条72右侧与第二楔形块97分离,启动伺服电机70时,伺服电机70输出轴带动第一棘齿轮90转动,带动第二棘齿轮92转动,带动卡杆做圆周运动,带动第三棘齿轮93转动,因为第一丝杆98前侧开有螺纹槽,使得第三棘齿轮93沿着螺纹槽向后移动,使得第三弹簧94发生形变,此时齿条72向右上侧移动至极限位置,齿条72右侧卡于第二楔形块97下侧,使得齿条72无法向左下侧移动复位,第三棘齿轮93转动使得第一推杆95不断向上移动,使得复位弹簧99拉伸,然后在复位弹簧99恢复原状的作用力下,带动第一推杆95向下移动复位,即第一推杆95不断上下移动,带动第二楔形块97不断转动,当第三棘齿轮93移动至后侧极限位置时,第三棘齿轮93与卡杆分离,在第三弹簧94恢复原状的作用力下,带动第三棘齿轮93沿着螺纹槽转动并向前移动复位,卡杆重新将第三棘齿轮93卡住,第三棘齿轮93沿着螺纹槽转动,带动第一推杆95向下移动,使得第二楔形块97反向转动,第二楔形块97左侧向上摆动,进而使得齿条72右侧与第二楔形块97分离,使得齿条72可以向左下侧移动复位,进行饲料投放,在以上过程中,当齿条72右侧卡于第二楔形块97下侧,使得齿条72无法向左下侧移动复位时,鱼池养殖用饲料投喂装置停止投放饲料,因此需要暂停鱼池养殖用饲料投喂装置投放饲料时,只需用手带动拉杆91向前移动,带动第二棘齿轮92向前移动,使得第三棘齿轮93位于前侧极限位置时,卡杆始终于第三棘齿轮93分离,进而达到暂停鱼池养殖用饲料投喂装置投放饲料的效果,同时,可以通过带动拉杆91,调整卡杆与第三棘齿轮93后侧极限位置的距离,进而调整卡杆与第三棘齿轮93分离时,第三棘齿轮93需要向后移动的距离,以此控制鱼池养殖用饲料投喂装置每次投放饲料的时间间隔,进而实现鱼池养殖用饲料投喂装置的定时投放饲料。
38.还包括有定量机构10,齿条72和料桶80之间设有定量机构10,定量机构10包括有第二推杆100、第四弹簧101、转杆102、第五弹簧103、凹形块104、第一凸块105和第二凸块106,齿条72右侧固定连接有第二推杆100,料桶80下部中间活动式连接有转杆102,第二推杆100向右移动后与转杆102接触,转杆102上套有第五弹簧103,第五弹簧103下侧与转杆102固定连接,第五弹簧103上侧与料桶80底部固定连接,料桶80内下侧转动式连接有凹形块104,凹形块104下侧与转杆102上部固定连接,凹形块104顶部一侧固定连接有第一凸块105,料桶80侧壁固定连接有第二凸块106,凹形块104转动后与漏斗81贴合,同时第一凸块105下侧与第二凸块106上侧接触,料桶80下部和转杆102之间固定连接有第四弹簧101。
39.在使用鱼池养殖用饲料投喂装置时,初始状态下,第二推杆100与转杆102分离,第一凸块105下侧与第二凸块106上侧分离,向料桶80内加入饲料时,饲料落在凹形块104上,凹形块104与漏斗81错位,使得料桶80内的饲料无法掉入漏斗81中,当齿条72向右上侧移动时,带动第二推杆100向右上侧移动,进而带动转杆102转动,第四弹簧101拉伸,第五弹簧103发生形变,带动凹形块104转动,凹形块104与漏斗81贴合,在重力作用下,凹形块104上的饲料进入漏斗81中,使得第一凸块105做圆周运动,第一凸块105下侧与第二凸块106上侧接触,使得第一凸块105向上移动,带动凹形块104向上移动,使得转杆102向上移动,此时第二推杆100与转杆102分离,在第四弹簧101恢复原状的作用力下,带动转杆102和凹形块104转动复位,从而带动第一凸块105做反向圆周运动复位,第一凸块105下侧与第二凸块106上侧分离复位,同时,在第五弹簧103恢复原状的作用力下,带动转杆102向下移动复位,带动
凹形块104向下移动复位,进而带动第一凸块105向下移动复位,而在第二推杆100向左侧复位时,会将转杆102向上推动,第五弹簧103被压缩,使得第二推杆100可以顺利通过转杆102,之后在第五弹簧103的作用下,转杆102向下复位,在以上过程中,通过凹形块104与漏斗81的贴合与错位,进而控制饲料是否进入漏斗81中,同时,通过第二凸块106对第一凸块105产生影响,使得转杆102向上移动,进而与第二推杆100分离,从而限制凹形块104与漏斗81贴合的时间,达到定量投放饲料的效果。
40.还包括有打散机构11,桶盖中间设有打散机构11,打散机构11包括有推块110、第六弹簧111、第二丝杆112和导料杆113,桶盖中间滑动式连接有推块110,推块110底部转动式连接有第二丝杆112,第二丝杆112与桶盖螺纹式连接,第二丝杆112上套有第六弹簧111,第六弹簧111下侧与桶盖下部接触,第六弹簧111上部与推块110底部接触,第二丝杆112下部均匀分布地固定连接有四根导料杆113,导料杆113用于打散饲料。
41.在使用鱼池养殖用饲料投喂装置时,初始状态下,推块110位于上侧极限位置,向料桶80内补充完饲料后,先用手向下按动推块110,带动第二丝杆112向下移动,带动导料杆113均向下移动,在桶盖作用下,使得第二丝杆112转动,第六弹簧111压缩,带动导料杆113均转动,然后松手,在第六弹簧111恢复原状的作用力下,带动第二丝杆112转动复位,在桶盖作用下,使得第二丝杆112向上移动复位,带动导料杆113均向上移动复位,同时带动导料杆113均反向转动复位,进而对料桶80内的饲料进行打散,达到了使得投放的饲料不结团的效果。
42.还包括有角度机构12,外壳1顶部左侧设有角度机构12,角度机构12包括有第一安装块120、齿板121、弹簧片122、第二安装块123、连杆124和曲柄125,外壳1顶部左侧中间固定连接有弹簧片122,外壳1顶部左侧的前后两侧均固定连接有第一安装块120,第一安装块120之间转动式连接有齿板121,齿板121底部右侧与弹簧片122右侧接触,齿板121顶部右侧将空心筒3右下侧卡住,外壳1顶部左前侧固定连接有第二安装块123,第二安装块123上部转动式连接有连杆124,连杆124后侧与空心筒3固定连接,连杆124前侧固定连接有曲柄125。
43.在使用鱼池养殖用饲料投喂装置时,初始状态下,齿板121顶部最右侧将空心筒3右下侧卡住,齿板121底部右侧与弹簧片122右侧接触,在弹簧片122作用下,使得齿板121右侧顶部将空心筒3右下侧卡得更牢固,当需要调节鱼池养殖用饲料投喂装置的投放角度时,用手转动曲柄125,带动连杆124转动,使得空心筒3转动,进而使得空心筒3右下侧与齿板121顶部最右侧错位,使得空心筒3右下侧向左移动,齿板121右侧向下移动,弹簧片122发生形变,调整到合适的角度后,松手,在弹簧片122恢复原状的作用力下,带动齿板121右侧向上移动,再次将空心筒3右下侧卡住,然后用手向下推动齿板121右侧,使得弹簧片122发生形变,使得空心筒3右下侧与齿板121分离,然后转动曲柄125复位,曲柄125带动连杆124转动复位,使得空心筒3转动复位,然后松开手,在弹簧片122恢复原状的作用力下,带动齿板121右侧向上移动,齿板121最右侧再次将空心筒3右下侧卡住复位,通过以上操作,即可对饲料的投放角度进行调整。
44.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。