1.本发明涉及农业机械装备领域,特别是一种饲料收获机动定刀间隙自动调整装置。
背景技术:
2.随着我国畜牧产业的发展,用户对饲料收获机的要求也越来越严格,在功能、可靠性、效率等方面均与进口机器进行比较,这就迫使饲料收获机在设计研发过程中,除要提高关键零部件可靠性和整机质量外,还需要考虑降低操作者劳动强度和提高机器工作效率,更需要向着自动化、智能化方向发展,提高产品性能和市场竞争力。
3.目前,国内各饲料收获机都逐渐具备自动磨刀功能,但磨刀后,刀刃短了,定刀与动刀之间的间隙变大,切段效果(切碎质量)不好,尤其玉米蜡熟期后玉米棒的包衣韧性大,可能发生切不断情况。为了弥补磨刀后的上述情况,就需要在磨刀完成后进行动定刀间隙调整,但目前还没有饲料收获机能实现动、定刀的对刀间隙的自动调整,通常采用手动机械模式调整,操作不方便,且停机时间长,迫切需要提升机器的作业效率。
技术实现要素:
4.本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种饲料收获机动定刀间隙自动调整装置及方法。
5.为解决上述技术问题,本发明是按如下方式实现的:本发明所述一种饲料收获机动定刀间隙自动调整装置,包括控制器、对称设置左侧调整装置和右侧调整装置,左侧调整装置和右侧调整装置均包括电机、减速机、转臂、爆震传感器及定刀旋转座;
6.所述定刀旋转座通过销轴可转动的连接于安装动刀的切碎滚筒机架上,定刀两端下方分别固定连接于两侧定刀旋转座的顶部;
7.所述转臂的下端前方与定刀旋转座后方固定,爆震传感器安装在转臂下端的后方;
8.电机的动力输出端固定连接减速机的动力输入端,减速机的动力输出端与丝杠的一端固定连接;旋转块的中心孔内设置有轴承,旋转块依靠内弧面靠接于切碎滚筒机架上固定的转轴上;转轴上设置径向通孔;丝杠的另一端穿过轴承内圈及通孔,并通过槽螺母与轴承内圈固定;固定在一起的丝杠、旋转块可一同沿着转轴转动固定角度;
9.减速器上固定连接着减速机支架,减速机支架下方与转臂的上端前方卡接;
10.所述转臂上端内部设置有螺纹套,丝杠与螺纹套构成螺纹传动连接。
11.左侧调整装置和右侧调整装置的工作原理是:
12.电机正转时,电机驱动减速机顺时针转,减速机将同步驱动丝杠顺时针旋转,丝杠通过螺纹套驱动转臂和定刀旋转座绕着销轴顺时针向前转动一个角度,此时定刀也将随着定刀旋转座向远离动刀的方向移动,此过程就实现了退刀。
13.电机反转时,电机驱动减速机逆时针转,减速机将同步驱动丝杠逆时针旋转,丝杠
通过螺纹套驱动转臂和定刀旋转座绕着销轴逆时针旋转,此时定刀也将随着定刀旋转座向靠近动刀的方向移动,此过程就实现了进刀。
14.在进刀过程中,当定刀与动刀相碰时,即定刀与动刀之间的间隙为0,定刀与动刀之间接触后将产生震动,此时爆震传感器将会输出震动频率信号及电压信号反馈至控制器,控制器在接收到爆震传感器的反馈的两种信号中的任意一种后将执行电机立即停止工作,并发送设定好的脉冲数至电机,让电机正转,此时定刀将随着定刀旋转座向远离动刀的方向移动固定距离,此过程就实现了定刀与动刀接触后的退刀。
15.在自动调整间隙过程中,左侧调整装置与右侧调整装置分别循环往复执行进刀动作,具体过程如下:
16.左侧调整装置首先执行进刀动作,控制器控制左侧调整装置的电机执行反转,实现左侧调整装置固定连接的定刀部位向着靠近动刀的方向移动固定距离,控制器将判断是否采集到爆震传感器的反馈信号,如采集到爆震传感器的电压或频率中任意一种信号,则控制器将左侧调整装置对应的计数单元数值置1,同时将控制左侧调整装置固定连接的定刀部位按照预设间隙退刀至固定位置;如未采集到爆震传感器的电压或频率中任意一种信号,则左侧调整装置对应的计数单元数值置0;在控制左侧调整装置执行完一次进刀动作后,控制器将控制右侧调整装置执行进刀动作;
17.右侧调整装置执行进刀动作,控制器控制右侧调整装置的电机执行反转,实现右侧调整装置固定连接的定刀部位向着靠近动刀的方向移动固定距离,控制器将判断是否采集到爆震传感器的反馈信号,如采集到爆震传感器的电压或频率中任意一种信号,则控制器将右侧调整装置对应的计数单元数值置1,同时将控制右侧调整装置固定连接的定刀部位按照预设间隙退刀至固定位置;如未采集到爆震传感器的电压或频率中任意一种信号,则右侧调整装置对应的计数单元数值置0;
18.当左侧调整装置固定连接的定刀部位、右侧调整装置固定连接的定刀部位未满足连续执行退刀过程的条件,即控制器判断出左、右侧连续对刀调整作业后,左侧调整装置对应的计数单元数值或右侧调整装置对应的计数单元数值其中有一个数值为0,控制器判定对刀未完成,其将控制左侧调整装置、右侧调整装置继续执行进刀过程;
19.当左侧调整装置固定连接的定刀部位、右侧调整装置固定连接的定刀部位分别连续执行退刀过程后,即控制器判断出左、右侧连续对刀调整作业后,左侧调整装置对应的计数单元数值及右侧调整装置对应的计数单元数值均为1,控制器判定对刀完成,这样就实现了左侧调整装置固定连接的定刀部位、右侧调整装置固定连接的定刀部位均与动刀之间保持一致的间隙,此时即完成了智能对刀过程。
20.由于饲料收获机对刀过程需在原地非作业状态执行,在执行对刀过程中需要调整发动机转速,控制动刀转动处于预设值(对刀状态下的动刀转速低于正常工作时动刀转速),因此在启动智能对刀程序前,控制器需判定发动机转速是否≤限值,同时需判定收获机是否处于原地非作业状态,即收获机上的控制前进、停止与后退的操作手柄是否触发了行走泵上的中位开关,如果控制器接收到中位开关的信号,证明操作手柄目前处于让收获机停止状态,这样做是完全处于安全作业考虑。
21.本发明的积极效果:
22.本发明所述一种饲料收获机动定刀间隙自动调整装置,首先通过控制器对发动机
转速≤限值和中位开关到位两项条件判定,均满足后才执行对刀作业,这样极大的提高了对刀的安全性。在执行自动对刀调整流程时,控制器执行左、右侧的电机依次进刀,同时检测左、右两侧爆震传感器信号,控制器检测到爆震传感器信号,即定刀与动刀之间的间隙为0;当控制器连续检测到左、右爆震传感器信号,控制器执行左、右侧的电机依次退刀到预设距离,从而确保准确达到间隙预期值,操作流程安全可靠,自动化程度高,有效降低了驾驶员的劳动强度,缩短了对刀时间,确保间隙均匀,提高间隙精准度,使得切碎的饲料品质得到提高,提高了饲料收获机的切碎质量和作业效率。
附图说明
23.下面结合附图和具体实施方式对本发明作进一步详细的说明。
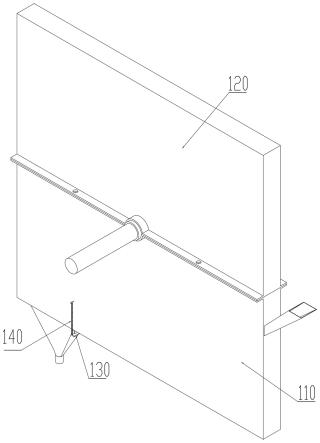
24.图1是调整装置的结构示意图;
25.图2是本发明的控制流程图。
26.图中,1丝杠、2旋转块、3槽螺母、4电机、5减速机、6减速机支架、7转臂、8定刀、9爆震传感器、10定刀旋转座、11动刀旋转轨迹、12销轴、13转轴。
具体实施方式
27.如图1所示,本发明所述一种饲料收获机动定刀间隙自动调整装置包括控制器、对称设置左侧调整装置和右侧调整装置,左侧调整装置和右侧调整装置均包括电机、减速机、转臂、爆震传感器及定刀旋转座;
28.所述定刀旋转座通过销轴可转动的连接于安装动刀的切碎滚筒机架上,定刀两端下方分别固定连接于两侧定刀旋转座的顶部;
29.所述转臂的下端前方与定刀旋转座后方固定,爆震传感器安装在转臂下端的后方;
30.电机的动力输出端固定连接减速机的动力输入端,减速机的动力输出端与丝杠1的一端固定连接;旋转块的中心孔内设置有轴承,旋转块依靠内弧面靠接于切碎滚筒机架上固定的转轴上;转轴上设置径向通孔;丝杠1的另一端穿过轴承内圈及通孔,并通过槽螺母与轴承内圈固定;固定在一起的丝杠1、旋转块可一同沿着转轴转动固定角度;
31.减速器上固定连接着减速机支架,减速机支架下方与转臂的上端前方卡接;
32.所述转臂上端内部设置有螺纹套,丝杠1与螺纹套构成螺纹传动连接。
33.图1给出了单侧调整装置的结构示意图,其中虚线位置表示调整装置绕销轴转动后位置变化的示意图。
34.如图2所示,本发明还提供了一种饲料收获机动定刀间隙自动调整装置的控制方法,其包含如下步骤:
35.s1:系统初始化设置:设置饲料收获机智能对刀操作时的发动机转速限值、每次进刀距离、智能对刀结束后预设退刀距离、爆震传感器的电压阈值和频率阈值;
36.s2:执行智能对刀间隙自动调整,控制器判断发动机转速≤限值和中位开关信号是否触发,两个条件同时满足时,则开始执行自动间隙调整流程操作,否则显示器报警提示未满足条件;
37.s3:执行智能对刀间隙自动调整,控制器控制左侧调整装置与右侧调整装置分别
循环往复执行进刀动作,进刀过程中如果检测到左侧或者右侧的爆震传感器信号时,控制器立即执行停止进刀流程,并执行退刀流程至预设距离,同时被检测到爆震传感器信号一侧的调整装置对应的计数单元数值置1,未检测到爆震传感器信号一侧的调整装置对应的计数单元数值置0;如果控制器连续检测到左、右侧的爆震传感器信号,则左侧调整装置与右侧调整装置依次执行完退刀流程后智能对刀完成;如果控制器未能连续检测到左、右侧的爆震传感器信号,则左侧调整装置与右侧调整装置保持循环往复执行进刀流程。
38.考虑到调整装置平衡及传动机构平衡,左侧调整装置与右侧调整装置循环往复进行对刀,可有效防止一端调整间隙过大,引起调整装置变形。在自动调整间隙过程中,左侧调整装置与右侧调整装置分别循环往复执行进刀动作,具体情况如下:
39.情况1:
40.左侧调整装置执行进刀流程,控制器控制其进刀到预设距离,进刀过程中,控制器检测到左侧的爆震传感器信号,立即执行左侧调整装置停止进刀流程,执行退刀流程至预设距离,同时左侧调整装置对应的计数单元数值置1;然后,控制器执行右侧调整装置执行进刀流程,进刀过程中,控制器检测到右侧的爆震传感器信号,立即执行右侧调整装置停止进刀流程,执行退刀流程至预设距离,同时右侧调整装置对应的计数单元数值置1;此时控制器连续检测到左侧调整装置及右侧调整装置上爆震传感器输出信号时,动定刀间隙自动调整流程结束。
41.情况2:
42.左侧调整装置执行进刀流程,控制器控制其进刀到预设距离,进刀过程中,控制器检测到左侧的爆震传感器信号,立即执行左侧调整装置停止进刀流程,执行退刀流程至预设距离,同时左侧调整装置对应的计数单元数值置1;
43.然后,控制器执行右侧调整装置执行进刀流程,待右侧调整装置执行的进刀流程结束后,控制器未检测到右侧的爆震传感器信号,右侧调整装置对应的计数单元数值置0,此时控制器将继续控制左侧调整装置执行进刀流程,进刀过程中,控制器会检测到左侧的爆震传感器信号,立即执行左侧调整装置停止进刀流程,执行退刀流程至预设距离,左侧调整装置对应的计数单元数值置1;
44.然后,控制器继续执行右侧调整装置执行进刀流程,进刀过程中,控制器检测到右侧的爆震传感器信号,立即执行右侧调整装置停止进刀流程,执行退刀流程至预设距离,同时右侧调整装置对应的计数单元数值置1;
45.此时控制器连续检测到左侧调整装置及右侧调整装置上爆震传感器输出信号时(左侧调整装置对应的计数单元数值置1,同时右侧调整装置对应的计数单元数值置1),动定刀间隙自动调整流程结束;
46.如果控制器仍未检测到右侧的爆震传感器信号,控制器将控制左侧调整装置和右侧调整装置重复执行上述操作,直至控制器连续检测到左侧调整装置及右侧调整装置上爆震传感器输出信号时,动定刀间隙自动调整流程结束。
47.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。