1.本发明涉及辣椒种植技术领域,特别涉及一种辣椒种植深耕设备及其方法。
背景技术:
2.辣椒种植过程中需要使用微耕机在田地中起垄,保障辣椒苗的根部透气性,避免辣椒苗集中栽培,导致其根部土壤透气性差出现辣椒苗烂根的情况,现有专利(公告号:cn204442932u)公开微耕机。发明人在实现该方案的过程中发现现有技术中存在如下问题没有得到良好的解决:
3.1、现有设备在使用的过程中,通过锁定装置实现手把在水平方向上旋转180度,在竖直方向上无法对手把的俯仰角度进行调整,不同用户在使用该装置时需要保持弯腰姿势,长时间使用该装置进行耕地操作,对用户的腰部压力较大;2、现有设备在使用的过程中,受田地中地形复杂性限制,导致该装置在田地中的行进稳定性偏差,增加了用户对手把的抓握难度。
4.公开号为cn216626547u的中国专利公开了一种用于辣椒种植的微耕机,通过改变安装销在安装孔上的工作位置,连杆配合定位管在安装架上转动,实现连杆的俯仰角调整,完成手把的工作位置调整,匹配不同农机操作员的使用习惯,避免手把工作高度过低,导致农机操作员在操作该装置时腰部压力过大,影响该装置的持续作业能力,解决现有设备存在的手把调解不便和手把抓握不便的问题。但是上述专利存在以下缺陷:
5.前伸板的底端与支座的定端固定连接,支座上安装有翻耕刀,其翻耕刀的高度为固定的,在使用时,翻耕刀高度不能调节,只能对田地表面进行翻耕,不能对田地进行深耕,导致土壤疏松性较差,辣椒种植成活率低下。
技术实现要素:
6.本发明的目的在于提供一种辣椒种植深耕设备及其方法,利用深耕机构可对田地进行深耕,使土壤疏松性好,提高辣椒种植成活率,且深耕刀在对田地进行深耕,深耕刀可抖落泥土,避免泥土粘连,以解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:
8.一种辣椒种植深耕设备,包括车架,所述车架一端的底部设置有支架,所述支架的下端设置有转轴,所述转轴的两端安装有车轮,所述车架另一端的底部设置有深耕机构,所述深耕机构用于深耕田地。
9.进一步地,所述深耕机构包括深耕基座、联动滑座、压缩弹簧、伸缩导向柱和定位基板,所述深耕基座安装在车架的底部,所述深耕基座的内侧设置有联动滑座,所述联动滑座活动连接在深耕基座上,所述联动滑座上部的两端通过压缩弹簧和伸缩导向柱连接在定位基板上,所述压缩弹簧和伸缩导向柱的一端连接在联动滑座上,所述压缩弹簧和伸缩导向柱的另一端连接在定位基板上,所述定位基板安装在深耕基座的内壁上。
10.进一步地,所述深耕机构还包括驱动电机、驱动蜗轮、第一传动蜗杆和第二传动蜗
杆,所述驱动电机安装在联动滑座上,所述驱动电机的输出轴通过花键安装有驱动蜗轮,所述驱动蜗轮的一侧端面设置有第一传动蜗杆,所述驱动蜗轮和第一传动蜗杆啮合,所述驱动蜗轮的另一侧端面设置有第二传动蜗杆,所述驱动蜗轮和第二传动蜗杆啮合,所述第一传动蜗杆和第二传动蜗杆均通过轴承安装在联动滑座上。
11.进一步地,所述深耕机构还包括第一传动皮带、第一传动轴杆、第二传动皮带、第二传动轴杆和支撑基板,所述第一传动蜗杆通过第一传动皮带和皮带轮连接第一传动轴杆,所述第二传动蜗杆通过第二传动皮带和皮带轮连接第二传动轴杆,所述第一传动轴杆和第二传动轴杆均通过轴承安装在支撑基板上,所述支撑基板对称分布在联动滑座的两端。
12.进一步地,所述深耕机构还包括传动齿轮和固定齿条,所述第一传动轴杆和第二传动轴杆均通过花键安装有传动齿轮,所述传动齿轮的侧端面设置有固定齿条,所述传动齿轮和固定齿条啮合,所述固定齿条固定在深耕基座的内壁上。
13.进一步地,所述深耕机构还包括第三传动皮带、第三传动轴杆、驱动伞齿轮、从动伞齿轮和牵引轴杆,所述第一传动轴杆通过第三传动皮带和皮带轮连接第三传动轴杆,所述第三传动轴杆通过轴承安装在联动滑座的下端,所述第三传动轴杆通过花键安装有驱动伞齿轮,所述驱动伞齿轮和从动伞齿轮啮合,所述从动伞齿轮通过花键安装在牵引轴杆上,所述牵引轴杆通过轴承横向安装在联动滑座的下端。
14.进一步地,所述深耕机构还包括深耕刀,所述深耕刀位于联动滑座的下端,深耕刀均匀分布在牵引轴杆上。
15.进一步地,所述深耕机构还包括限位基板,所述限位基板安装在深耕基座的内壁上,限位基板位于定位基板的上方。
16.根据本发明的另一个方面,提供了一种辣椒种植深耕设备的辣椒种植深耕方法,包括如下步骤:
17.s10:驱动电机启动,驱动电机带动驱动蜗轮旋转,由于第一传动蜗杆和第二传动蜗杆均与驱动蜗轮啮合,因此驱动蜗轮在旋转的过程中,带动第一传动蜗杆和第二传动蜗杆转动;
18.s20:第一传动蜗杆转动带动第一传动皮带和第一传动轴杆转动,第二传动蜗杆转动带动第二传动皮带和第二传动轴杆转动,第一传动轴杆和第二传动轴杆在转动的过程中,带动传动齿轮旋转;
19.s30:由于传动齿轮和固定齿条啮合,且固定齿条固定在深耕基座的内壁上,因此传动齿轮在旋转的过程中,带动联动滑座在深耕基座内下移,联动滑座下移且挤压压缩弹簧和伸缩导向柱;
20.s40:联动滑座下移带动深耕刀下移,且第一传动轴杆转动带动第三传动皮带和第三传动轴杆转动,第三传动轴杆转动带动驱动伞齿轮转动,由于驱动伞齿轮和从动伞齿轮啮合,因此驱动伞齿轮转动带动从动伞齿轮、牵引轴杆和深耕刀转动,使深耕刀对田地进行深耕;
21.s50:传动齿轮持续转动且传动齿轮与固定齿条分离时,联动滑座下移至限位基板上,且联动滑座在压缩弹簧和伸缩导向柱的复位拉伸作用下微微上移,使深耕刀抖落泥土,且传动齿轮转动使联动滑座下移至限位基板上,依次循环,直至深耕刀对田地进行深耕操
作完成。
22.与现有技术相比,本发明的有益效果是:
23.1、本发明的辣椒种植深耕设备及其方法,驱动电机启动,驱动电机带动驱动蜗轮旋转,驱动蜗轮在旋转的过程中,带动第一传动蜗杆和第二传动蜗杆转动,第一传动蜗杆转动带动第一传动皮带和第一传动轴杆转动,第二传动蜗杆转动带动第二传动皮带和第二传动轴杆转动,第一传动轴杆和第二传动轴杆在转动的过程中,带动传动齿轮旋转,使联动滑座在深耕基座内下移,联动滑座下移且挤压压缩弹簧和伸缩导向柱,联动滑座下移带动深耕刀下移,且第一传动轴杆转动带动第三传动皮带和第三传动轴杆转动,第三传动轴杆转动带动驱动伞齿轮转动,由于驱动伞齿轮和从动伞齿轮啮合,因此驱动伞齿轮转动带动从动伞齿轮、牵引轴杆和深耕刀转动,使深耕刀对田地进行深耕,利用深耕机构可对田地进行深耕,使土壤疏松性好,提高辣椒种植成活率。
24.2、本发明的辣椒种植深耕设备及其方法,传动齿轮持续转动且传动齿轮与固定齿条分离时,联动滑座下移至限位基板上,且联动滑座在压缩弹簧和伸缩导向柱的复位拉伸作用下微微上移,使深耕刀抖落泥土,且传动齿轮转动使联动滑座下移至限位基板上,依次循环,直至深耕刀对田地进行深耕操作完成,深耕刀在对田地进行深耕,深耕刀可抖落泥土,避免泥土粘连。
附图说明
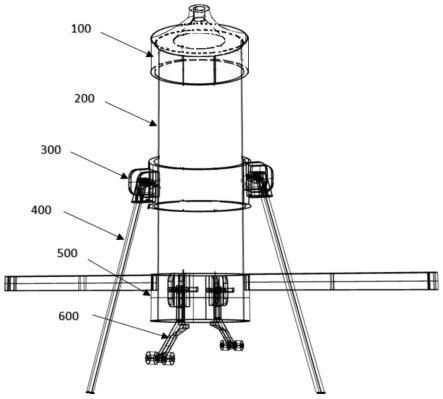
25.图1为本发明的辣椒种植深耕设备的俯向示意图;
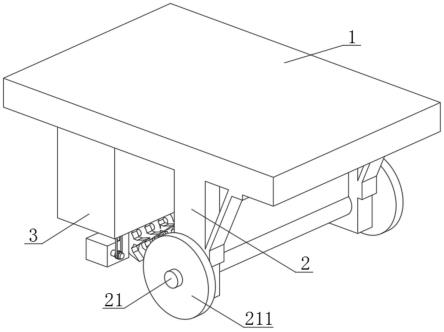
26.图2为本发明的辣椒种植深耕设备的仰向示意图;
27.图3为本发明的深耕机构的示意图;
28.图4为本发明的深耕机构的俯向剖面图;
29.图5为本发明的深耕机构的侧向剖面图;
30.图6为本发明的联动滑座通过压缩弹簧和伸缩导向柱连接在定位基板上的深耕机构的局部剖面图;
31.图7为本发明的驱动电机牵引传动齿轮旋转的深耕机构的局部剖面图;
32.图8为本发明的联动滑座的下端设置深耕刀的深耕机构的局部剖面图。
33.图中:1、车架;2、支架;21、转轴;211、车轮;3、深耕机构;31、深耕基座;32、联动滑座;33、压缩弹簧;34、伸缩导向柱;35、定位基板;36、驱动电机;37、驱动蜗轮;38、第一传动蜗杆;39、第二传动蜗杆;310、第一传动皮带;311、第一传动轴杆;312、第二传动皮带;313、第二传动轴杆;314、支撑基板;315、传动齿轮;316、固定齿条;317、第三传动皮带;318、第三传动轴杆;319、驱动伞齿轮;3110、从动伞齿轮;3111、牵引轴杆;3112、深耕刀;3113、限位基板。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.为了解决现有的翻耕刀的高度为固定的,在使用时,翻耕刀高度不能调节,只能对田地表面进行翻耕,不能对田地进行深耕,导致土壤疏松性较差,辣椒种植成活率低下的技术问题,请参阅图1-图8,本实施例提供以下技术方案:
36.一种辣椒种植深耕设备,包括车架1,车架1一端的底部设置有支架2,支架2的下端设置有转轴21,转轴21的两端安装有车轮211,车架1另一端的底部设置有深耕机构3,深耕机构3用于深耕田地。
37.具体的,利用深耕机构3可对田地进行深耕,使土壤疏松性好,提高辣椒种植成活率,且深耕刀3112在对田地进行深耕,深耕刀3112可抖落泥土,避免泥土粘连。
38.深耕机构3包括深耕基座31、联动滑座32、压缩弹簧33、伸缩导向柱34和定位基板35,深耕基座31安装在车架1的底部,深耕基座31的内侧设置有联动滑座32,联动滑座32活动连接在深耕基座31上,联动滑座32上部的两端通过压缩弹簧33和伸缩导向柱34连接在定位基板35上,压缩弹簧33和伸缩导向柱34的一端连接在联动滑座32上,压缩弹簧33和伸缩导向柱34的另一端连接在定位基板35上,定位基板35安装在深耕基座31的内壁上。
39.深耕机构3还包括驱动电机36、驱动蜗轮37、第一传动蜗杆38和第二传动蜗杆39,驱动电机36安装在联动滑座32上,驱动电机36的输出轴通过花键安装有驱动蜗轮37,驱动蜗轮37的一侧端面设置有第一传动蜗杆38,驱动蜗轮37和第一传动蜗杆38啮合,驱动蜗轮37的另一侧端面设置有第二传动蜗杆39,驱动蜗轮37和第二传动蜗杆39啮合,第一传动蜗杆38和第二传动蜗杆39均通过轴承安装在联动滑座32上。
40.具体的,驱动电机36启动,驱动电机36带动驱动蜗轮37旋转,由于第一传动蜗杆38和第二传动蜗杆39均与驱动蜗轮37啮合,因此驱动蜗轮37在旋转的过程中,带动第一传动蜗杆38和第二传动蜗杆39转动。
41.深耕机构3还包括第一传动皮带310、第一传动轴杆311、第二传动皮带312、第二传动轴杆313和支撑基板314,第一传动蜗杆38通过第一传动皮带310和皮带轮连接第一传动轴杆311,第二传动蜗杆39通过第二传动皮带312和皮带轮连接第二传动轴杆313,第一传动轴杆311和第二传动轴杆313均通过轴承安装在支撑基板314上,支撑基板314对称分布在联动滑座32的两端。
42.具体的,第一传动蜗杆38转动带动第一传动皮带310和第一传动轴杆311转动,第二传动蜗杆39转动带动第二传动皮带312和第二传动轴杆313转动,第一传动轴杆311和第二传动轴杆313在转动的过程中,带动传动齿轮315旋转。
43.深耕机构3还包括传动齿轮315和固定齿条316,第一传动轴杆311和第二传动轴杆313均通过花键安装有传动齿轮315,传动齿轮315的侧端面设置有固定齿条316,传动齿轮315和固定齿条316啮合,固定齿条316固定在深耕基座31的内壁上。
44.具体的,由于传动齿轮315和固定齿条316啮合,且固定齿条316固定在深耕基座31的内壁上,因此传动齿轮315在旋转的过程中,带动联动滑座32在深耕基座31内下移,联动滑座32下移且挤压压缩弹簧33和伸缩导向柱34。
45.深耕机构3还包括第三传动皮带317、第三传动轴杆318、驱动伞齿轮319、从动伞齿轮3110和牵引轴杆3111,第一传动轴杆311通过第三传动皮带317和皮带轮连接第三传动轴杆318,第三传动轴杆318通过轴承安装在联动滑座32的下端,第三传动轴杆318通过花键安装有驱动伞齿轮319,驱动伞齿轮319和从动伞齿轮3110啮合,从动伞齿轮3110通过花键安
装在牵引轴杆3111上,牵引轴杆3111通过轴承横向安装在联动滑座32的下端。
46.具体的,联动滑座32下移带动深耕刀3112下移,且第一传动轴杆311转动带动第三传动皮带317和第三传动轴杆318转动,第三传动轴杆318转动带动驱动伞齿轮319转动,由于驱动伞齿轮319和从动伞齿轮3110啮合,因此驱动伞齿轮319转动带动从动伞齿轮3110、牵引轴杆3111和深耕刀3112转动,使深耕刀3112对田地进行深耕,传动齿轮315持续转动且传动齿轮315与固定齿条316分离时,联动滑座32下移至限位基板3113上,且联动滑座32在压缩弹簧33和伸缩导向柱34的复位拉伸作用下微微上移,使深耕刀3112抖落泥土,且传动齿轮315转动使联动滑座32下移至限位基板3113上,依次循环,直至深耕刀3112对田地进行深耕操作完成。
47.深耕机构3还包括深耕刀3112,深耕刀3112位于联动滑座32的下端,深耕刀3112均匀分布在牵引轴杆3111上。
48.深耕机构3还包括限位基板3113,限位基板3113安装在深耕基座31的内壁上,限位基板3113位于定位基板35的上方。
49.利用限位基板3113可对联动滑座32进行限位,可保证传动齿轮315与固定齿条316分离时,传动齿轮315可正常旋转且带动深耕刀3112转动。
50.为了更好的展现辣椒种植深耕设备的辣椒种植深耕流程,本实施例现提出一种辣椒种植深耕设备的辣椒种植深耕方法,包括如下步骤:
51.s10:驱动电机36启动,驱动电机36带动驱动蜗轮37旋转,由于第一传动蜗杆38和第二传动蜗杆39均与驱动蜗轮37啮合,因此驱动蜗轮37在旋转的过程中,带动第一传动蜗杆38和第二传动蜗杆39转动;
52.s20:第一传动蜗杆38转动带动第一传动皮带310和第一传动轴杆311转动,第二传动蜗杆39转动带动第二传动皮带312和第二传动轴杆313转动,第一传动轴杆311和第二传动轴杆313在转动的过程中,带动传动齿轮315旋转;
53.s30:由于传动齿轮315和固定齿条316啮合,且固定齿条316固定在深耕基座31的内壁上,因此传动齿轮315在旋转的过程中,带动联动滑座32在深耕基座31内下移,联动滑座32下移且挤压压缩弹簧33和伸缩导向柱34;
54.s40:联动滑座32下移带动深耕刀3112下移,且第一传动轴杆311转动带动第三传动皮带317和第三传动轴杆318转动,第三传动轴杆318转动带动驱动伞齿轮319转动,由于驱动伞齿轮319和从动伞齿轮3110啮合,因此驱动伞齿轮319转动带动从动伞齿轮3110、牵引轴杆3111和深耕刀3112转动,使深耕刀3112对田地进行深耕;
55.s50:传动齿轮315持续转动且传动齿轮315与固定齿条316分离时,联动滑座32下移至限位基板3113上,且联动滑座32在压缩弹簧33和伸缩导向柱34的复位拉伸作用下微微上移,使深耕刀3112抖落泥土,且传动齿轮315转动使联动滑座32下移至限位基板3113上,依次循环,直至深耕刀3112对田地进行深耕操作完成。
56.综上,本发明的辣椒种植深耕设备及其方法,利用深耕机构3可对田地进行深耕,使土壤疏松性好,提高辣椒种植成活率,且深耕刀3112在对田地进行深耕,深耕刀3112可抖落泥土,避免泥土粘连。
57.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其
发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。