基于自适应惩罚taea的无人机集群任务规划方法
技术领域
1.本发明属于无人机集群技术领域,涉及一种无人机集群任务规划方法,具体涉及一种动态场景环境下基于自适应惩罚的双档案演化算法taea的无人机集群任务规划方法,可用于城市安防、环境监测、野外搜救和防恐监视等领域。
背景技术:
2.无人机集群任务规划是指将动态的任务分配合适的无人机编队,并确定无人机编队执行任务的顺序。根据无人机集群的组织形式,无人机任务分配的方式主要有集中式、分布式两种方式。集中式指的是编队中所有无人机通过唯一的一个控制中心进行通信,实现信号传输以及控制的一种系统结构。编队内所有无人机将其采集的外部信息以及自身状态信息传输至中央处理中心,再由中央处理中心对信息处理与决策,并形成控制指令,随后发送给集群内的无人机,实现无人机集群的任务分配规划。分布式指的是编队中所有无人机之间可以互相通信的一种控制系统结构。与集中式无人机集群系统相比,分布式无人机集群系统具有以下优点:每个无人机都是计算节点,每个无人机可自主决策,能够降低中心节点损毁带来的风险,对场景变化具备快速应对的能力;但分布式无人机系统通信节点过多时,通信的信息量极大,对系统通信能力带来极大挑战,而且只能获得局部最优解而无法得到全局最优解,降低无人机执行任务的效率。
3.根据无人机集群的工作场景可将无人机集群任务规划分为动态场景环境下的无人机集群任务规划方法和静态场景环境下的无人机集群任务规划方法,其中动态场景环境下的无人机集群任务规划方法的基本原理是在任务发生动态变化后,重新进行无人机集群任务分配规划,使得无人机集群高效完成任务,重点是发现新的任务后,提升求解全局最优任务分配规划方案的效率。例如申请公布号cn111199360a,名称为“无人机任务分配规划方法”的专利申请,该方法当无人机执行任务过程中有新任务p需要执行时,将该任务的分配分为预分配和协商两个阶段,即在预分配阶段由中心节点根据个体满意函数和个体拒绝函数选择出一个可执行任务的满意集集合,并判断该集合是否为空:如果该集合不为空,则由满足条件的无人机集合通过相互之间的协商,选择出最合适的一架无人机执行新任务,如果集合为空,则由多架无人机组合共同执行同一任务。该方法主要解决现有技术在进行任务分配时中心节点的计算时间过长的问题,保证了任务的实时动态分配和无人机任务的负载均衡,提升了无人机执行任务的整体性能,但该方法存在不足之处:1、出现新的任务后进行任务分配规划,通过无人机的相互协商机制得到新的任务规划方案,协商过程耗时较大,求解任务规划方案效率较低;2、该方法通过无人机的相互协商机制仅能得到一个局部最优的任务规划方案,无人机集群按照该任务规划方案执行任务不能以最小代价收获最大收益,进而使得无人机集群难以发挥最大效力。
技术实现要素:
4.本发明的目的在于克服上述现有技术存在的缺陷,提出了一种基于自适应惩罚
taea的无人机集群任务规划方法,用于解决现有技术中存在的规划效率较低的技术问题。
5.为实现上述目的,本发明采取的技术方案包括如下步骤:
6.(1)构建无人机集群协同搜索跟踪任务规划场景:
7.构建无人机集群协同搜索跟踪任务规划场景,包括分布在地面的m个正方形网格任务区域t={t1,t2,...,tm,...,tm}、分布在网格任务区域t内的k个区域目标t
′
={t1′
,t
′2,...,t
′k,...,t
′k}、分布在空间同一水平面内的n个无人机搜索编队f={f1,f2,...,fn,...,fn}和中央处理器θ,每个网格任务区域tm的中心点坐标、威胁因子、威胁等级参数分别为(xm,ym)、wm、λm,每个目标t
′k的威胁因子、威胁等级参数分别为w
′k、λ
′k,每个无人机搜索编队fn包括飞行速度均为的2架无人机,所有无人机搜索编队执行搜索任务的起始时刻为t0、最大飞行时间为t
max
、在每个任务区域tm内搜索的时间为φ、任务规划时间间隔为τ,每个无人机搜索编队fn执行一次搜索任务覆盖的任务区域的个数为l,其中,m≥100,tm表示第m个任务区域,k≥1,t
′k表示第k个区域目标,n≥2,fn表示第n个无人机搜索编队,l≥2;
8.(2)建立无人机搜索编队搜索的多目标多约束优化问题模型:
9.(2a)将无人机搜索编队fn和网格任务区域tm的分配关系作为分配决策变量assign[m,n],将无人机搜索编队执行格任务区域集合τn的先后顺序作为顺序决策变量order[n],并通过assign[m,n]的值确定每个无人机搜索编队fn所分配的网格任务区域集合τn,然后通过order[n]对τn中所有分配的网格任务区域进行排序,得到排序后的网格任务区域集合t
nl
;
[0010]
(2b)通过每个无人机搜索编队fn的飞行速度和排序后的网格任务区域集合t
nl
,计算无人机搜索编队fn完成任务区域t
nl
的时刻
[0011]
(2c)建立以最小化所有网格任务区域在时间内τ的威胁值之和s
t
的积分f1,以及最小化n个无人机搜索编队完成各自所分配l个网格任务区域的最大时间f2为目标函数,无人机搜索编队在采样时间点之间的相互距离d
ti
(fa,fb)、每个无人机搜索编队fn最大飞行时间约束c2、每个网格任务区域tm的威胁值约束c3为约束条件的f在网格任务区域t进行搜索的任务规划的多目标多约束优化问题模型ψ1,其中:
[0012]
min f1[0013]
min f2[0014][0015][0016]
c3:s(m,t)≤s
m,max
[0017][0018][0019]
其中,s(m,t)表示t时刻每个网格任务区域tm的威胁度,e表示自然对数底数,t为以t0为起始时刻的时间变量,t
′
为时间偏移量,d
min
表示无人机搜索编队之间的最小安全距离,s
m,max
表示网格任务区域tm的威胁值上限值;
[0020]
(3)获取最优搜索任务规划方案:
[0021]
通过分配决策变量assign[m,n]和顺序决策变量order[n]的十进制编码方式随机产生包含个初始个体x的收敛性种群ca和多样性种群da,并采用面向约束的双档案演化算法,通过更新ca和da求解多目标多约束优化问题模型ψ1,得到收敛性种群ca0和多样性种群da0,然后从ca0的帕累托前沿面中任意选取一个个体υ1作为最优搜索任务规划方案;
[0022]
(4)建立无人机搜索编队搜索跟踪的多目标多约束优化问题模型:
[0023]
(4a)中央处理器θ选取无人机搜索编队f
μ
飞向网格任务区域t
ν
与无人机搜索编队f
η
组成无人机跟踪编队f
μ
″
η
,对fn采用搜索任务规划方案υ1对网格任务区域t
ν
进行搜索所发现的目标t
′k建立跟踪,剩余除f
μ
和f
η
的n-2个无人机搜索编队f
′
根据决策变量assign[m,n
′
]和order[n
′
]确定无人机搜索编队所分配网格任务区域搜索顺序,f
′
={f
′
,f
′2,...,fn″
,...,f
′
n-2
},其中,μ=sent[n
″
],sent[n
″
]为指派决策变量,n
″
∈{1,...,n}\η;
[0024]
(4b)建立以最小化所有网格任务区域在时间τ内的威胁值之和s
′
t
的积分f
′1、最小化n-2个无人机搜索编队完成各自所分配l个网格任务区域的最大时间f2′
以及最小化无人机跟踪编队f
μ
到达网格任务区域t
ν
的时间f3′
为目标函数,无人机搜索编队在采样时间点之间的相互距离以无人机搜索编队在采样时间点的相互距离的安全约束c1′
、每个无人机搜索编队最大飞行时间约束c2′
、每个网格任务区域tm的威胁值约束c3′
、已发现目标t
′k的威胁值约束c4′
为约束条件的无人机搜索编队f
′
和无人机跟踪编队在网格任务区域t进行搜索和跟踪的任务规划的多目标多约束优化问题模型ψ2,其中:
[0025][0026][0027]
min f1′
[0028]
min f2′
[0029]
min f3′
[0030][0031][0032]c′3:s(m,t)≤s
m,max
[0033]c′4:s(k,t)≤s
k,max
[0034]
其中,s(k,t)表示t时刻已发现目标t
′k的威胁度,t
″
为时间偏移量,s
k,max
表示已发现目标t
′k威胁度上限值;
[0035]
(5)初始化自适应惩罚的双档案演化算法taea的参数:
[0036]
初始化步骤(3)所获取的收敛性种群ca0为收敛性种群ca的初代种群,随机产生包含个初始个体x作为多样性种群da的初代种群,迭代次数为r,最大迭代次数为r,并令r=0;
[0037]
(6)对收敛性种群和多样性种群进行更新:
[0038]
(6a)将第r代收敛性种群car和第r代多样性种群dar合并得到种群hmr,分别计算种群hmr中属于car和dar的非支配个体占种群hmr的比例pc和pd,判断pc》pd是否成立,若是,从car中随机选取个个体作为种群p
1r
,否则从dar中随机选取个个体作为种群p
1r
;计算种群car中非支配个体所占比例pc并产生包含个随机数的向量pf,判断向量pf的第f个值pf(f)》pc是否成立,若是,从car中随机选取一个个体作为p
2r
的第f个个体,否则从dar中随机选取一个个体作为p
2r
的第f个个体,p
1r
和p
2r
构成组父代个体pr,对pr中的每组父代个体进行均匀交叉操作得到组个体p
ru
,对p
ru
中的每组个体进行部分匹配交叉操作得到组个体p
rp
,并从p
rp
的每组个体中随机选取一个个体,构成p
rhalf
,然后对p
rhalf
中的每个个体进行均匀变异得到p
rum
,对p
rum
中的每个个体进行插入变异操作得到子代种群qr;
[0039]
(6b)将第r代收敛性种群car与子代种群qr组成种群hcr,第r代收敛性种群dar与子代种群qr组成种群hdr,种群hcr中的可行个体、不可行个体分别构成种群fsr、种群isr;
[0040]
(6c)分别通过hcr、hdr对收敛性种群car、多样性种群dar进行更新;
[0041]
(7)获取无人机集群协同搜索跟踪任务规划结果:
[0042]
判断r=r是否成立,若是,根据权重法选取第r代收敛性种群car中的帕累托前沿面中任意选取一个个体γ2的决策变量的取值确定的无人机搜索编队所分配的执行网格任务区域及执行搜索所分配网格任务区域的顺序和指派的搜索无人机编队作为无人机集群搜索跟踪的任务规划方案,否则,令r=r 1,并执行步骤(6);
[0043]
本发明与现有技术相比,具有如下优点:
[0044]
1、本发明在求解无人机集群搜索和跟踪任务规划问题时,通过基于自适应惩罚的双档案演化算法利用有价值不可行个体加速种群收敛从而获得全局最优任务规划方案,避免了现有技术协商过程耗时较大的缺陷,进而提高了任务规划的效率。
[0045]
2、本发明在无人机搜索编队发现目标后建立新的任务规划问题模型,通过优化任务规划问题模型,获得全局最优任务规划方案,有利于发挥无人机集群效力。
附图说明
[0046]
图1是本发明的实现流程图。
[0047]
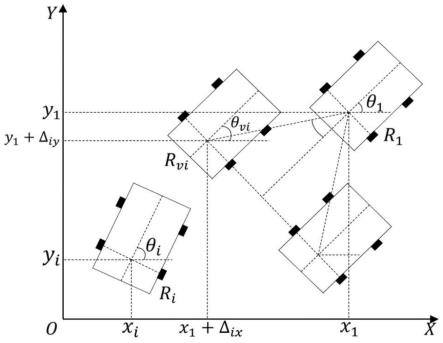
图2是本发明的无人机搜索编队有效搜索范围示意图。
[0048]
图3是本发明的正方形网格任务区域及各网格任务区域在时刻t威胁值示意图。
具体实施方式
[0049]
以下结合附图和具体实施例,对本发明作进一步详细描述。
[0050]
参照图1,本发明包括如下步骤:
[0051]
步骤1)构建无人机集群协同搜索跟踪任务规划场景:
[0052]
构建无人机集群协同搜索跟踪任务规划场景,包括分布在地面的m个正方形网格任务区域t={t1,t2,...,tm,...,tm}、分布在网格任务区域t内的k个区域目标t
′
={t1′
,t
′2,...,t
′k,...,t
′k}、分布在空间同一水平面内的n个无人机搜索编队f={f1,f2,...,fn,...,fn}和中央处理器θ,每个网格任务区域tm的中心点坐标、威胁因子、威胁等级参数分别为(xm,ym)、wm、λm,每个目标t
′k的威胁因子、威胁等级参数分别为w
′k、λ
′k,每个无人机搜索编队fn包括飞行速度均为的2架无人机,所有无人机搜索编队执行搜索任务的起始
时刻为t0、最大飞行时间为t
max
、在每个任务区域tm内搜索的时间为φ、任务规划时间间隔为τ,每个无人机搜索编队fn执行一次搜索任务覆盖的任务区域的个数为l,其中,m≥100,tm表示第m个任务区域,k≥1,t
′k表示第k个区域目标,n≥2,fn表示第n个无人机搜索编队,l≥2,本实例中,m=400,k=1,n=5,wm为[1
×
10-5
,1
×
10-4
]范围内的随机数,λm为[1
×
10-11
,1
×
10-5
]范围内的随机数,w
′k=1
×
10-1
,λ
′k=1
×
10-5
,t0=0,t
max
=1
×
104秒,φ=10秒,τ=200秒,l=7,每个网格任务区域tm表示为无人机搜索编队有效搜索圆形范围的内接正四边形,每个网格区域边长为100米,如图2所示,虚线圆形表示无人机搜索编队有效搜索范围,为简化场景,无人机搜索编队有效搜索范围表示为圆形内接灰色正方形。
[0053]
步骤2)建立无人机搜索编队搜索的多目标多约束优化问题模型:
[0054]
步骤2a)将无人机搜索编队fn和网格任务区域tm的分配关系作为分配决策变量assign[m,n],将无人机搜索编队执行格任务区域集合τn的先后顺序作为顺序决策变量order[n],并通过assign[m,n]的值确定每个无人机搜索编队fn所分配的网格任务区域集合τn,然后通过order[n]对τn中所有分配的网格任务区域进行排序,得到排序后的网格任务区域集合t
nl
;
[0055]
步骤2b)通过每个无人机搜索编队fn的飞行速度和排序后的网格任务区域集合t
nl
,计算无人机搜索编队fn完成任务区域t
nl
的时刻计算公式为:
[0056][0057][0058]
其中,(x
nl
,y
nl
)和(x
n(l 1)
,y
n(l 1)
)分别为t
nl
中执行顺序相邻的两个网格任务区域;
[0059]
步骤2c)建立以最小化所有网格任务区域在时间内τ的威胁值之和s
t
的积分f1,以及最小化n个无人机搜索编队完成各自所分配l个网格任务区域的最大时间f2为目标函数,无人机搜索编队在采样时间点之间的相互距离d
ti
(fa,fb)、每个无人机搜索编队fn最大飞行时间约束c2、每个网格任务区域tm的威胁值约束c3为约束条件的f在网格任务区域t进行搜索的任务规划的多目标多约束优化问题模型ψ1,其中:
[0060]
min f1[0061]
min f2[0062][0063][0064]
c3:s(m,t)≤s
m,max
[0065][0066][0067]
[0068][0069][0070][0071][0072][0073]
其中,s(m,t)表示t时刻每个网格任务区域tm的威胁度,e表示自然对数底数,t为以t0为起始时刻的时间变量,t
′
为时间偏移量,d
min
表示无人机搜索编队之间的最小安全距离,s
m,max
表示网格任务区域tm的威胁值上限值,ti为采样时间序列,fs为时间采样率,为ti时刻无人机搜索编队fn所在的位置;本实例中d
min
=20米,s
m,max
=1
×
105,fs=1,网格任务区域t的每一边都包含20个正方形网格任务区域,如图3所示,α=20,网格任务区域的颜色越深代表该网格区域威胁值越大。
[0074]
步骤3)获取最优搜索任务规划方案:
[0075]
通过分配决策变量assign[m,n]和顺序决策变量order[n]的十进制编码方式随机产生包含个初始个体x的收敛性种群ca和多样性种群da,并采用面向约束的双档案演化算法,通过更新ca和da求解多目标多约束优化问题模型ψ1,得到收敛性种群ca0和多样性种群da0,然后从ca0的帕累托前沿面中任意选取一个个体γ1作为最优搜索任务规划方案。
[0076]
步骤4)建立无人机搜索编队搜索跟踪的多目标多约束优化问题模型:
[0077]
步骤4a)中央处理器θ选取无人机搜索编队f
μ
飞向网格任务区域t
ν
与无人机搜索编队f
η
组成无人机跟踪编队f
″
μη
,对fn采用搜索任务规划方案υ1对网格任务区域t
ν
进行搜索所发现的目标t
′k建立跟踪,剩余除f
μ
和f
η
的n-2个无人机搜索编队f
′
根据决策变量assign[m,n
′
]和order[n
′
]确定无人机搜索编队所分配网格任务区域搜索顺序,f
′
={f
′1,f
′2,...,f
′n′
,...,f
′
n-2
},其中,μ=sent[n
″
],sent[n
″
]为指派决策变量,n
″
∈{1,...,n}\η;
[0078]
步骤4b)建立以最小化所有网格任务区域在时间τ内的威胁值之和s
′
t
的积分f
′1、最小化n-2个无人机搜索编队完成各自所分配l个网格任务区域的最大时间f2′
以及最小化无人机跟踪编队f
μ
到达网格任务区域t
ν
的时间f3′
为目标函数,无人机搜索编队在采样时间点之间的相互距离以无人机搜索编队在采样时间点的相互距离的安全约束c1′
、每个无人机搜索编队最大飞行时间约束c2′
、每个网格任务区域tm的威胁值约束c3′
、已发现目标t
′k的威胁值约束c4′
为约束条件的无人机搜索编队f
′
和无人机跟踪编队在网格任务区域t进行搜索和跟踪的任务规划的多目标多约束优化问题模型ψ2,其中:
[0079]
[0080][0081]
min f1′
[0082]
min f2′
[0083]
min f3′
[0084][0085][0086]c′3:s(m,t)≤s
m,max
[0087]c′4:s(k,t)≤s
k,max
[0088][0089][0090]
其中,s(k,t)表示t时刻已发现目标t
′k的威胁度,t
″
为时间偏移量,s
k,max
表示已发现目标t
′k威胁度上限值,s
′
t
表示t时刻所有网格任务区域和已发现目标目标t
′k的威胁值之和,表示无人机搜索编队f
μ
到达网格任务区域t
ν
的时间;本实例中s
k,max
=1
×
107。
[0091]
步骤5)初始化自适应惩罚的双档案演化算法taea的参数:
[0092]
初始化步骤(3)所获取的收敛性种群ca0为收敛性种群ca的初代种群,随机产生包含个初始个体x作为多样性种群da的初代种群,迭代次数为r,最大迭代次数为r,并令r=0;本实例中,r=300。
[0093]
步骤6)对收敛性种群和多样性种群进行更新:
[0094]
步骤6a)将第r代收敛性种群car和第r代多样性种群dar合并得到种群hmr,分别计算种群hmr中属于car和dar的非支配个体占种群hmr的比例pc和pd,判断pc》pd是否成立,若是,从car中随机选取个个体作为p
1r
,否则从dar中随机选取个个体作为p
1r
;计算种群car中非支配个体所占比例pc并产生包含个随机数的向量pf,判断向量pf的第f个值pf(f)》pc是否成立,若是,从car中随机选取一个个体作为p
2r
的第f个个体,否则从dar中随机选取一个个体作为p
2r
的第f个个体,p
1r
和p
2r
构成组父代个体pr,对pr中的每组父代个体进行均匀交叉操作得到组个体p
ru
,对p
ru
中的每组个体进行部分匹配交叉操作得到组个体p
rp
,并从p
rp
的每组个体中随机选取一个个体,构成p
rhalf
,然后对p
rhalf
中的每个个体进行均匀变异得到p
rum
,对p
rum
中的每个个体进行插入变异操作得到子代种群qr;
[0095]
步骤6b)将第r代收敛性种群car与子代种群qr组成种群hcr,第r代收敛性种群dar与子代种群qr组成种群hdr,种群hcr中的可行个体、不可行个体分别构成种群fsr、种群isr;
[0096]
步骤6c)分别通过种群hcr和种群isr对收敛性种群car进行更新,通过hdr对多样性种群dar进行更新,更新方法为:当时,car=xr,当时,car=sr;其中,xr是种群isr中依据每个个体的约束违反值和基于约束的修正切比雪夫分解值构成的二维优化问题选出的n-|fsr|个最优个体的集合,由x
hr
和χ
hr 1
组成;s
lr
表示基于自适应惩罚的双
档案演化算法taea求得的种群hcr中最优个体,表示通过自适应惩罚的双档案演化算法taea求得的种群hdr中最优个体xb的集合,分别表示为:
[0097]
xr={x
hr
,χ
hr 1
}
[0098][0099][0100][0101][0102][0103][0104][0105]
xb=argmin{g
tch
(x|wi,z
*
)}
[0106][0107][0108][0109][0110][0111][0112][0113][0114]
v3=max(s(m,t)-s
m,max
,0)
[0115]
v4=max(s(k,t)-s
k,max
,0)
[0116]
x
hr
表示对种群isr中的个体根据双目标优化问题γ(x)进行快速非支配排序,把种群isr中的个体划分为不同等级,取前hr个等级的个体构成的集合,且hr是满足的最大整数值,χ
h 1
表示取第hr个等级的个体中归一化约束违反值较小的个个体构成的集合,s
lr
表示种群fsr中的个体依据修正目标函数值进行快速非支配排序,把种群fsr中的个体划分为不同等级,取前lr个等级的个体构成的集合,且lr是满足的最小值,表示第lr个等级的个体中基于惩罚的修正切比雪夫分解方法g
mtch-penalty
(x|wi,z
*
)选出的最劣个体xw组成的集合,x
car
表示car作为参考集的部分个体构成的集合,表示基于惩罚的修正切比雪夫分解方法g
mtch-penalty
(x|wi,z
*
)从hdr中选出的最优个体xb的集合,γ(x)表示构建的包含约束违反值和基于自适应惩罚的修正切比雪夫分解值在内的双目标优化问题,表示整合个体x归一化目标函数值
和自适应惩罚值p1、p2、p3得到的的修正目标函数值;分别表示目标函数f1、f2、f3的归一化值,p1、p2、p3分别表示目标函数f1、f2、f3的自适应惩罚值,表示的加权平均值,表示违反值v1,v2,v3,v4的归一化值,rf表示种群中的可行个体的所占比率;
[0117]
步骤7)获取无人机集群协同搜索跟踪任务规划结果:
[0118]
判断r=r是否成立,若是,根据权重法选取第r代收敛性种群car中的帕累托前沿面中任意选取一个个体υ2的决策变量的取值确定的无人机搜索编队所分配的执行网格任务区域及执行搜索所分配网格任务区域的顺序和指派的搜索无人机编队作为无人机集群搜索跟踪的任务规划方案,否则,令r=r 1,并执行步骤(6)。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。