1.本实用新型涉及一种室内无人机巡检,特别是一种室内无人机变高飞行系统。
背景技术:
2.目前无人机在室外巡检技术已经很成熟,但室内巡检还存在一些问题。例如:很多室内巡检依然使用摄像头、机器人、人工巡检模式,其中摄像头存在死角盲区,机器人存在无法到达区域,人工巡检存在危险性且效率低。
3.室内结构较为复杂,以水电站厂房内部结构为例,内部设备较多,厂房大小不一致,且高度不一,大的为150m*60m,小的7m*5m,存在很大的作业难度及安全隐患。这种情况下无人机除了室内定位与视觉避障以外,需要有更精确的飞行航线。现有技术主要解决了室内定位问题,无法做到室内变高飞行精细化巡检。
技术实现要素:
4.本实用新型的发明目的在于:针对上述存在的问题,提供一种室内无人机变高飞行系统,通过激光雷达获取室内高精度地形dem(数字高程模型),根据dem规划出精确的变高飞行航线,并结合视觉和uwb定位,实现室内变高飞行,并提高作业效率。
5.本实用新型采用的技术方案如下:
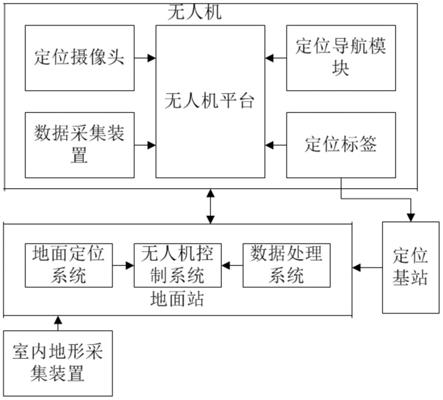
6.本实用新型一种室内无人机变高飞行系统,包括无人机和地面站,以及室内地形采集装置、安装在室内的定位基站;
7.所述无人机上安装有无人机平台和数据采集装置,无人机平台上搭载有定位导航模块;所述无人机上还安装有定位标签;
8.所述地面站安装有数据处理系统、无人机控制系统和地面定位系统;所述定位标签、定位基站和地面定位系统之间通信进行uwb定位;所述室内地形采集装置将采集的室内地形生成dem,并上传到地面站规划航线,无人机定位导航模块根据航线和uwb定位信息进行定位导航。
9.进一步的,还包括安装在无人机上的电量检测装置,以及地面的电池更换机械臂和无人机充电场。
10.进一步的,所述室内地形采集装置包括激光雷达。
11.进一步的,所述无人机采用全电动垂直起降无人机。
12.进一步的,所述数据采集装置包括空气质量传感器、图像识别装置或热红外装置。
13.进一步的,所述无人机上还安装有定位摄像头,室内固定位置安装有定位二维码,定位摄像头通过拍摄定位二维码进行定位。
14.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
15.1、本实用新型实现了室内无人机变高飞行,从而达到室内变高飞行的精细化巡检。
16.2、本实用新型通过获取室内地形生成dem,用于无人机定位导航,可以保障无人机
安全飞行,并且可以提高作业效率。
17.3、本实用新型变高飞行的精细化巡检可以检测室内气体和分布情况,及时发现气体泄露或空气污染情况,以及检测室内的设备,为安全、高效生产提供有效保障。
18.4、本实用新型实现室内无人机飞行、数据采集、数据分析、智能充电等的一体化。
附图说明
19.图1是本实用新型一种室内无人机变高飞行系统的结构示意图。
具体实施方式
20.下面结合附图,对本实用新型作详细的说明。
21.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
22.如图1所示,本实用新型一种室内无人机变高飞行系统,包括无人机和地面站,以及室内地形采集装置、安装在室内的定位基站;
23.无人机:无人机上安装有无人机平台和数据采集装置,无人机平台上搭载有定位导航模块;所述无人机上还安装有定位标签;所述数据采集模块,用于采集空气相关参数。
24.地面站:地面站安装有数据处理系统、无人机控制系统和地面定位系统;所述数据采集处理模块,用于收集相关数据,实现数据汇总,并根据需求进行处理展示;所述无人机控制模块,用于控制无人机;所述地面定位模块,根据uwb定位模块的定位信息实现无人机空间位置的实时定位,利用视觉定位模块采集的相关信息,实现室内关键路径上的重点定位。
25.uwb定位:所述定位标签、定位基站和地面定位系统之间通信进行uwb定位;无人机上的定位标签会按时隙广播携带有自身id号的无线电信号,定位基站接收到定位标签发送的信号后,将接收到信号的时间戳和标签id卡号传输给地面站,地面站完成对定位标签的定位。基站也可以接收到应用层下发的指令,完成相关的设置
26.变高飞行航线:室内地形采集装置将采集的室内地形生成dem,并上传到地面站,根据dem和任务规划精细化变高飞行航线,无人机定位导航模块根据航线和uwb定位信息进行定位导航。
27.无人机充电:包括安装在无人机上的电量检测装置,以及地面的电池更换机械臂和无人机充电场。在无人机到达安全电量以后,智能返航至无人机智能充电场,使用机械臂更换电池,同时进行自主充电。
28.数据采集装置:包括空气质量传感器、图像识别装置或热红外装置,不仅用于采集空气相关参数,还用于异物检测或设备温度检测;数据采集模块包括机载的空气质量检测设备、图像识别模块或热红外模块;通过图像识别模块检测是否由异物;通过热红外模块来检测设备温度。
29.在实施例中,室内地形采集装置采用激光雷达,扫描室内结构生成dem(数字高程模型),根据高精度dem和任务规划精细化变高飞行航线。
30.在一个实施例中,采用ey-40无人机,ey-40是一款小型全电动垂直起降无人机系
统,采用常规四旋翼布局形式以简单可靠的方式解决了起降场地不足的难题,兼具无人机的长航时、大载重、可靠性高的特点。它能在山区、丘陵、丛林等复杂地形和建筑物密集的区域顺利作业,极大扩展了无人机应用范围。ey-40同时可搭载空气质量传感器,利用无人机取代传统的人工样监测,可快速追溯分析污染指数及污染源。ey-40系统结构简单、模块化设计,可实现快速装配;可实现任务模块的替换更换;飞行控制实现高精度定位控制;全自主起飞,无需遥感器,自主起飞,可实现航线飞行作业机自主降落。
31.uwb定位系统:uwb即超宽带,包括基站和信标(标签),其中每个室内需安装4个基站作为锚点,信标安装于无人机上,通过信标与锚点的无线通信,确定信标的实时位置,根据室内巡线的需求,可设计2维的定位导航和三维的定位导航,实现室内的整体实时定位。
32.数据采集处理模块采用eq-60气体检测仪器,eq-60为专业便携式监测仪器,配备智能可视化分析软件,搭载于无人机、汽车等移动载具,实时获取精确的空气污染空间分布信息,为环保、巡检、应急等行业提供及时有效的决策支持,并帮助他们显著提升工作效率、降低安全风险与成本。一次任务,精确采集最多9项空气污染物浓度分布数据,可进行拓展。
33.本实用新型一种室内无人机变高飞行系统在使用中,利用激光雷达扫描室内地形并生成dem;根据dem和任务需求规划精细化变高飞行航线,地面站航线输入;控制无人机起飞作业,并采集数据和回传;在无人机飞行中,根据uwb定位模块和视觉定位模块采集的数据,以及航线进行无人机实时定位导航;无人机作业完控制无人机返回起飞点自动降落。
34.在无人机飞行中,实时检测无人机的电池电量,当检测到无人机电池电量低于阈值,控制无人机返航降落至无人机智能充电场进行电池更换或充电。在无人机降落中,通过视觉定位模块,确定降落的地点,控制无人机精准降落。
35.由于室内的结构基本不会发生变化,使用激光雷达扫描室内结构生成dem(数字高程模型),可以保障无人机安全飞行且设计变高飞行航线可以提高作业效率。变高飞行的精细化巡检可以完成厂房内部的各种标记,设备表面、气体等巡检,为安全、高效生产提供有效保障。本实用新型室内地形采集系统:利用激光雷达扫描室内地形并生成高精度dem(数字高程模型),精度满足10cm以内;地面站以dem(数字高程模型)为基准,规划精细化变高飞行航线,无人机系统利用现有的无人机平台搭载基于视觉和uwb的定位导航模块实现室内区域导航,同时搭载数据采集模块实现空气相关参数;数据采集处理模块:收集相关数据,实现数据汇总,并根据需求进行处理展示;智能充电巡检系统:在无人机到达安全电量以后,智能返航至无人机智能充电场,使用机械臂更换电池,同时进行自主充电,并设定定时巡检计划,实现室内无人机从飞行、数据采集、数据分析、智能充电一体化解决方案。
36.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。