结肠镜系统及其控制方法
1.技术领域
2.本发明涉及医疗器械技术领域,尤其涉及结肠镜系统及其控制方法。
背景技术:
3.结肠镜为肠道检查的主要手段,具有检出率高、功能多的优点,但同时具有进镜操作繁琐、进镜缓慢、患者有痛感和对肠壁有严重创伤的缺点。
4.针对传统结肠镜的以上缺点,近几年出现了一种无创伤、操作简便的胶囊内镜的构想。但是,胶囊内镜具有无法取样、无法实施手术、因无法送水送气而影响成像效果的缺点,因此,胶囊内镜仍然无法替代传统结肠镜,没有从根本上解决传统结肠镜的上述问题落。
技术实现要素:
5.(一)要解决的技术问题本发明所解决的技术问题为提供一种进镜简单、进镜快捷、减少患者痛感以及减少对肠壁的刺激的结肠镜系统及其控制方法。
6.(二)技术方案为了达到上述目的,本发明采用的主要技术方案包括:本发明提供一种结肠镜系统,包括镜体、三轴正交线圈组、多个z向线圈组、三轴正交梯度磁场发生装置、镜体用供电装置和外部供电装置;三轴正交梯度磁场发生装置包括两个沿第一横向方向同轴排列且绕线方向相同的第一横向线圈、两个沿第二横向方向同轴排列且绕线方向相同的第二横向线圈、两个沿纵向方向同轴排列且绕线方向相同的纵向线圈,两个第一横向线圈、两个第二横向线圈和两个纵向线圈围合形成供患者胯部穿过的空间且能够在该空间内形成三轴正交梯度磁场;外部供电装置与第一横向线圈、第二横向线圈和纵向线圈分别连接;三轴正交线圈组固定于镜体的头部,三轴正交线圈组包括两个沿x方向同轴排列且绕线方向相同的x向线圈、两个沿y方向同轴排列且绕线方向相同的y向线圈、两个沿z方向同轴排列且绕线方向相同的第一z向线圈(5);多个z向线圈组沿镜体的轴向固定于镜体并位于三轴正交线圈组的后侧,z向线圈组包括两个沿z方向同轴排列且绕线方向相同的第二z向线圈;镜体用供电装置与x向线圈、y向线圈、第一z向线圈和第二z向线圈分别连接;第一横向和第二横向与x方向和y方向一一对应地平行,纵向与z方向平行。
7.根据本发明,x向线圈和第一z向线圈为与镜体的外壁形状配合的弧状,y向线圈为与镜体同轴的圆环状。
8.根据本发明,在镜体的一个周向上,两个x向线圈和两个第一z向线圈围绕镜体的轴线阵列布置。
9.根据本发明,镜体在轴向上呈柔性,在径向上呈刚性。
10.根据本发明,还包括电源控制器,电源控制器与镜体用供电装置、外部供电装置连接;电源控制器能够控制镜体用供电装置选择性地向两个x向线圈通方向相同且大小相同的电流,向两个y向线圈通方向相同且大小相同的电流,向两个第一z向线圈通方向相同且大小相同的电流,向两个第二z向线圈通方向相同且大小相同的电流;电源控制器能够控制外部供电装置选择性地向两个第一横向线圈通方向相反且大小相同的电流,向两个第二横向线圈通方向相反且大小相同的电流,向两个纵向线圈通方向相反且大小相同的电流。
11.根据本发明,还包括上位机和操作装置;镜体的头部设置有摄像头,内部设置有数据线,摄像头通过数据线与上位机连接;电源控制器与上位机和操作装置连接。
12.本发明另一方面提供一种上述任一项的结肠镜系统的控制方法,包括x向转向模式、z向摆动悬浮模式和悬浮进退模式;x向转向模式为:外部供电装置为两个第一横向线圈和两个第二横向线圈中与两个x向线圈平行的两个线圈通方向相反且大小相同的电流,镜体用供电装置先后为两个x向线圈和两个y向线圈通方向相同且大小相同的电流;z向摆动悬浮模式为:外部供电装置为两个纵向线圈通方向相反且大小相同的电流,镜体用供电装置为两个第一z向线圈通方向相同且大小相同电流,并且为多个z向线圈组中的两个第二z向线圈通方向相同且大小相同电流;悬浮进退模式为:外部供电装置为两个第一横向线圈和两个第二横向线圈中与两个y向线圈平行的两个线圈通方向相反且大小相同的电流,并且为两个纵向线圈通方向相反且大小相同的电流,镜体用供电装置为两个y向线圈通方向相同且大小相同的电流,为两个第一z向线圈通方向相同且大小相同的电流,为多个z向线圈组中的两个第二z向线圈通方向相同且大小相同的电流。
13.根据本发明,还包括:镜体采集的图像传送至上位机;上位机根据图像控制电源控制器驱动外部供电装置和镜体用供电装置,执行x向转向模式、z向摆动悬浮模式和悬浮进退模式。
14.根据本发明,还包括:镜体采集的图像传送至上位机;上位机显示图像;电源控制器根据操作装置的操作动作驱动外部供电装置和镜体用供电装置,执行x向转向模式、z向摆动悬浮模式和悬浮进退模式。
15.(三)有益效果本发明的有益效果是:本发明的结肠镜系统及其控制方法,采用三轴正交梯度磁场发生装置为三轴正交线圈组和多个z向线圈组提供梯度磁场环境,能够通过对三轴正交梯度磁场发生装置中的纵向线圈、第一z向线圈和多个z向线圈组通电来使镜体悬浮于患者肠道中,由此抵消镜体和镜体上线圈的自身重力,减少镜体本身对患者肠壁的压迫和摩擦,进而减少对肠道的刺激,降低患者的痛感;同时,能够通过对三轴正交梯度磁场发生装置和三轴正交线圈组通电来控制镜体头部的姿态以及驱动进镜,由此降低进镜难度。综上,本发明的结肠镜系统的进镜过程简单、快捷、更为顺滑和舒适,能够减少进镜过程对患者产生的不适感。此外,与胶囊内镜相比,本发明的结肠镜系统中的镜体状态变化更快,更具有可实施性。
附图说明
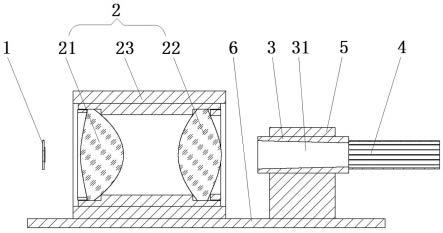
16.图1为本发明的结肠镜系统的一个实施例的结构示意图。
17.【附图标记说明】
1:镜体;2:镜体用供电装置;3:x向线圈;4:y向线圈;5:第一z向线圈;6:第二z向线圈;7:第一横向线圈;8:第二横向线圈;9:纵向线圈;10:电源控制器;11:上位机;12:操作装置;13:外部供电装置。
具体实施方式
18.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
19.参照图1,本实施例提供一种结肠镜系统,该结肠镜系统包括镜体1、三轴正交线圈组、多个z向线圈组、镜体用供电装置2、三轴正交梯度磁场发生装置、外部供电装置13、电源控制器10、上位机11和操作装置12。
20.其中,镜体1为插入到患者体内的部分。镜体1的头部带有摄像头和照明件,并设置有水汽孔。镜体1的内部形成有水汽通道、设置有用于传输摄像头数据的数据线以及用于为照明件提供光源的光纤。镜体1的常规结构为现有技术,在此不再赘述。
21.其中,三轴正交梯度磁场发生装置包括两个第一横向线圈7、两个第二横向线圈8和两个纵向线圈9,两个第一横向线圈7沿第一横向同轴排列且绕线方向相同,两个第二横向线圈8沿第二横向同轴排列且绕线方向相同,两个纵向线圈9沿纵向同轴排列且绕线方向相同。其中,“纵向”为平行于重力的方向;“第一横向”和“第二横向”彼此垂直且均垂直于“纵向”。两个第一横向线圈7和两个纵向线圈9在镜体1周向上交替排列,两个第一横向线圈7和两个纵向线圈9位于两个第二横向线圈8之间,如此,由两个第一横向线圈7、两个第二横向线圈8和两个纵向线圈9围合形成供患者胯部穿过的空间且能够在该空间内形成三轴正交梯度磁场,如图1所示,两个第一横向线圈7、两个第二横向线圈8和两个纵向线圈9围合成筒形,即形成了筒形的空间。
22.进一步,在本实施例中,第一横向线圈7呈弧状,纵向线圈9呈弧状,第二横向线圈8呈圆环状,由此,两个第一横向线圈7、两个第二横向线圈8和纵向线圈9围合形成的空间为圆筒形,如此所形成的磁场有利于后面详述的镜体1上的对镜体运动姿态和受力的控制。当然,本发明不局限于此,第一横向线圈7、第二横向线圈8和纵向线圈9的形状不局限于此,其余形状也不影响其在本发明的装置中的基本功能的实现。
23.在本实施例中,两个第一横向线圈7、两个第二横向线圈8和两个纵向线圈9围合形成的空间的直径约为80cm,以供患者的胯部穿入,但本发明不做该空间尺寸的限定,具体应用时可参照mri等现有医用成像设备的尺寸设计。
24.当然,上述“围合”并非限定相邻的第一横向线圈7、第二横向线圈8和纵向线圈9必须相连接,相邻的线圈可以绝缘相接,也可以间隔开。
25.在本实施例中,第一横向线圈7和纵向线圈9为矩形线圈弯折呈弧状,以在整体上形成较为封闭的圆筒形空间。但本发明不局限于此,第一横向线圈7和纵向线圈9可以是跑道型线圈、椭圆形线圈、圆形线圈等任意形状的线圈。
26.另外,第一横向线圈7、第二横向线圈8和纵向线圈9可以采用超导线圈,无发热问题。
27.此外,本实施例中,在镜体1的一个周向上,两个第一横向线圈7和两个纵向线圈9围绕镜体1的轴线阵列布置,即第一横向线圈7与纵向线圈9的弧度、尺寸均相同,即两个第
一横向线圈7和两个纵向线圈9各占一周的四分之一。如此,既方便了生产,又使得镜体1上的线圈电流的控制更加方便。当然,这里所说得“轴线阵列布置”指镜体最初始使用时、还未到结肠拐角处时其轴线为直线的情况下的描述。
28.此外,本发明的保护范围为至少包括两个第一横向线圈7、两个第二横向线圈8和两个纵向线圈9,可以设置大于两个的偶数个成对出现。在设置大于两个的偶数个第一横向线圈7/第二横向线圈8/纵向线圈9时,多个成对的第一横向线圈7/第二横向线圈8/纵向线圈9可以是沿着镜体1的轴向方向排列,也可以是沿着线圈自身轴线叠置。
29.在本实施例中,采用支架(图中未示出)将三轴正交梯度磁场发生装置支撑在地面上。支架可以分别支撑第一横向线圈7、第二横向线圈8和纵向线圈9。也可以在相邻线圈绝缘相接时,支架通过直接支撑一个或多个线圈而间接支撑其他线圈。其中,支架可以是专门为了本实施例的三轴正交梯度磁场发生装置而设计的单独支撑物,也可以是现有成像设备的一部分。
30.外部供电装置13与两个第一横向线圈7、两个第二横向线圈8和两个纵向线圈9分别连接,以为两个第一横向线圈7输送方向相反的电流,为两个第二横向线圈8输送方向相反的电流,为两个纵向线圈9输送方向相反的电流,以形成三轴正交梯度磁场。当然,外部供电装置13可单独为一对第一横向线圈7、一对第二横向线圈8和一对纵向线圈9中的一对输送电流,也可同时为一对第一横向线圈7、一对第二横向线圈8和一对纵向线圈9中的两对或三对输送电流,即外部供电装置13选择性地为上述每个线圈对通电或不通电,以在期望的方向上形成匀梯度磁场。
31.具体地,当外部供电装置13为两个第一横向线圈7输送方向相反且大小相同的电流时,两个第一横向线圈7、两个第二横向线圈8和两个纵向线圈9围合形成的空间(即上述供患者胯部穿入的空间)中形成第一横向梯度磁场;当外部供电装置13为两个第二横向线圈8输送方向相反且大小相同的电流时,两个第一横向线圈7、两个第二横向线圈8和两个纵向线圈9围合形成的空间(即上述供患者胯部穿入的空间)中形成第二横向梯度磁场;当外部供电装置13为两个纵向线圈9输送方向相反且大小相同的电流时,两个第一横向线圈7、两个第二横向线圈8和两个纵向线圈9围合形成的空间(即上述供患者胯部穿入的空间)中形成纵向梯度磁场。当外部供电装置13同时为一对第一横向线圈7、一对第二横向线圈8和一对纵向线圈9中的两对或三对输送电流,在两个第一横向线圈7、两个第二横向线圈8和两个纵向线圈9围合形成的空间中形成叠加的梯度磁场。外部供电装置13对上述每对线圈的电流单独控制。
32.镜体1的头部设置上述三轴正交线圈组。本实施例的三轴正交线圈组包括两个x向线圈3、两个y向线圈4和两个第一z向线圈5,两个x向线圈3位于镜体1的两侧,沿x方向同轴排列且绕线方向相同。两个y向线圈4沿y方向同轴排列且绕线方向相同。两个第一z向线圈5位于镜体1的两侧,沿z方向同轴排列且绕线方向相同。两个x向线圈3和两个第一z向线圈5在镜体1周向上交替排列,两个x向线圈3和两个第一z向线圈5位于两个y向线圈4之间,如此,由两个x向线圈3、两个y向线圈4和两个第一z向线圈5围合形成供镜体1穿过的空间,如图1所示,两个x向线圈3、两个y向线圈4和两个第一z向线圈5围合成筒形,即形成了筒形的空间。x向线圈3、y向线圈4和第一z向线圈5均固定于镜体1,可选用粘贴方式固定。其中,“z向”和“z方向”为平行于重力的方向,也即与上述“纵向”平行;“y向”和“y方向”为镜体1前进
和后退的方向;“x向”和“x方向”同时垂直于“y向”和“z向”,一般来讲,“x向”和“x方向”可理解为镜体1的左右方向。“x向”和“y向”中的一个会平行于上述“第一横向”,另一个会平行于上述“第二横向”,并且这种平行关系会随着镜体1在结肠中的运动方向的改变而改变,具体下面会详述。
33.本实施例中,x向线圈3和第一z向线圈5为与镜体1的外壁形状配合的弧状,y向线圈4为与镜体1同轴的圆环状,其中,第一横向线圈7与x向线圈3的弧度相同,纵向线圈9与第一z向线圈5的弧度相同,第二横向线圈8与y向线圈4的轴线平行,当然,这里所说得“轴线平行”指镜体最初始使用时、还未到结肠拐角处时的情况下的描述。x向线圈3、y向线圈4和第一z向线圈5均贴附于镜体1的外壁。由此,两个x向线圈3、两个y向线圈4和两个第一z向线圈5围合形成的空间为圆筒形,如此有利于对镜体运动姿态和受力的控制。在本实施例中,该空间的直径约为1cm,以配合镜体1的头部的尺寸,但本发明不做该空间尺寸的限定,具体应用时可参照适配的镜体1的尺寸设计。
34.在本实施例中,x向线圈3和第一z向线圈5为矩形线圈弯折呈弧状,以形成较为封闭的筒形空间。但本发明不局限于此,x向线圈3和第一z向线圈5可以是跑道型线圈、椭圆形线圈、圆形线圈等任意形状的线圈弯折呈弧状。
35.此外,本实施例中,在镜体1的一个周向上,两个x向线圈3和两个第一z向线圈5围绕镜体1的轴线阵列布置。即x向线圈3与第一z向线圈5的弧度、尺寸均相同,也即两个x向线圈3与两个第一z向线圈5各占一周的四分之一。如此,既方便了生产,又使得镜体1上的线圈电流的控制更加方便。
36.在本实施例中,x向线圈3、y向线圈4、第一z向线圈5的匝数均为几百量级,可选用100-200匝的范围内,此量级匝匝数的线圈,在电流有较小改变时磁力就能够及时响应。
37.此外,x向线圈3、y向线圈4和第一z向线圈5的数量不局限于两个,也可以设置大于两个的偶数个以成对出现。在设置大于两个的偶数个x/y/第一z向线圈对时,大于两个的偶数个x/y/第一z向线圈沿着镜体1的轴向方向成对排列。
38.进一步参照图1,多个z向线圈组沿镜体1的轴向排列,固定于镜体1上,且位于三轴正交线圈组的后侧。一个z向线圈组包括两个第二z向线圈6,两个第二z向线圈6位于镜体1的两侧,沿z方向同轴排列且绕线方向相同。同时,第二z向线圈6与镜体1的外壁形状配合的弧状,第二z向线圈6固定于镜体1,第二z向线圈6贴附于镜体1的外壁,可选用粘贴方式固定。具体地,第二z向线圈6为矩形线圈弯折呈弧状,但本发明不局限于此,第二z向线圈6可以是跑道型线圈、椭圆形线圈、圆形线圈等任意形状的线圈弯折呈弧状。第二z向线圈6与第一z向线圈5的长度优选相同,占一周的四分之一。第二z向线圈6的匝数为几百量级,可选用100-200匝的范围内,此量级匝数的线圈,在电流有较小改变时磁力就能够及时响应。z向线圈组是负责镜体1中除去头部的其他部分的悬浮,因此z向线圈组的数量和位置根据镜体1中除去头部的其他部分的重量和长度来设置。其中,镜体1的重量包括镜体1的管状本体的重量以及管状本体上和内部设置的摄像头、照明部件、光纤、数据线等部件的重量。镜体1上的上述x向线圈3、y向线圈4、第一z向线圈5和第二z向线圈6均由外皮包裹,保证镜体1整体光滑。
39.镜体用供电装置2与两个x向线圈3、两个y向线圈4、两个第一z向线圈5和所有第二z向线圈6分别连接,以为两个x向线圈3输送方向相同电流,为两个y向线圈4输送方向相同
电流,为两个第一z向线圈5输送方向相同电流,为所有第二z向线圈6输送方向相同电流,使得每一对线圈形成一个磁偶极子,并且每对线圈的电流单独控制,即镜体用供电装置2选择性地为上述每对线圈通电或不通电。
40.电源控制器10与镜体用供电装置2、外部供电装置13、上位机11和操作装置12连接。电源控制器10控制镜体用供电装置2和外部供电装置13输出电流。操作装置12通过有线或无线方式连接电源控制器10,操作装置12上设有上下、左右、前后进镜操作按键,医生通过驱动操作装置12上的操作按键来控制电源控制器10对线圈的供电。镜体1头部的摄像机连接上位机11,上位机11能够接收镜体1头部摄像机的图像,上位机11也可以控制电源控制器10通过外部供电装置13和镜体用供电装置2对x向线圈3、y向线圈4、第一z向线圈5、第二z向线圈6、第一横向线圈7、第二横向线圈8、纵向线圈9供电。
41.本实施例的结肠镜系统的控制方法包括x向转向模式、z向摆动悬浮模式和悬浮进退模式,下面详细说明。
42.悬浮进退模式:外部供电装置13向两个纵向线圈9通方向相反且大小相同的电流,镜体1处于纵向梯度磁场中。镜体用供电装置2向镜体1上的所有第二z向线圈6通方向相同且大小相同的电流,向两个第一z向线圈通方向相同且大小相同的电流,两个第一z向线圈形成一个磁偶极子,每个z向线圈组中的两个第二z向线圈6形成一个磁偶极子,磁偶极子的磁场n极方向与两个纵向线圈9中位于上方的纵向线圈9产生的磁场方向相同,如此镜体1的上述磁偶极子受到一个z方向(向上)的磁力,两个第一z向线圈产生的磁力的大小与所有z向线圈组产生的磁力的大小之和等于镜体1和镜体1上线圈的重力之和,镜体1悬浮。其中,第一z向线圈5的电流大小取决于镜体1的头部和头部处的部件的重量之和,第二z向线圈6的电流大小取决于其所在位置的镜体1的部分的重量。因此,第一z向线圈5和第二z向线圈6的尺寸、匝数以及通电时的电流可以设计的不同。
43.同时,在初始时以及后续镜体1在结肠中做第二个转弯后,“y向”平行于“第二横向”,外部供电装置13向两个第二横向线圈8通方向相反且大小相同的电流,镜体1处于第二横向梯度磁场中。镜体用供电装置2向镜体1上的两个y向线圈4通方向相同且大小相同的电流,两个y向线圈4形成一个磁偶极子,在第二横向梯度磁场作用下受到一个y向的磁场力,牵引镜体1前后移动。
44.镜体1在结肠中做第一个转弯和第三个转弯后,“第一横向”平行于“y向”,此时,外部供电装置13向两个第一横向线圈7通方向相反且大小相同的电流,镜体1处于第一横向梯度磁场中。镜体用供电装置2向镜体1上的两个y向线圈4通方向相同且大小相同的电流,两个y向线圈4形成一个磁偶极子,在第一横向梯度磁场作用下受到一个y向的磁场力,牵引镜体1前后移动。
45.综上,在悬浮进退模式中,形成外部磁场的所通电的横向线圈为第一横向线圈7和第二横向线圈8中与y向线圈4平行的横向线圈。
46.在悬浮进退模式,镜体1处在纵向梯度磁场和横向梯度磁场的叠加磁场中,为了克服横向梯度磁场和纵向梯度磁场的共同作用对镜体产生的扭矩,将镜体1的结构构造为使得镜体1在轴向上呈柔性、在径向上呈刚性,比如镜体1包括橡胶软管和在其内部添加的钢材质螺线管和/或钢丝网。镜体1在轴向上呈柔性,以便于镜体1的头部的姿态和移动方向的
改变。镜体1在径向上呈刚性,以防止镜体1发生影响结肠镜成像的扭转。当然,不可防止的是镜体1在横向梯度磁场和纵向梯度磁场的共同作用下会发生微量扭转,但此扭转在镜体1的结构有上述选择时不会对结肠镜的移动有大的影响。
47.z向摆动悬浮模式为:外部供电装置13向两个纵向线圈9通方向相反且大小相同的电流,镜体1处于纵向梯度磁场中,镜体用供电装置2向镜体1上的两个第一z向线圈5通方向相同且大小相同的电流,两个第一z向线圈5形成一个磁偶极子,在纵向梯度磁场作用下受到一个z向的磁场力,驱动镜体1头部上下摆动。同时,镜体用供电装置2向所有第二z向线圈通方向相同且大小相同电流,每对第二z向线圈6形成一个磁偶极子,在纵向梯度磁场作用下受到一个z向的磁场力,结合第一z向线圈5所受到的磁场力,镜体1悬浮。
48.x向转向模式为:因人体结肠为具有4个约90
°
的拐角,故镜体1的左右转向需能够转动约90
°
,因此,在初始、转过结肠的第二个拐角、转过结肠的第四个拐角时,“x向”平行于“第一横向”;在转过结肠的第一个拐角、转过结肠的第三个拐角时,“x向”便平行于“第二横向”。
49.在“x向”平行于“第一横向”,“y向”平行于“第二横向”时,也即x向线圈与第一横向线圈7对应,y向线圈与第二横向线圈8对应时:外部供电装置13向第一横向线圈7供电,镜体1处于第一横向梯度磁场中,镜体用供电装置2先向镜体1上的两个x向线圈3通方向相同且大小相同的电流,两个x向线圈3形成一个磁偶极子,在第一横向梯度磁场作用下受到一个x向的磁场力,镜体1头部向左/右摆动一定角度,然后镜体用供电装置2停止向镜体1上的两个x向线圈3供电,再向镜体1上的两个y向线圈4通方向相同且大小相同的电流,y向线圈4在第一横向梯度磁场下具有磁力矩,该磁力矩驱动镜体1的头部继续向左/右摆动,基本上镜体1的头部摆动90
°
后,x向线圈3与第二横向线圈8对应,y向线圈4与第一横向线圈7对应。
50.在“x向”平行于“第二横向”,“y向”平行于“第一横向”时,也即x向线圈与第二横向线圈8对应,y向线圈与第一横向线圈7对应时:外部供电装置13向第二横向线圈8供电,镜体1处于第二横向梯度磁场中,镜体用供电装置2先向镜体1上的两个x向线圈3通方向相同且大小相同的电流,两个x向线圈3形成一个磁偶极子,在第二横向梯度磁场作用下受到一个x向的磁场力,镜体1头部向左/右摆动一定角度,然后镜体用供电装置2停止向镜体1上的两个x向线圈3供电,再向镜体1上的两个y向线圈4通方向相同且大小相同的电流,y向线圈4在第二横向梯度磁场下具有磁力矩,该磁力矩驱动镜体1的头部继续向左/右摆动,基本上镜体1的头部摆动90
°
后,x向线圈3与第一横向线圈7对应,y向线圈4与第二横向线圈8对应。
51.综上,在x向转向模式中,形成外部磁场的所通电的横向线圈为第一横向线圈7和第二横向线圈8中与x向线圈3平行的横向线圈。
52.此外,在x向转向模式中,可让镜体1悬浮,也可不让镜体1悬浮。如让镜体1悬浮,即在x向转向模式中,外部供电装置13向两个纵向线圈9通方向相反且大小相同的电流,镜体1处于纵向梯度磁场中,镜体用供电装置2向镜体1上的所有两个第二z向线圈6通方向相同且大小相同的电流,向两个第一z向线圈5通方向相同且大小相同的电流,两个第一z向线圈5形成一个磁偶极子,两个第二z向线圈6形成一个磁偶极子,磁偶极子的磁场n极方向与两个
纵向线圈9中位于上方的纵向线圈9产生的磁场方向相同,如此镜体1的上述磁偶极子受到一个z方向(向上)的磁力,两个第一z向线圈5产生的磁力的大小与所有z向线圈组产生的磁力的大小之和等于镜体1和镜体1上线圈的重力之和,镜体1悬浮。
53.而在何时启动上述三个模式中的一个,可通过如下两种方式判断:第一种方式:镜体采集的图像传送至上位机11,上位机11中预先设置有算法,上位机11根据图像运用算法识别镜体1的头部所在的位置,根据情况(需要前进、需要z向摆头、需要x向转向)控制电源控制器10驱动外部供电装置13和镜体用供电装置2,执行x向转向模式、z向摆动悬浮模式和悬浮进退模式。
54.第二种方式:镜体采集的图像传送至上位机11;上位机11显示图像,医生根据图像辨别镜体1的头部所处的位置,医生根据情况(需要前进、需要z向摆头、需要x向转向)操作操作装置12的按键,电源控制器10接收操作装置12的操作动作;电源控制器10根据操作装置12的操作动作驱动外部供电装置13和镜体用供电装置2,执行x向转向模式、z向摆动悬浮模式和悬浮进退模式。
55.综上,本实施例的结肠镜系统及其控制方法,采用三轴正交梯度磁场发生装置为三轴正交线圈组和多个z向线圈组提供梯度磁场环境,能够通过对三轴正交线圈组中的z向线圈以及多个z向线圈组通电来使镜体1悬浮于患者肠道中,同时,能够通过对三轴正交线圈组通电来控制镜体1头部的姿态以及驱动进镜,即提供了一种磁驱动、悬浮式进镜的结肠镜,可抵消镜体1和镜体1上线圈的自身重力,减少镜体1本身对患者肠壁的压迫和摩擦,进而减少对肠道的刺激,降低患者的痛感,同时降低进镜难度。综上,本发明的结肠镜系统的进镜过程简单、快捷、更为顺滑和舒适,能够减少进镜过程对患者产生的不适感。
56.此外,与胶囊内镜相比,本实施例的结肠镜系统保留了传统结肠镜的优点,即,为有源内镜,动力充足,控制灵活,可利用水汽清洗镜头以让视野更清晰,能够采集活检样本,能够用于手术。如上优点,都是胶囊内镜不具有的。同时,胶囊内镜是通过控制外部磁场的大小和方向来控制胶囊内镜的姿态和运动,外部磁场的线圈尺寸大(为套在患者外,直径在几十厘米以上),绕线匝数大(约1000-2000匝),电流高,这就导致需要外部磁场线圈的电流做较大的变化才能让胶囊内镜的姿态和运动产生期望的变化,同时这种大线圈又有非常大的阻抗,如此胶囊内镜的姿态和运动变化速度慢,且外部磁场线圈(如果不用超导线圈的话)的发热量大(约几百-几千瓦)。而本实施例的结肠镜系统是改变位于患者体内的镜体1上的线圈的电流来控制镜体1的姿态和运动,因为镜体1上的线圈匝数、电流和尺寸都远小于胶囊内镜的外部磁场线圈,所以本实施例的结肠镜系统的镜体1的姿态和运动的变化速度比胶囊内镜要快很多,控制灵敏。因此,本实施例的结肠镜系统中的镜体1的状态变化相比于胶囊内镜更快,更具有可实施性。
57.以上内容仅为本发明的较佳实施例,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。