1.本发明涉及光学仪器技术领域,具体涉及到一种高精度的旋转刀片狭缝装置。
背景技术:
2.狭缝是利用光的衍射、干涉及不同物质吸收不同波段光谱等光的物理性能进行测量、分析等应用时所必须的通光结构。随着第四代同步辐射光源的建设和应用,一些同步辐射光束线技术对光束尺寸和位置准确性要求达到了纳米(nm)量级或埃的量级,如纳米结构探针线站、纳米成像线站、相干衍射线站、x射线光子关联谱线站等等。面对如此高的光斑尺寸和位置准确性要求,要尽可能地提高光学元件的精确度。
3.目前,绝大部分光源所使用的狭缝多采用步进电机驱动刀片材料平移的方式实现狭缝的关闭和打开功能。例如公开号为cn211855559u的中国实用新型专利公开了一种连续自动调节的单色仪狭缝装置,来获得宽度均匀的狭缝。但是上述专利中采用的丝杆电机一般最小分辨率为1微米,在一些微米级以上的高精度的光学仪器设备中,这种平动狭缝的精确度是无法满足要求的。
技术实现要素:
4.本发明所要解决的技术问题在于如何提供一种高精度狭缝装置。
5.为解决上述技术问题,本发明提供如下技术方案:
6.一种高精度的旋转刀片狭缝装置,包括真空盒和至少一组狭缝结构,所述真空盒相对应的两侧壁分别设置有入光口和出光口;
7.所述狭缝结构包括转动机构和刀片,两个转动机构一端设置在真空盒外部,每个转动机构的输出端伸入所述真空盒内部并连接所述刀片,两个刀片对称设置,两个刀片之间间隙为狭缝宽度h,驱动所述转动机构带动所述刀片转动来改变狭缝宽度大小。
8.本发明中采用转动机构转动刀片相对于现有的刀片平动能够大大提高狭缝装置的精度,满足高精度的狭缝要求,使得该狭缝装置能够广泛应用到高精密的光学仪器中。
9.优选地,所述转动机构包括转动马达、主动轮、从动轮和转动轴,所述转动马达固定在真空盒外壁,所述转动马达的输出端连接主动轮,所述从动轮能够转动的设置在真空盒外壁并与主动轮啮合,所述转动轴一端同轴连接从动轮,另一端伸入真空盒内部连接所述刀片。
10.优选地,所述狭缝结构设置有两组,一组狭缝结构水平设置,另一组狭缝结构竖向设置。
11.优选地,所述刀片为片状刀片。
12.优选地,所述刀片为圆柱状,所述刀片上设有多组刀刃形成螺线形状,相邻之间的刀刃的长边与长边之间的长度差为a,每个刀刃与刀片的转动中心形成的夹角均为b,转动机构每旋转一次b导致狭缝宽度h增加2*a。
13.发明中采用转动机构转动刀片相对于现有的刀片平动能够大大提高狭缝装置的
精度,满足高精度的狭缝要求,使得该狭缝装置能够广泛应用到高精密的光学仪器中。
14.优选地,所述刀刃由碳化钨材质制成。
15.优选地,所述狭缝宽度h为100nm,a为10nm,b为0.36
°
。
16.优选地,所述狭缝宽度h为100nm,a为5nm,b为0.18
°
。
17.优选地,所述狭缝宽度h为50nm,a为5nm,b为0.18
°
。
18.与现有技术相比,本发明的有益效果是:
19.1、本发明中采用转动机构转动刀片相对于现有的刀片平动能够大大提高狭缝装置的精度,满足高精度的狭缝要求,使得该狭缝装置能够广泛应用到高精密的光学仪器中。
20.2、通过采用多组刀刃形成螺线形状的刀片和刀片旋转运动配合,螺线形状的刀片可以获得线性的狭缝开口距离,狭缝精度不随着刀片转动角度变化而变化,能够进一步的提高该狭缝装置的精度。
附图说明
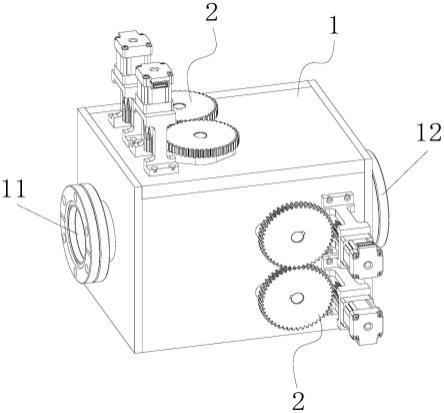
21.图1为本发明实施例一的一种高精度的旋转刀片狭缝装置的结构示意图;
22.图2为本发明实施例一的局部结构示意图;
23.图3为本发明实施例一刀片转动示意图;
24.图4为本发明实施例二刀片转动示意图。
具体实施方式
25.为便于本领域技术人员理解本发明技术方案,现结合说明书附图对本发明技术方案做进一步的说明。
26.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接,还可以是通信;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
27.在本技术中,除非另有明确的规定和限定,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
28.实施例一:
29.参阅图1至图2,本实施例公开了一种高精度的旋转刀片狭缝装置,包括真空盒1和两组狭缝结构2,所述真空盒1相对应的两侧壁分别设置有入光口11和出光口12形成光束线的x光真空飞行通道;一组狭缝结构2水平设置,实现狭缝水平开口尺寸,另一组狭缝结构2竖向设置,实现狭缝竖向开口开口尺寸。
30.所述狭缝结构2包括转动机构21和刀片22,两个转动机构21一端设置在真空盒1外部,每个转动机构21的输出端伸入所述真空盒1内部并连接所述刀片22,两个刀片22对称设置,两个刀片22之间间隙为狭缝,驱动所述转动机构21带动所述刀片22转动来改变狭缝宽度大小。
31.所述转动机构21包括转动马达211、主动轮212、从动轮213和转动轴214,所述转动马达211固定在真空盒1外壁,所述转动马达211的输出端连接主动轮212,所述从动轮213能够转动的设置在真空盒1外壁并与主动轮212啮合,所述转动轴214一端同轴连接从动轮213,另一端伸入真空盒1内部连接所述刀片22。
32.参阅图3,所述刀片22为片状刀片,刀片22的端部刀头到刀片22的转动中心距离为r,刀片22由现有的步进马达驱动的平动变成由转动马达211转动而产生的转动,旋转θ角后刀片22端部的刀头抬起的距离等于δh=r-r*cosθ=r(1-cosθ),则狭缝宽度为h=2*δh=2r(1-cosθ),很明显,只需要控制转动马达211的转动角度来控制狭缝宽度。如下表所示:
[0033] 1-cosθr(1-cosθ)(m)1-cos0.1
°
1.52e-61.52e-81-cos0.2
°
6.09e-66.09e-81-cos0.3
°
13.71e-613.71e-81-cos0.01
°
1.52e-81.52e-101-cos0.02
°
6.09e-86.09e-101-cos0.03
°
13.71e-813.71e-10
[0034]
具体的,以刀片22的端部刀头到刀片22的转动中心距离为r为1cm时,仅需转动马达211旋转精度达到0.1
°
就能够获得15nm的精度,若是使用转动精度为0.01
°
的转动马达211,就能获得0.15nm的精度,而旋转精度达到0.01
°
的转动马达211在市场中是很容易购买得到的。
[0035]
很明显,通过上述实施例得到本发明中采用转动机构21转动刀片22相对于现有的刀片平动能够大大提高狭缝装置的精度,满足高精度的狭缝要求,使得该狭缝装置能够广泛应用到高精密的光学仪器中。
[0036]
实施例二
[0037]
参阅图4,本实施例与实施例一不同的是,所述刀片22为圆柱状,所述狭缝宽度为h,所述刀片22上设有多组刀刃221形成螺线形状,相邻之间的刀刃的长边与长边之间的长度差a=a
1-a2,其中a1为前一个刀刃的长边长度,a2为后一个刀刃的长边长度。
[0038]
每个刀刃221与刀片22的转动中心形成的夹角均为b角,转动机构21每旋转一次b导致狭缝宽度h增加2*a。
[0039]
在本实施例中,刀片0
°
时狭缝宽度为0,刀片转动180
°
时为狭缝最大宽度;进一步的,以狭缝最大宽度为h为10μm,精度要求为10nm,则相邻之间的刀刃221间距a为10nm,转动机构21每旋转一次b满足一个精度要求。
[0040]
狭缝宽度为h=2*a*n;
[0041]
其中n为精度要求的倍数;
[0042]
狭缝最大宽度h=2*10*n=10000nm时,计算得到n=500,则b=180
°
/500=0.36
°
,即转动机构21每旋转一次0.36
°
跟换一组刀刃221来满足10nm的一个精度要求。
[0043]
具体的,当狭缝宽度h要求为100nm时,n=h/2/a=100/2/10=5次,则旋转机构21需要带动刀片22旋转5个精度要求得到100nm的狭缝宽度,即旋转10次0.18
°
。
[0044]
本实施例通过采用多组刀刃221形成螺线形状的刀片22和刀片22旋转运动配合,螺线形状的刀片22可以获得线性的狭缝开口距离,狭缝精度不随着刀片22转动角度变化而
变化。而片状刀刃的开口精度则会随着角度变化而变化,或者是为了获得相应的精度在高角度下需要非常高的角度精度,增加了成本。比如对于角度步长为0.36
°
的狭缝,在36
°
时,螺线型刀刃每走单位角度获得的步长精度仍然是相同的(1-cos0.36
°
)=0.00002;而片状刀片的精度则变为(cos36
°‑
cos36.36
°
)=0.00371,精度变大了185.5倍,或者为了获得相同的精度要求,转动角度变为36.00195
°
,对于角度的精度要求大幅度提高几个数量级,因此通过螺线形状的刀片22的设置进一步的提高该狭缝装置的精度。
[0045]
实施例三:
[0046]
在本实施例中,刀片0
°
时狭缝宽度为0,刀片转动180
°
时为狭缝最大宽度;进一步的,以狭缝最大宽度为h为10μm,精度要求为5nm,则相邻之间的刀刃221间距a为5nm,转动机构21每旋转一次b满足一个精度要求。
[0047]
狭缝宽度为h=2*a*n;
[0048]
其中n为精度要求的倍数;
[0049]
狭缝最大宽度h=2*5*n=10000nm时,计算得到n=1000,则b=180
°
/1000=0.18
°
,即转动机构21每旋转一次0.18
°
跟换一组刀刃221来满足的5nm一个精度要求。
[0050]
具体的,当狭缝宽度h要求为100nm时,n=h/2/a=100/2/5=10次,则旋转机构21需要带动刀片22旋转10个精度要求得到100nm的狭缝宽度,即旋转10次0.18
°
。
[0051]
实施例四:
[0052]
在本实施例中,刀片0
°
时狭缝宽度为0,刀片转动180
°
时为狭缝最大宽度;进一步的,以狭缝最大宽度为h为10μm,精度要求为5nm,则相邻之间的刀刃221间距a为5nm,转动机构21每旋转一次b满足一个精度要求。
[0053]
狭缝宽度为h=2*a*n;
[0054]
其中n为精度要求的倍数;
[0055]
狭缝最大宽度h=2*5*n=10000nm时,计算得到n=1000,则b=180
°
/1000=0.18
°
,即转动机构21每旋转一次0.18
°
跟换一组刀刃221来满足的5nm一个精度要求。
[0056]
具体的,当狭缝宽度h要求为50nm时,n=h/2/a=50/2/5=5次,则旋转机构21需要带动刀片22旋转5个精度要求得到50nm的狭缝宽度,即旋转5次0.18
°
。
[0057]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0058]
以上所述实施例仅表示发明的实施方式,本发明的保护范围不仅局限于上述实施例,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。