1.本发明涉及本发明涉及自动化灌装控制技术领域,尤其涉及一种基于动态校验控制的液态化学品定量桶装的自动灌装方法及系统。
背景技术:
2.液态油漆、有机涂料、稀释剂等由于其易挥发、易燃、有一定毒害等属性,而被纳入被严格安全管控的危险化学品。危险化学品(简称危化品)是指具有毒害、腐蚀、爆炸、燃烧、助燃等性质,对人体、设施、环境具有危害的剧毒化学品和其他化学品。油漆等液态危化品在生产、灌装、运输及使用过程中,均必须严格的遵守相应的安全管理规定。
3.现有的油漆灌装机的定量灌装方式一般分为定重式(称重式)灌装或定容式灌装,其中称重式灌装最为常用,两种灌装方式一般都是各自独立运作。如现有技术中申请号为cn201920586731.7的专利文献所公开的一种浆料的自动灌装装置,即采用了单一的称重灌装模式。为了提高全机的的自动化程度,一般还会选配理桶系统、上盖压盖系统、码垛系统等。全自动灌装设备一般可实现上桶、灌装、上盖压盖、码垛的全自动化,可极大的节约人力资源,并降低人工干预而导致的误差。
4.目前,液态化学品灌装生产企业大都是根据jjg687-2008《液态物料定量灌装机检定规程》的相关要求,定期对液态物料定量灌装机的设备外观、协调性能、控制性能、灌装准确性、灌装能力以及合格率等方面进行检测,以全方位了解液态物料定量灌装机的运行状态、性能,其通常采用定期检测、人工的方式,难以发现自动化生产中实时发生的问题,同时检查后的效果也不稳定。
5.由于液态物料的容重与温度变化密切相关,温度升高则容重变大,温度降低则容重变小,因此虽然容量未发生变化,但灌装质量已经出现误差。油漆等有机涂料属于碳氢化合物,此类液体在灌装过程中受温度的影响较大,温度变化时其体积会发生明显变化,进而非常容易导致计量误差超差。为了克服这一问题,现有技术一般是在灌装时通过控制灌装时的环境(车间)温度,使灌装温度与标准温度的误差不超过
±
5℃,才能避免出现计量误差超差的问题,但是,这必然会导致生产成本的大幅增加。
6.除油漆涂料等液态物料随着温度变化,会增加计量的误差外,灌装设备、桶装容器等也会随着外部温度变化、自身膨胀、灌装过程中的振动等多方面因素,也会引起灌装设备的计量准确性的变化;在同一天、不同时段的灌装生产,往往不能保持动态的持续、可靠的计量准确性,容易造成各工位、各批次生产的灌装量无法保持一致。为了保持灌装设备的准确性,现有技术中,通常需要定期、人工对灌装机温度检测以及温度误差修正系统进行检查,才能确保灌装设备运行正常;在灌装时必须保持环境温度的稳定,才能降低或者消除因温度变化对灌装量造成的不利影响。但是,温度检测与温度误差修正系统检查,需要停机运行,往往是人工进行,影响生产,而且其修正效果也不稳定。
7.液态物料定量灌装设备在运行过程中,实际灌装量受液态物料温度的影响,灌装时温度以及密度设定不能以液态物料实际温度、密度为准,否则会导致灌装机按照液态物
料实际温度进行灌装,一旦物料温度发生变化会导致灌装量误差超差。针对这种情况,在检定过程中需要对灌装机温度检测以及温度误差修正系统进行检查,确保其运行正常,在灌装时可根据液态物料实际温度及时调整,消除因温度变化对灌装量造成的影响。
8.现有独立运行的自动化称重式灌装与定容式灌装控制系统,均存在着一个难以克服的问题,即其采用单一种类和单元的压式称重传感器(称重模块)等与传输、控制电路,在较差的工作环境下,或者在长期的生产过程中,不可避免的会发生工况变化和数据偏移,导致精度下降、错误报警等问题,影响整个灌装系统长期工作时的稳定性、精准性和可靠性;而如发生称重传感器过载、模块间连接不稳、未对称产生的误差以及温度超出正常范围等错误会被长时间忽视,则很容易会导致批次超过正常规格以及产品质量不过关,也会进一步导致企业损失和名誉受损。为了克服这一问题,现有技术中,大多另外增加一套可独立运行的持续监测系统,专门对称重传感系统的准确性进行监测,以持续跟踪判断、验证称重传感系统的准确性;但是其也进一步带来了新的问题,即该持续监测系统也是依赖于各类电子传感器,其自身长期工作的准确性并不能被及时的感知。由此,其对于称重传感系统的准确性进行监测的稳定性、可靠性与精确性,不能得到持续的监测和验证,因此并不能从跟不上解决问题。
9.综上所述,现有灌装设备运行及检定过程中,计量误差超差、传感数据错误等问题相对比较常见,技术人员往往无法同时、动态的发现和解决这些问题,使灌装设备保持精准的运行状态,确保达到灌装质量标准,保障企业与用户的利益。
技术实现要素:
10.本发明的目的在于针对上述的不足,提供一种基于动态校验控制的液态化学品定量桶装的自动灌装方法及系统,通过对设备组成、结构及控制算法等同步改进,重点解决多种因素引发的误差超差问题,以及采用单一采用定重量或定容量工作模式时,出现传感数据偏移误差无法及时发现和动态调整的问题。
11.本发明提供的技术方案如下:一种基于动态校验控制的液态化学品定量自动灌装方法,其特征在于,其包括如下步骤:s1:设置一与液态化学品供料管线相连通的双模控制的液态化学品定量自动灌装生产线,该生产线至少包括一个灌装工位,该灌装工位包括设置在支架上的灌装管路、升降机构、灌装机构,及设置在该灌装机构正下方的桶装容器与地磅;所述的升降机构上设置有伺服电机,所述的灌装机构设置在升降机构上,并随其上下左右移动;所述的灌装管路上设有流量控制阀,用于控制管路内的液体流速并感知液体流量;所述的灌装机构上设置有一前端控制器、一灌装枪及桶装容器内液体容量变化传感单元;所述的地磅上设置有桶装容器内液体重量变化传感单元;所述的前端控制器分别与所述的伺服电机、流量控制阀、容量变化传感单元、重量变化传感单元连接;所述的前端控制器内置有式1所示的单工位校验实时控制程序:式1e—允许误差,0.95≤e≤1.05;
vi—桶装容器内液体容量的实时感知值;mi—桶装容器内液体质量实时感知值;s2:启动所述生产线的至少一个灌装工位,将空的桶装容器与地磅设置在灌装机构正下方,前端控制器控制伺服电机将灌装枪送入桶装容器内的初始灌装位置,采集此时静止状态下的容量变化传感单元、重量变化传感单元的初始数据,并代入到式1中,得到e的初始值;如该e的初始值不在设定的范围内,则对容量变化传感单元、重量变化传感单元的传感器进行自动校准;s3:前端控制器控制流量控制阀开启、开始灌装,由容量变化传感单元传感的数据计算得到进入到桶装容器内的液体体积vi2,由重量变化传感单元传感的数据计算得到进入到桶装容器内的液体重量mi;分别将得到的数据vi与mi代入到式1中,计算其导数的比值得到误差值e,并判断e是否在设定的范围内,如误差值e在设定的范围内,则继续均速灌装,直至vi达到目标灌装容量v0,或者mi达到目标灌装重量mo,则停止灌装、伺服电机将灌装枪移出到桶装容器之外,进行下一桶装容器的灌装;s4:如误差值e超出设定的范围内,则改变灌装流速进行灌装3-5秒钟,对两组传感数据进行交互校验、确定可靠数据,分别出计算实时数据dvi2与dmi的值,取两个数值中一个较小的数据为可靠数据,继续灌装,直至达到目标灌装容量或重量;当前桶装容器灌装完毕后,对出现偏离较大的数值对应的传感单元或流量控制阀,进行校准,重复步骤s2-s4。
12.所述的基于动态校验控制的液态化学品定量自动灌装方法,其特征在于,其还包括如下步骤:所述的步骤s1中,该前端控制器为plc控制器,其还内置有两种同步运行、相互的独立工作的数据交互校验程序,并在步骤s3中被执行;所述的步骤s3的灌装过程中,在采用定容灌装模式时,校验方法为:将获取的mi数值代入到式1中,计算得到理论的vi数值,再与实际传感获取的vi数值进行比较,如误差在设定的范围内,则两组传感单元均为正常工作状态;反之,则其中一组为异常状态,进行校准后再继续灌装;所述的步骤s3的灌装过程中,在采用定重灌装模式时,校验方法为:将获取的vi数值代入到式1中,计算得到理论的mi数值,再与实际传感获取的mi数值进行比较,如误差在设定的范围内,则两组传感单元均为正常工作状态;反之,则其中一组为异常状态,进行校准后再继续灌装。
13.所述基于动态校验控制的液态化学品定量自动灌装方法,其特征在于,所述的步骤s3、s4,还包括如下步骤:s31:前端控制器控制流量控制阀开启、开始灌装,并且由该流量控制阀的数据计算出进入到桶装容器内的液体体积vi1,同时由容量变化传感单元传感的数据计算得到进入到桶装容器内的液体体积vi2,然后计算得到 vi=vi1 vi2;由重量变化传感单元传感的数据计算得到进入到桶装容器内的液体重量mi;分别将得到的数据vi与mi代入到式1中,计算其导数的比值得到误差值e,并判断e是否在设定的范围内,如误差值e在设定的范围内,则继续均速灌装,直至vi达到目标灌装容量v0,或者mi达到目标灌装重量mo,则停止灌装、伺服电机将灌装枪移出到桶装容器之外,进行下一桶装容器的灌装;s41:如误差值e超出设定的范围内,则改变灌装流速进行灌装3-5秒钟,对三个传
感数据进行交互校验、确定可靠数据,分别计算实时数据dvi1、dvi2与dmi的值,以三个数值中两个接近且较小的数据为可靠数据,继续灌装,直至达到目标灌装容量或重量;当前桶装容器灌装完毕后,对出现偏离较大的数值对应的传感单元或流量控制阀,进行校准,重复步骤s2-s4。
14.所述的基于动态校验控制的液态化学品定量自动灌装方法,其特征在于,其还包括如下步骤:s12:该生产线包括n 1个灌装工位,n为大于1的自然数,各工位的灌装机构上设有温度传感器;该生产线还包括一远程控制计算机,所述的远程控制计算机分别与各灌装工位的前端控制器连接,并且内置有多工位校验实时控制程序式2:式2式中:δv—灌装枪灌装量的允许容量误差;v
0
—目标灌装容量值;v
i
—桶装容器内液体容量实时感知值;m
i
—桶装容器内液体质量实时感知值;ρ—灌装液体的平均密度;β—灌装枪的体胀系数,(/℃);t—灌装时液体的温度,℃;s22:同时启动所述生产线的多个灌装工位,分别将各工位上空的桶装容器与地磅设置在灌装机构正下方,各工位的前端控制器控制伺服电机将灌装枪送入桶装容器内的初始灌装位置,采集此时静止状态下的容量变化传感单元、重量变化传感单元的初始数据,并代入到式1中,得到e的初始值,并传输至远程控制计算机内,如有部分工位e的初始值不在设定的范围内,则指令该工位前端控制器,对容量变化传感单元、重量变化传感单元的传感器进行自动校准;s32:所述的远程控制计算机指令各工位的前端控制器,分别根据式1分别控制对应的工位进行灌装,分别控制对应工位的流量控制阀开启、开始灌装,直至vi达到目标灌装容量v0,或者mi达到目标灌装重量mo,则停止灌装、伺服电机将灌装枪移出到桶装容器之外,进行下一桶装容器的灌装;各工位前端控制器将实时获取的数据t、 vi、m
i
,传输给所述的远程控制计算机,由该远程控制计算机自动匹配式2中的参数ρ、β,自动计算并记录本批次各工位灌装结束时的δv数据;s42:以v
0
为中心值,对全部工位灌装结束时的δv数据进行编组和离散度分析,得到该数组的集中趋势的测度值;使用离散系数对多个批次灌装得到的多路、多组数据进行统计分析,根据分析结果排查该生产线及多个灌装工位产生灌装误差的因素,以进行调整。
15.所述的前端控制器为plc控制器;所述的桶装容器内液体容量变化传感单元,包括设置在灌装枪上、朝向下方的垂直测距传感器,以及所述升降机构一侧的高位感应开关、原点感应开关、低点感应开关;所述桶装容器内液体重量变化传感单元,包括设置在地磅上的
称重传感器。
16.一种实施前述方法的基于动态校验控制的液态化学品定量自动灌装系统,其特征在于,其包括:一与液态化学品供料管线相连通的双模控制的液态化学品定量自动灌装生产线,该生产线至少包括一个灌装工位,该灌装工位包括设置在支架上的灌装管路、升降机构、灌装机构,及设置在该灌装机构正下方的桶装容器与地磅;所述的升降机构上设置有伺服电机,所述的灌装机构设置在升降机构上,并随其上下左右移动;所述的灌装管路上设有流量控制阀,用于控制管路内的液体流速并感知液体流量;所述的灌装机构上设置有一前端控制器、一灌装枪及桶装容器内液体容量变化传感单元;所述的地磅上设置有桶装容器内液体重量变化传感单元;所述的前端控制器分别与所述的伺服电机、流量控制阀、容量变化传感单元、重量变化传感单元连接;所述的前端控制器内置有单工位校验实时控制程序。
17.所述生产线包括n 1个灌装工位,n为大于1的自然数, 各工位的灌装机构上设有温度传感器;该生产线还包括一远程控制计算机,所述的远程控制计算机分别与各灌装工位的前端控制器连接,并且内置有多工位校验实时控制程序。
18.所述的生产线具体包括plc控制器、灌装机构、升降机构、机器视觉检测机构、voc抽气装置、接漏装置、地磅及信号传感单元,所述灌装机构、voc抽气装置分别与所述升降机构竖向滑动连接,所述接漏装置与所述升降机构的下端横向滑动连接;所述灌装机构包括灌装枪、设于所述灌装枪上部的灌装开阀装置,所述灌装枪的下端穿设于所述voc抽气装置的中部,并与其竖向滑动连接,所述灌装开阀装置设有进料口,所述进料口通过所述灌装开阀装置与所述灌装枪连通,所述灌装枪具有灌装嘴,所述信号传感单元包括称重传感器、高位感应开关、原点感应开关、低点感应开关,所述高位感应开关、原点感应开关、低点感应开关、测距传感器、由上往下依次设在所述升降机构的一侧;所述地磅设在所述灌装机构的正下方,所述称重传感器设在所述地磅上,所述灌装机构、升降机构、机器视觉检测机构、voc抽气装置、接漏装置、地磅、信号传感单元分别与所述plc控制器通讯连接,所述灌装机构、地磅接地线。
19.所述基于动态校验控制的液态化学品定量自动灌装系统,其特征在于,还包括竖向位置检测机构,所述竖向位置检测机构包括竖向位置摄像头、竖向位置刻度板,所述竖向位置刻度板设在所述升降机构的一侧,所述竖向位置摄像头设在所述灌装机构的上端,并跟随所述灌装机构的升降与所述竖向位置刻度板的刻度水平相朝对,所述高位感应开关、原点感应开关、低点感应开关由上往下依次设在所述竖向位置刻度板上,所述竖向位置摄像头与所述plc控制器通讯连接。
20.所述升降机构包括伺服电机、竖向滑轨、拖链,所述灌装机构与所述竖向滑轨竖向滑动连接,所述伺服电机通过所述拖链与所述灌装机构驱动连接,所述伺服电机与所述plc控制器通讯连接。
21.所述升降机构还包括第一气缸、第二气缸、气缸支撑板,所述气缸支撑板与所述竖向滑轨的下端连接,所述灌装枪的下端依次穿设于所述气缸支撑板、voc抽气装置的中部,所述第一气缸、第二气缸安装在所述气缸支撑板的上方,并分别位于所述灌装枪的两侧,所述第一气缸和第二气缸的伸缩杆穿过所述气缸支撑板与所述voc抽气装置升降驱动连接,所述第一气缸、第二气缸分别与所述plc控制器通讯连接。
22.所述灌装开阀装置还包括流量控制阀、阀门驱动器,所述阀门驱动器通过所述流
量控制阀与所述灌装枪连接,所述进料口通过所述流量控制阀与所述灌装枪连通,所述阀门驱动器与所述plc控制器通讯连接。
23.所述信号传感单元还包括流量传感器,所述流量传感器安装在所述灌装枪的出口处,所述流量传感器与所述plc控制器通讯连接。
24.需要说明的是:前述“第一、第二
…”
不代表具体的数量及顺序,仅仅是用于对名称的区分。
25.在本发明的描述中,需要理解的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是本发明产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
26.前述“横向
”ꢀ
为基于附图所示水平方向,前述“竖向
”ꢀ
为基于附图所示垂直方向。
27.下面对本发明的优点或原理进行说明:1、本发明提供的基于动态校验控制的液态化学品定量自动灌装发方法及系统,通过对设备组成、结构及控制算法等同步改进,重点解决了多种因素引发的误差超差问题,以及采用单一采用定重量或定容量工作模式时,出现传感数据偏移误差无法及时发现和动态调整的问题。本发明可实现动态调整、交互验证、精准灌装、安全灌装,支持定容、定重两种工作模式,并能兼容多种灌装容器和多种化学品的液态化学品自动灌装。
28.2、本发明提供的基于动态校验控制的液态化学品定量自动灌装发方法及系统,支持称重与体积双模定量控制的自动灌装,可以一个模式为主、另外一个模式作为校验;由定容量控制单元感知并计算得到v
i
数据(流量泵 其他传感单元),与称重传感单元数据进行交互校验,动态发现偏差,剔除错误数据,避免系统误报,保障生产线稳定、准确的运行。
29.3、本发明提供的也是一种基于多元测量的液态化学品自动灌装控制方法及系统,通过对控制方法及系统的同步改进,该控制方法是基于对灌装枪与容器容量、流量、质量或相对液位、相对位置的测量,形成多元测量,在灌装过程中通过多元测量与计算,进行自动化灌装控制,灌装前,预先将灌装机构和地磅接地线,能很好的将设备在灌装前、灌装中及灌装后积留的静电导出并消除,从而解决了现有技术中,无法在灌装前、灌装中及灌装后未能将静电及时导出的问题,实现精准、安全灌装,并能兼容多种灌装容器和多种液态化学品自动灌装;4、本发明提供的基于动态校验控制的液态化学品定量自动灌装发方法及系统,其在灌装时,voc抽气装置下降盖住容器口,防止灌装时产生的有毒有害气体污染空气和危害人体健康;灌装结束后,接漏装置伸出,接漏装置接住灌装枪出料口的下方,避免物料残留在灌枪底部滴落到原料桶或者设备上,从而实现数据化、智能化、自动化、快速、安全、精准灌装。
30.5、本发明可以在液面上灌装,喷枪和物料不接触,也可以在液面下灌装、防止产生静电;可以达到2
‰
的动态计量精度,针对特殊精度要求,采用mt高精度称重传感单元,计量精度可达30,000e;6、本发明可以实现完全无人值守,自动化操作;支持多种桶装容器和地磅,灵活自由;可以轻松执行用户定义的稀释动作;允许多种液体灌装作用,满足多工位并行灌装生产
要求;定重量控制程序与定容量控制程序的联动报错程序。
31.7、本发明的升降机构包括伺服电机、竖向滑轨、拖链,灌装机构需上升或下降时,伺服电机通过拖链驱动灌装机构沿着竖向滑轨上升或下降。
32.8、本发明的升降机构还包括第一气缸、第二气缸、气缸支撑板,voc抽气装置需上升或下降时,通过两个气缸驱动,结构简单,控制方便。
33.9、本发明的voc抽气装置包括废气罩、排气管、抽气机构,使用时,用voc抽气装置下降盖住桶口,启动抽气机构,将灌装时产生的有毒有害气体抽离。
34.10、本发明的灌装开阀装置还包括流量控制阀、阀门驱动器,使用时,从进料口往灌装枪内的液态化学品通过阀门驱动器驱动流量控制阀进行开闭。
35.11、本发明的信号传感单元还包括流量传感器,利用流量传感器实时采集灌装枪内液态化学品的流量和流速。
附图说明
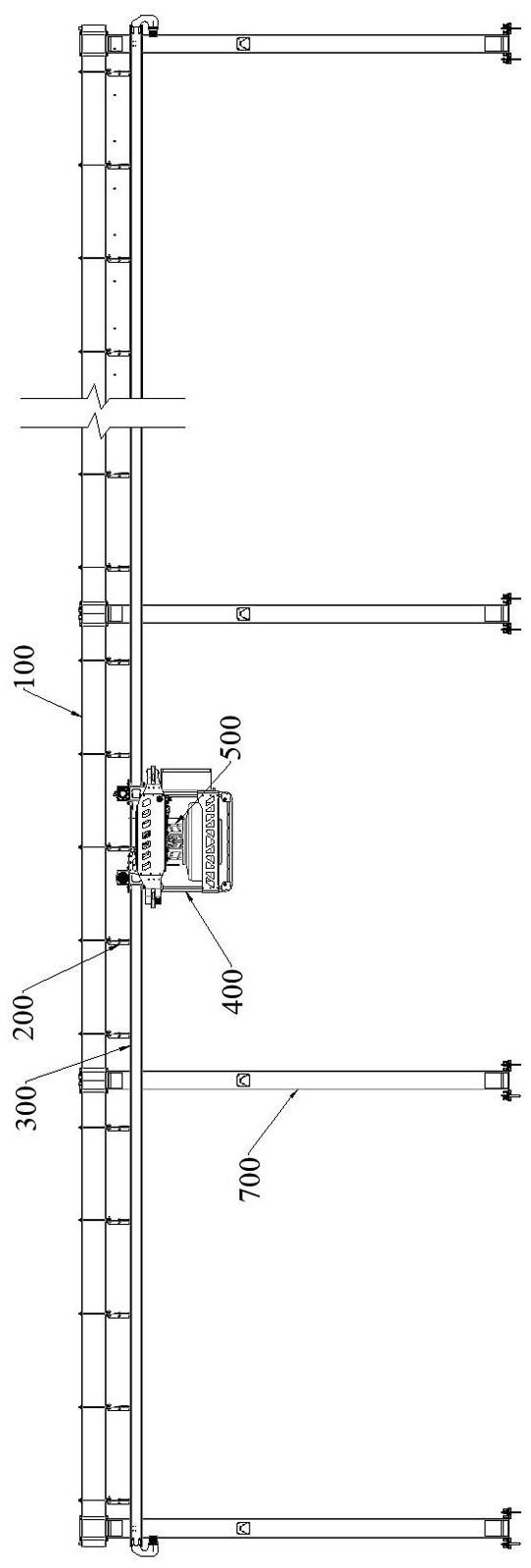
36.图1是本发明实施例液态化学品定量自动灌装系统的网络结构及控制流程示意图;图2是本发明实施例液态化学品定量自动灌装系统灌装工位中的升降机构、灌装机构等部分的立体结构示意图;图3是本发明实施例液态化学品定量自动灌装系统灌装工位中的升降机构、灌装机构等部分的另一视角的立体结构示意图。
37.附图标记说明:10、灌装机构,11、灌装枪,12、灌装开阀装置,121、进料口,122、流量控制阀,123、阀门驱动器,20、升降机构,21、伺服电机,22、竖向滑轨,23、拖链,24、第一气缸,25、第二气缸,26、垂直测距传感器,30、voc抽气装置,31、废气罩,32、排气管,40、接漏装置,51、高位感应开关,52、原点感应开关,53、低点感应开关,60、竖向位置检测机构,61、竖向位置摄像头,62、竖向位置刻度板。
具体实施方式
38.下面对本发明的实施例进行详细说明。
39.实施例1参见图1至图3,本发明提供的基于动态校验控制的液态化学品定量自动灌装方法,其在单工位控制模式下,控制单工位自动灌装,包括如下步骤:s1:设置一与液态化学品供料管线相连通的双模控制的液态化学品定量自动灌装生产线,该生产线包括一个灌装工位,该灌装工位包括设置在支架上的灌装管路、升降机构、灌装机构,及设置在该灌装机构正下方的桶装容器与地磅;所述的升降机构上设置有伺服电机,所述的灌装机构设置在升降机构上,并随其上下左右移动;所述的灌装管路上设有流量控制阀,用于控制管路内的液体流速并感知液体流量;所述的灌装机构上设置有一前端控制器、一灌装枪及桶装容器内液体容量变化传感单元;所述的地磅上设置有桶装容器内液体重量变化传感单元;所述的前端控制器分别与所述的伺服电机、流量控制阀、容量变化传感单元、重量变化传感单元连接;所述的前端控制器内置有式1所示的单工位校验实时
控制程序:式1e—允许误差,0.95≤e≤1.05;vi—桶装容器内液体容量的实时感知值;mi—桶装容器内液体质量实时感知值;s2:启动所述生产线的一个灌装工位,将空的桶装容器与地磅设置在灌装机构正下方,前端控制器控制伺服电机将灌装枪送入桶装容器内的初始灌装位置,采集此时静止状态下的容量变化传感单元、重量变化传感单元的初始数据,并代入到式1中,得到e的初始值;如该e的初始值不在设定的范围内,则对容量变化传感单元、重量变化传感单元的传感器进行自动校准;s3:前端控制器控制流量控制阀开启、开始灌装,由容量变化传感单元传感的数据计算得到进入到桶装容器内的液体体积vi2,由重量变化传感单元传感的数据计算得到进入到桶装容器内的液体重量mi;分别将得到的数据vi与mi代入到式1中,计算其导数的比值得到误差值e,并判断e是否在设定的范围内,如误差值e在设定的范围内,则继续均速灌装,直至vi达到目标灌装容量v0,或者mi达到目标灌装重量mo,则停止灌装、伺服电机将灌装枪移出到桶装容器之外,进行下一桶装容器的灌装;s4:如误差值e超出设定的范围内,则改变灌装流速进行灌装3-5秒钟,对两组传感数据进行交互校验、确定可靠数据,分别出计算实时数据dvi2与dmi的值,取两个数值中一个较小的数据为可靠数据,继续灌装,直至达到目标灌装容量或重量;当前桶装容器灌装完毕后,对出现偏离较大的数值对应的传感单元或流量控制阀,进行校准,重复步骤s2-s4。
40.所述的前端控制器为plc控制器;所述的桶装容器内液体容量变化传感单元,包括设置在灌装枪上、朝向下方的垂直测距传感器26,以及所述升降机构一侧的高位感应开关、原点感应开关、低点感应开关;所述桶装容器内液体重量变化传感单元,包括设置在地磅上的称重传感器。
41.一种前述方法的基于动态校验控制的液态化学品定量自动灌装系统,其包括:一与液态化学品供料管线相连通的双模控制的液态化学品定量自动灌装生产线,该生产线至少包括一个灌装工位,该灌装工位包括设置在支架上的灌装管路、升降机构、灌装机构,及设置在该灌装机构正下方的桶装容器与地磅;所述的升降机构上设置有伺服电机,所述的灌装机构设置在升降机构上,并随其上下左右移动;所述的灌装管路上设有流量控制阀,用于控制管路内的液体流速并感知液体流量;所述的灌装机构上设置有一前端控制器、一灌装枪及桶装容器内液体容量变化传感单元;所述的地磅上设置有桶装容器内液体重量变化传感单元;所述的前端控制器分别与所述的伺服电机、流量控制阀、容量变化传感单元、重量变化传感单元连接;所述的前端控制器内置有单工位校验实时控制程序。
42.所述的生产线具体包括plc控制器、灌装机构、升降机构、机器视觉检测机构、voc抽气装置、接漏装置、地磅及信号传感单元,所述灌装机构、voc抽气装置分别与所述升降机构竖向滑动连接,所述接漏装置与所述升降机构的下端横向滑动连接;所述灌装机构包括灌装枪、设于所述灌装枪上部的灌装开阀装置,所述灌装枪的下端穿设于所述voc抽气装置
的中部,并与其竖向滑动连接,所述灌装开阀装置设有进料口,所述进料口通过所述灌装开阀装置与所述灌装枪连通,所述灌装枪具有灌装嘴,所述信号传感单元包括称重传感器、高位感应开关、原点感应开关、低点感应开关,所述高位感应开关、原点感应开关、低点感应开关、测距传感器26、由上往下依次设在所述升降机构的一侧;所述地磅设在所述灌装机构的正下方,所述称重传感器设在所述地磅上,所述灌装机构、升降机构、机器视觉检测机构、voc抽气装置、接漏装置、地磅、信号传感单元分别与所述plc控制器通讯连接,所述灌装机构、地磅接地线。
43.该系统还包括竖向位置检测机构,所述竖向位置检测机构包括竖向位置摄像头、竖向位置刻度板,所述竖向位置刻度板设在所述升降机构的一侧,所述竖向位置摄像头设在所述灌装机构的上端,并跟随所述灌装机构的升降与所述竖向位置刻度板的刻度水平相朝对,所述高位感应开关、原点感应开关、低点感应开关由上往下依次设在所述竖向位置刻度板上,所述竖向位置摄像头与所述plc控制器通讯连接。
44.其中,升降机构20包括伺服电机21、竖向滑轨22、拖链23、第一气缸24、第二气缸25、距离传感器26,灌装机构10与竖向滑轨22竖向滑动连接,伺服电机21通过拖链23与灌装机构10驱动连接,伺服电机21与plc控制器通讯连接。灌装机构10需上升或下降时,伺服电机21通过拖链23驱动灌装机构10沿着竖向滑轨22上升或下降。
45.气缸支撑板26与竖向滑轨22的下端连接,灌装枪11的下端依次穿设于气缸支撑板26、voc抽气装置30的中部,第一气缸24、第二气缸25安装在气缸支撑板26的上方,并分别位于灌装枪11的两侧,第一气缸24和第二气缸25的伸缩杆穿过气缸支撑板26与voc抽气装置30升降驱动连接,第一气缸24、第二气缸25分别与plc控制器通讯连接。oc抽气装置需上升或下降时,通过两个气缸驱动,结构简单,控制方便。
46.voc抽气装置30包括废气罩31、排气管32、抽气机构,灌装枪11的下端穿设于废气罩31的中部,并与其竖向滑动连接,废气罩31通过排气管32与抽气机构连通,抽气机构与plc控制器通讯连接。使用时,用voc抽气装置30下降盖住桶口,启动抽气机构,将灌装时产生的有毒有害气体抽离。
47.灌装开阀装置12还包括流量控制阀122、阀门驱动器123,阀门驱动器123通过流量控制阀122与灌装枪11连接,进料口121通过流量控制阀122与灌装枪11连通,阀门驱动器123与plc控制器通讯连接。使用时,从进料口121往灌装枪11内的液态化学品通过阀门驱动器123驱动流量控制阀122进行开闭。
48.信号传感单元还包括流量传感器,流量传感器安装在灌装枪11上,流量传感器与plc控制器通讯连接。利用流量传感器实时采集灌装枪11内液态化学品的流量和流速。
49.所述灌装开阀装置还包括流量控制阀、阀门驱动器,所述阀门驱动器通过所述流量控制阀与所述灌装枪连接,所述进料口通过所述流量控制阀与所述灌装枪连通,所述阀门驱动器与所述plc控制器通讯连接。
50.实施例2:本实施例提供的双模控制的液态化学品定量自动灌装方法及系统,是在实施例1的基础上,增加了定重灌装与定容灌装模式下相互校验的步骤。
51.该方法还包括如下步骤:所述的步骤s1中,该前端控制器为plc控制器,其还内置有两种同步运行、相互的
独立工作的数据交互校验程序,并在步骤s3中被执行;所述的步骤s3的灌装过程中,在采用定容灌装模式时,校验方法为:将获取的mi数值代入到式1中,计算得到理论的vi数值,再与实际传感获取的vi数值进行比较,如误差在设定的范围内,则两组传感单元均为正常工作状态;反之,则其中一组为异常状态,进行校准后再继续灌装;所述的步骤s3的灌装过程中,在采用定重灌装模式时,校验方法为:将获取的vi数值代入到式1中,计算得到理论的mi数值,再与实际传感获取的mi数值进行比较,如误差在设定的范围内,则两组传感单元均为正常工作状态;反之,则其中一组为异常状态,进行校准后再继续灌装。
52.实施例3:本实施例提供的双模控制的液态化学品定量自动灌装方法及系统,是在实施例1及2的基础上,增加了另外一组独立传感容量变化的流量控制阀传感数据,与其他传感器获取的数据进行相互校验的步骤。
53.该自动灌装方法,所述的步骤s3、s4,还包括如下步骤:s31:前端控制器控制流量控制阀开启、开始灌装,并且由该流量控制阀的数据计算出进入到桶装容器内的液体体积vi1,同时由容量变化传感单元传感的数据计算得到进入到桶装容器内的液体体积vi2,然后计算得到 vi=vi1 vi2;由重量变化传感单元传感的数据计算得到进入到桶装容器内的液体重量mi;分别将得到的数据vi与mi代入到式1中,计算其导数的比值得到误差值e,并判断e是否在设定的范围内,如误差值e在设定的范围内,则继续均速灌装,直至vi达到目标灌装容量v0,或者mi达到目标灌装重量mo,则停止灌装、伺服电机将灌装枪移出到桶装容器之外,进行下一桶装容器的灌装;s41:如误差值e超出设定的范围内,则改变灌装流速进行灌装3-5秒钟,对三个传感数据进行交互校验、确定可靠数据,分别计算实时数据dvi1、dvi2与dmi的值,以三个数值中两个接近且较小的数据为可靠数据,继续灌装,直至达到目标灌装容量或重量;当前桶装容器灌装完毕后,对出现偏离较大的数值对应的传感单元或流量控制阀,进行校准,重复步骤s2-s4。
54.实施例4:本发明提供的基于动态校验控制的液态化学品定量自动灌装方法,是在实施例1-3的基础上,进一步支持多工位控制模式,实施、同步控制多工位并行自动灌装,包括如下步骤:s12:该生产线包括n 1个灌装工位,n为大于1的自然数,各工位的灌装机构上设有温度传感器;该生产线还包括一远程控制计算机,所述的远程控制计算机分别与各灌装工位的前端控制器连接,并且内置有多工位校验实时控制程序式2:式2式中:δv—灌装枪灌装量的允许容量误差;v
0
—目标灌装容量值;v
i
—桶装容器内液体容量实时感知值;m
i
—桶装容器内液体质量实时感知值;
ρ—灌装液体的平均密度;β—灌装枪的体胀系数,(/℃);t—灌装时液体的温度,℃;s22:同时启动所述生产线的多个灌装工位,分别将各工位上空的桶装容器与地磅设置在灌装机构正下方,各工位的前端控制器控制伺服电机将灌装枪送入桶装容器内的初始灌装位置,采集此时静止状态下的容量变化传感单元、重量变化传感单元的初始数据,并代入到式1中,得到e的初始值,并传输至远程控制计算机内,如有部分工位e的初始值不在设定的范围内,则指令该工位前端控制器,对容量变化传感单元、重量变化传感单元的传感器进行自动校准;s32:所述的远程控制计算机指令各工位的前端控制器,分别根据式1分别控制对应的工位进行灌装,分别控制对应工位的流量控制阀开启、开始灌装,直至vi达到目标灌装容量v0,或者mi达到目标灌装重量mo,则停止灌装、伺服电机将灌装枪移出到桶装容器之外,进行下一桶装容器的灌装;各工位前端控制器将实时获取的数据t、 vi、m
i
,传输给所述的远程控制计算机,由该远程控制计算机自动匹配式2中的参数ρ、β,自动计算并记录本批次各工位灌装结束时的δv数据;s42:以v
0
为中心值,对全部工位灌装结束时的δv数据进行编组和离散度分析,得到该数组的集中趋势的测度值;使用离散系数对多个批次灌装得到的多路、多组数据进行统计分析,根据分析结果排查该生产线及多个灌装工位产生灌装误差的因素,以进行调整。
55.实施前述方法的基于动态校验控制的液态化学品定量自动灌装系统,所述生产线包括n 1个灌装工位,n为大于1的自然数, 各工位的灌装机构上设有温度传感器;该生产线还包括一远程控制计算机,所述的远程控制计算机分别与各灌装工位的前端控制器连接,并且内置有多工位校验实时控制程序。
56.本发明提供的方法及系统,将基于多元测量、多路、多组独立传感的数据进行实时、动态的相互校验,获得多种、多路、多组数据,包括:对灌装枪11与桶装容器之间的垂直距离(相对液位)、容器内的液体容量、液体流量,容器内液体质量的测量,再通过对控制方法及系统的同步改进,是基于获取的多元测量数据,对自动灌装前、中、后的数据进行对比、分析、校验,从而选择可靠(可信度较高)的一组数据用于自动控制,而剔除可信度较低的一组数据,避免由于各种工况的变化、环境条件的变化及传感器自身的变化产生的传感数据失真影响控制系统的控制指令,避免误报、漏报;通过多工位、多路、多组数据的校验、对比和分析,得到引起误差超差的相关因素进行针对性分析,对应的进行改善工况条件、优选传感器,使整个系统不受或者少受环境条件(特别是物料种类和环境温度)变化的影响,使系统的自动灌装精确度稳定、持续、长期的保持在设定的误差范围之内,实现自动化、智能化、数据化、快速、安全、精准控制下的灌装。
57.针对现有技术中称重传感器等传感单元通常用于许多工业任务,其精度同时会受到由传感器自身性能、校准、系统安装正确、零件连接稳定等多种因素的影响,各种工况变化和工作环境条件的变化,也会导致其获取的数据偏移或者失真,因此容易产生错误警报或者漏报,就会导致批次超过正常灌装规格以及灌装质量达不到标准要求,必然会导致企
业名誉及物料损失的问题,本发明提供了多种类、多路、多组独立工作、实时同步采集数据的传感器,在产生误差超差或者其他故障影响生产之前,实时发现、自动调整或者发出报警;灌装控制系统始终感知、控制并且记录整个灌装过程,避免发生误差超差和随之而来的大量返工与处理成本。本发明提供自动灌装控制方法及系统,全程进行了准确的灌装过程多通道数据传感,通过对各组数据的分析、计算,可自动剔除变异数据,因此使控制系统不再受到传感器因环境温度,线性,滞后和蠕变等变化带来的不利影响,使系统可以长期、可靠、稳定、精准的实施自动灌装控制,而无需人工频繁的对其校准,节省了大量时间和人工,提高了设备利用率。
58.本发明可应用于多种有毒、易挥发性液体的全自动液体定量灌装(桶装),其控制部分设计包括前端的单工位plc控制,包括空桶的输送、桶口的定位、液体定量灌装、满桶的输送等工作;对于多工位的生产线,则由远程控制计算机进行协同控制,同步监控、记录整个生产线的全部工位的灌装作业和过程数据,为进一步分析误差因素并改进,提供数据基础。
59.本发明提供的方法及系统,通过定容、定重两种工作模式均可实现精确的定量灌装,两种工作模式可以根据需要自由切换。在整个液体的定量灌装过程中,不需要人工接触灌装液体,设备能够实现全自动的受控作业。
60.本发明使用的单桶灌装的容量为100-500l,容许的误差可控制在0.1%的范围内。本发明提供的自动化控制流程提高了灌装的准确性,通用性和可靠性。
61.本发明可以分别设定定容、定重两种工作模式下不同的允许误差值,并进行控制。即以其中一种模式获取的数据为主、另外一种控制模式作为校验。例如:当同步运行的主控模式传感得到的已灌装到容器中的液态化学品数据,与校验模式传感得到的数据之间联动分析后的误差值,超出设定的区间范围时,则在设定的时长内自动降低或增加灌装速度到,对两种模式传感得到的已灌装到容器中的液态化学品数据进行动态校验、纠错和校准,具体包括:(1)如在设定的时长内经过动态校验、纠错和校准后,两种模式传感得到的数据之间联动分析后的允许误差值,回到设定的区间范围时,恢复正常速度灌装;(2):如在设定的时长内经过动态校验、纠错和校准后,两种模式传感得到的数据之间联动分析后的允许误差值,不能回到设定的区间范围时,重复步骤s21,直至允许误差值,回到设定的区间范围时,恢复正常速度灌装;(3):如连续执行步骤使(2)到设定的次数,仍不能使该允许误差值回到设定的区间范围时,则停止灌装、停顿3秒使传感的静态数据后,控制系统重新计算两种模式传感得到的静态数据之间联动分析后的允许误差值,如能够回到设定的区间范围时,则重复步骤(1)、恢复灌装,反之则停止灌装、发出报警信息,等待人工排除故障后,再重复步骤s21、恢复灌装。
62.本发明提供的方法,可以通过电动泵控制灌装时液态化学品流速及流量的方法,该方法通过控制电动泵的频率来调整供料管线中液态化学品的流速,使液态化学品的灌注速度小于或等于最大加注速度,方便控制。
63.本发明提供的自动灌装控制方法及系统,可支持不同的生产现场解决方案,支持粗细两种放料模式,支持灌装枪的自动升降。单工位的前端控制器,根据需要,也可以直接
集成触摸显示、生产管理、传感器采集处理、产品到位检测、报警输出等功能,使单个工位即可独立作业。同时,还可以进一步通过远程控制计算机进行集中控制,同步控制多个工位实施连续的灌装作业,并且通过对多个工位、多路传感数据的多元化分析,进行更为精准的灌装控制。
64.本发明提供的方法及系统,还具有安全高效,防爆合规;废气集中收集,保护工作环境;多重联锁控制、相互动态校验,安全放心操作等优点。
65.以上仅为本发明的具体实施例,并不以此限定本发明的保护范围;在不违反本发明构思的基础上所作的任何替换与改进,均属本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。