1.本发明涉及医疗器械技术领域,特别涉及一种下肢力线的测量系统及测量方法。
背景技术:
2.目前下肢力线测量实现的主要方式是使用加速度计和陀螺仪采集必要数据,进行轨迹拟合,根据拟合的曲线进行运算,从而得到下肢力线。由于在轨迹拟合的过程中,传感器的误差会对计算结果产生较大的影响,因此不适用于低成本的传感器。
3.在专利申请文件cn110974493a中记载,测量股骨倾角时,以导航单元中的运动传感器的三个轴建立参考坐标系,并拟合运动传感器的空间运动轨迹,计算得出股骨髋臼窝的坐标值,并根据髋臼窝的坐标值计算得出股骨的内外翻角和前后倾角。
4.现有方案采用轨迹拟合的方式进行股骨倾角测量,由于传感器在轨迹拟合算法中需要经过两次积分运算,误差会容易累积导致计算出的结果误差较大,并且由于对传感器的参数非常敏感,导致低成本的传感器不能在这种情况下使用。
技术实现要素:
5.本发明的目的在于提供一种下肢力线的测量系统及测量方法,可以使用低成本的加速度计完成对下肢力线的测量,只需要进行一次积分运算,降低了计算的累积误差。
6.为解决上述技术问题,本发明提供一种下肢力线的测量系统,包括:股骨固定装置以及测量模块,其中,
7.所述股骨固定装置固定于股骨远端;
8.所述测量模块固定于所述股骨固定装置上,用于测量所述股骨远端做内外翻运动与做前后运动时的加速度,通过一次积分运算得到速度,并根据以下公式计算得到所述股骨远端的内外翻角β与前后倾角α,
[0009][0010]
其中,v
x
、vy和vz为所述股骨远端在x、y与z方向的速度分量,x、y与z方向相互垂直。
[0011]
可选的,所述下肢力线的测量系统还包括:终端,所述终端用于显示所述内外翻角与所述前后倾角。
[0012]
可选的,所述股骨固定装置包括:装置主体、辅助对准箭头、股骨固定针、装置固定孔以及测量模块固定凹槽;其中,
[0013]
所述辅助对准箭头用于与所述股骨上的预定标记对齐;
[0014]
所述股骨固定针沿着垂直于所述股骨的方向从所述股骨远端插入;
[0015]
所述装置固定孔用于旋入螺钉以将所述股骨固定装置与所述股骨远端固定;
[0016]
所述测量模块固定凹槽用于固定所述测量模块。
[0017]
可选的,所述测量模块的外部包括模块主体、测量模块固定定位点、操作按键以及用户指示装置;其中,
[0018]
所述测量模块固定定位点用于在所述测量模块与所述股骨固定装置固定时起到定位及固定的作用;
[0019]
所述操作按键用于开或关所述测量模块;
[0020]
所述用户指示装置用于指示所述测量模块的数据采集进度。
[0021]
可选的,所述测量模块的内部包括:惯性传感器、内部按键、微处理器、无线传输模块、内部指示灯以及电池;其中,
[0022]
所述惯性传感器用于测量所述股骨远端在做内外翻运动与做前后运动时的加速度并传输至所述微处理器;
[0023]
所述内部按键用于与所述操作按键连接并将开关指令传输至所述微处理器;
[0024]
所述微处理器用于对加速度数据进行一次积分运算得到速度数据,并对速度数据进行处理得到所述股骨远端的内外翻角与前后倾角;
[0025]
所述无线传输模块用于所述微处理器与所述终端之间的数据传输;
[0026]
所述内部指示灯用于接收所述微处理器的指示并传输至所述用户指示装置;
[0027]
所述电池用于向所述微处理器供电。
[0028]
可选的,所述惯性传感器还用于测量所述股骨远端在做内外翻运动与做前后运动时的角速度并传输至所述微处理器,以对加速度或速度进行修正。
[0029]
可选的,所述股骨远端做内外翻运动时,所述惯性传感器测量所述股骨在x、y与z方向的加速度分量,所述微处理器进行一次积分运算得到速度分量v
x
、vy和vz,将vz=0且v
x
和vy不为0的数据作为有效数据;所述微处理器根据公式计算得到所述股骨远端的多个内外翻角β;所述微处理器对计算结果进行均值滤波,得到实际的内外翻角β。
[0030]
可选的,所述股骨远端做前后运动时,所述惯性传感器测量所述股骨在x、y与z方向的加速度分量,所述微处理器进行一次积分运算得到速度分量v
x
、vy和vz,将v
x
=0且vy和vz为0的数据作为有效数据;所述微处理器根据公式计算得到所述股骨远端的多个前后倾角α;所述微处理器对计算结果进行均值滤波,得到实际的前后倾角α。。
[0031]
可选的,所述惯性传感器测量一段时间内的有效数据,当所述股骨远端单次运动的有效数据量大于5%时,所述用户指示装置发出采集成功的指示。
[0032]
相应的,本发明还提供一种下肢力线的测量方法,采用如上所述的下肢力线的测量系统进行测量,所述测量方法包括以下步骤:
[0033]
将股骨固定装置固定于股骨远端;
[0034]
将测量模块固定于所述股骨固定装置上;
[0035]
让所述股骨远端做内外翻运动,惯性传感器测量所述股骨远端在x、y与z方向的加速度分量,所述微处理器进行一次积分运算得到速度分量v
x
、vy和vz,将vz=0且v
x
和vy不为0的数据作为有效数据,采集一段时间的有效数据之后,所述微处理器根据有效数据计算所述股骨远端的内外翻角β;
[0036]
让所述股骨远端做前后运动,所述惯性传感器测量所述股骨远端在x、y与z方向的加速度分量,所述微处理器进行一次积分运算得到速度分量v
x
、vy和vz,将v
x
=0且vy和vz不为0的数据作为有效数据,采集一段时间的有效数据之后,所述微处理器根据有效数据计算所述股骨远端的前后倾角α。
[0037]
可选的,将股骨固定装置固定于股骨远端的方法包括:
通常是以包括“和/或”的含义而进行使用的,术语“若干”通常是以包括“至少一个”的含义而进行使用的,术语“至少两个”通常是以包括“两个或两个以上”的含义而进行使用的,此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括一个或者至少两个该特征,除非内容另外明确指出外。
[0058]
图1是本发明一实施例提供的y轴朝向球心的模块运动示意图,图2是本发明一实施例提供的y轴与固定杆在垂直方向上成一定夹角的模块运动示意图,图3是本发明一实施例提供的y轴与固定杆在水平方向上成一定夹角的模块运动示意图。在图1至图3中,v
x
、vy、vz分别为x轴、y轴、z轴的速度分量,图中标记的x 、y 、z 分别为x轴、y轴、z轴的坐标正向,与之相反的方向定义为x-,y-,z-。
[0059]
请参考图1所示,一个正方形的模块通过固定杆固定,固定杆一边固定在球心,一边固定在模块上,模块可以通过固定杆绕球心运动,图1中固定杆与y 重合,此时y 朝向圆心,所以模块在运动时,所有方向的速度分量均与y轴垂直,当速度分量与x轴和y轴同时垂直时,此时所有的速度分量都在z轴,当速度分量与z轴和y轴同时垂直时,所有的速度分量都在x轴。
[0060]
如图2所示,将模块按照x轴进行旋转,那么y轴将会与固定杆成夹角α,之后让模块绕球心运动,当检测到v
x
的速度分量为0,但是vy和vz速度分量不为0,计算公式如下:
[0061][0062]
如图3所示,将模块按照z轴进行旋转,那么y轴将会与固定杆成夹角β,之后让模块绕球心运动,当检测到vz的速度分量为0,但是v
x
和vy速度分量不为0,计算公式如下:
[0063][0064]
由以上状态可知,在绕球面进行运动时,由于速度的方向始终与球面相切,进行接近于垂直方向或水平方向的运动,当观测到一个轴的速度分量为0时,现有的速度分量全部由另外两个轴产生,可以通过速度分量的大小比例,计算出夹角。
[0065]
加速度计采集的为加速度数据,通过一次积分可以得到速度数据,通过两次积分可以得到位移数据,陀螺仪通过采集偏转角进行实时的修正。
[0066]
采用上述的原理,本发明提供一种下肢力线的测量系统,包括:股骨固定装置以及测量模块,其中,所述股骨固定装置固定于股骨远端,所述测量模块固定于所述股骨固定装置上,用于测量所述股骨远端做内外翻运动与做前后运动时的加速度,通过一次积分运算得到速度,并根据以下公式计算得到所述股骨远端的内外翻角β与前后倾角α,
[0067][0068]
其中,v
x
、vy和vz为所述股骨远端在x、y与z方向的速度,x、y与z方向相互垂直。
[0069]
所述下肢力线的测量系统还包括终端,所述终端用于显示所述内外翻角与所述前后倾角。
[0070]
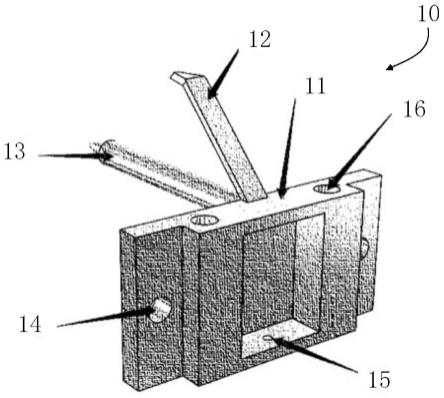
图4是本发明一实施例提供的股骨固定装置的结构示意图。请参考图4所示,所述股骨固定装置10包括:装置主体11、辅助对准箭头12、股骨固定针13、装置固定孔14以及测
量模块固定凹槽15。其中,所述辅助对准箭头12用于与所述股骨上的预定标记对齐,所述辅助对准箭头优选为whiteside线(股骨前后轴)辅助对准箭头,所述预定标记为whiteside线,所述股骨固定装置10上设置有所述whiteside线辅助对准箭头,所述股骨上存在有whiteside线,将所述whiteside线辅助对准箭头与所述whiteside线对齐,所述对齐包含对准箭头与线之间的对准或交叠,以实现所述股骨固定装置10与所述股骨的对位。所述股骨固定针13沿着垂直于所述股骨的方法从所述股骨远端插入;所述装置固定孔14用于旋入螺钉以将所述股骨固定装置10与所述股骨远端固定;所述测量模块固定凹槽15用于固定所述测量模块20。根据所述whiteside线辅助对准箭头实现所述股骨固定装置10与所述股骨的对位,所述对位是指将所述股骨固定装置10与所述股骨进行位置匹配,将所述股骨固定装置10放置于所述股骨上预定放置所述股骨固定装置10的位置上,所述股骨固定针13与所述装置固定孔14实现所述股骨固定装置10与所述股骨的固定。
[0071]
本实施例中,所述股骨固定装置10还包括:截骨板定位孔16,所述截骨板定位孔16后续用于固定截骨板,根据内外翻角和前后倾角的度数固定截骨板完成截骨。
[0072]
图5是本发明一实施例提供的测量模块的外部结构示意图。请参考图5所示,所述测量模块20的外部包括模块主体21、测量模块固定定位点22、操作按键23以及用户指示装置24。其中,所述测量模块固定定位点22用于在所述测量模块20与所述股骨固定装置10固定时起到定位及固定作用,本实施中,所述测量模块固定定位点22采用弹簧式圆球设计。所述操作按键23用于开或关所述测量模块20,即通过所述操作按键23打开或关闭所述测量模块20。所述用户指示装置24用于指示所述测量模块20的数据采集进度,若采集到的有效数据量大于5%时,所述用户指示装置发出采集成功的指示。示例性的,所述用户指示装置24包含红灯与绿灯,若采集到的有效数据量大于5%时显示绿灯,否则显示红灯。
[0073]
图6是本发明一实施例提供的测量模块的内部结构框图。请参考图5与图6所示,所述测量模块20的内部包括:惯性传感器201、内部按键202、微处理器203、无线传输模块204、内部指示灯205以及电池206。其中,所述惯性传感器201用于测量所述股骨远端在做内外翻运动与做前后运动时的加速度并传输至所述微处理器203,所述内部按键202用于与所述操作按键23连接并将开关指令传输至所述微处理器203。所述微处理器203用于对加速度数据进行一次积分运算得到速度数据,并对速度数据进行处理得到所述股骨远端的内外翻角与前后倾角。所述无线传输模块204用于所述微处理器203与所述终端之间的数据传输。所述内部指示灯205用于接收所述微处理器203的指示并传输至所述用户指示装置24。所述电池206用于向所述微处理器203供电。
[0074]
本实施例中,由于需要测量股骨运动时的加速度,且仅进行一次积分运算,因此可以使用低成本的加速度计完成测量,即所述惯性传感器201可以为加速度计。
[0075]
本实施例中,所述惯性传感器还用于测量所述股骨远端在做内外翻运动与做前后运动时的角速度并传输至所述微处理器,以对加速度或速度进行修正。可以采用低成本的陀螺仪进行角速度的测量。即股骨远端运动时不可避免的会产生角度偏移,陀螺仪能够实施对角度变化进行修正。
[0076]
本实施例所提供的下肢力线的测量系统可以使用低成本的加速度计和陀螺仪完成对下肢力线的测量,只需要进行一次积分运算,从而降低了计算的累积误差。
[0077]
所述股骨远端做内外翻运动时,所述惯性传感器201测量所述股骨远端在x、y与z
方向的加速度分量,所述微处理器203进行一次积分运算得到速度分量v
x
、vy和vz,其中,x、y与z方向相互垂直,将vz=0且v
x
和vy不为0的数据作为有效数据;所述微处理器根据公式(2)计算得到所述股骨远端的多个内外翻角β,所述微处理器对计算结果进行均值滤波,得到实际的内外翻角β。
[0078]
所述股骨远端做前后运动时,所述惯性传感器201测量所述股骨远端在x、y与z方向的加速度分量,所述微处理器203进行一次积分运算得到速度分量v
x
、vy和vz,其中,x、y与z方向相互垂直,将v
x
=0且vy和vz不为0的数据作为有效数据;所述微处理器根据公式(1)计算得到所述股骨远端的多个前后倾角α,所述微处理器对计算结果进行均值滤波,得到实际的前后倾角α。
[0079]
所述惯性传感器201测量一段时间内的有效数据,例如每秒钟进行200次的数据采集,当所述股骨远端单次运动的有效数据量大于5%时,所述用户指示装置24显示绿灯,否则显示红灯。当显示至少3次绿灯时,则停止测量,当然,也可以是4次、5次或更多次,本发明对此不作限定。
[0080]
本发明提供的下肢力线的测量系统中,所述股骨固定装置10固定于股骨远端;所述测量模块20固定于所述股骨固定装置10上,用于测量所述股骨远端做内外翻运动与做前后运动时的加速度,通过一次积分运算得到速度,并根据公式计算得到所述股骨远端的内外翻角与前后倾角。本发明由于仅需要进行一次积分运算,从而降低了计算的累积误差。
[0081]
相应的,本发明还提供一种下肢力线的测量方法,采用如上所述的下肢力线的测量系统,所述下肢力线的测量方法包括以下步骤:
[0082]
将股骨固定装置固定于股骨远端;
[0083]
将测量模块固定于所述股骨固定装置上;
[0084]
让所述股骨远端做内外翻运动,惯性传感器测量所述股骨在x、y与z方向的加速度分量,所述微处理器进行一次积分运算得到速度分量v
x
、vy和vz,将vz=0且v
x
和vy不为0的数据作为有效数据,采集一段时间的有效数据之后,所述微处理器根据有效数据计算内外翻角β;
[0085]
让所述股骨远端做前后运动,所述惯性传感器测量所述股骨在x、y与z方向的加速度分量,所述微处理器进行一次积分运算得到速度分量v
x
、vy和vz,将v
x
=0且vy和vz不为0的数据作为有效数据,采集一段时间的有效数据之后,所述微处理器根据有效数据计算前后倾角α。
[0086]
之后所述下肢力线的测量方法还包括:所述无线传输模块将计算结果传输至终端,所述终端显示所述内外翻角与所述前后倾角。
[0087]
首先,请参考图4所示,将所述股骨固定装置10固定于股骨远端。具体的,将辅助对准箭头12与股骨上的预定标记对齐;将股骨固定针13插入所述股骨远端;将螺丝旋入装置固定孔14以将所述股骨固定装置10与股骨远端固定。
[0088]
接着,请参考图4与图5所示,将测量模块20固定于所述股骨固定装置10上。具体的,将测量模块20固定于测量模块固定凹槽15。固定之后的位置关系可以参考图7至图9所示。
[0089]
接着,请参考图4至图10所示,单击操作按键23,开始测量,让所述股骨远端做内外翻运动(参考图10中的运动方向1),运动过程中尽量避免内外旋运动,采用惯性传感器201
测量所述股骨在x、y与z方向的加速度分量,所述微处理器203进行一次积分运算得到速度分量v
x
、vy和vz,将vz=0且v
x
和vy不为0的数据作为有效数据,采集一段时间的有效数据之后,所述微处理器203根据有效数据与公式(2)计算内外翻角β。其中,所述微处理器203根据有效数据与公式(2)计算得到多个内外翻角β,然后对计算结果进行均值滤波,得到实际的内外翻角θ。
[0090]
请对比图10与图1至图3,其中,股骨指的是图10中的大腿骨,靠近盆骨的位置为近端,靠近膝盖的位置为远端,所述股骨固定装置10固定于所述股骨远端,其中所述测量模块20相当于图1至图3中的模块,大腿骨相当于图1至图3中的固定杆,大腿骨近端相当于图1至图3中的球心。根据图1至图3的原理分析,根据如下公式(2)能够计算出内外翻角β。根据如下公式(1)能够计算出前后倾角α。
[0091][0092][0093]
接着,请参考图4至图10所示,让所述股骨远端做前后运动(参考图10中的运动方向2),运动过程尽量避免内外旋运动,所述惯性传感器201测量所述股骨在x、y与z方向的加速度分量,所述微处理器203进行一次积分运算得到速度分量v
x
、vy和vz,将v
x
=0且vy和vz不为0的数据作为有效数据,采集一段时间的有效数据之后,所述微处理器203根据有效数据与公式(1)计算前后倾角α。其中,所述微处理器203根据有效数据与公式(1)计算得到多个前后倾角α,然后对计算结果进行均值滤波,得到实际的前后倾角α。
[0094]
运动过程中所述测量模块20每秒钟进行200次的数据采集,当单次移动的有效数据量大于5%时,所述用户指示装置24显示绿灯,否则显示红灯,当显示至少3次(优选为5次)绿灯时,则可以停止测量。
[0095]
最后,所述无线传输模块204将计算结果传输至终端,所述终端显示计算结果,分别显示出内外翻角和前后倾角的度数,根据度数固定截骨板完成截骨。
[0096]
本发明提供的下肢力线的测量方法方法中,将所述股骨固定装置10固定于所述股骨远端;将所述测量模块20固定于所述股骨固定装置10上;让所述股骨远端分别做内外翻运动与前后运动,所述惯性传感器201测量所述股骨远端在x、y与z方向的加速度分量,所述微处理器203进行一次积分运算得到速度分量,并根据公式计算得到内外翻角θ与前后倾角α。本发明由于仅需要进行一次积分运算,从而降低了计算的累积误差。
[0097]
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
