1.本发明涉及喷洒单元和具有这种喷洒单元的运载工具。
背景技术:
2.本发明的总体背景是施用农药至作物。喷洒液体必须雾化。这通常使用液压喷嘴来完成。更复杂的方法是使用旋转盘状物。当喷洒农药的运载工具是无人机或无人驾驶飞行器(uav)时,需要仔细考虑专用喷洒技术,因为它会增加重量并且有能量要求。因此,旋转盘状物有潜力成为无人机应用的有效雾化系统。这是因为它们对于产生液滴的能量要求一般较低,并且其他部件与电池供电的无人机兼容。
3.然而,旋转盘状物具有喷雾片在盘状物的平面内水平出现的特征,并且喷雾片需要一种将其朝向目标作物引导的方法。这可以通过向侧面倾斜盘状物并添加一个防护罩来阻挡不需要的方向上的喷洒来实现。然而,这具有设计制造一种用于收集和回收被阻挡的喷洒的装置的复杂性(参见micron herbiflex 4;http://www.microngroup.com/agriculture/herbiflex-4)。此外,来自旋转盘状物的输出显着降低,需要额外的雾化单元来补偿。
4.在无人驾驶飞行器(uav)中,这可以通过将旋转盘状物放置在转子下方来实现,以使得所谓的下洗效应(转子产生的风)将喷雾片向下朝向目标作物引导。用于喷雾片的方向的类似空气辅助可以应用于陆基运载工具,例如拖拉机和无人驾驶地面车辆(ugv),装配有喷杆或单独的雾化单元。然而,旋转盘状物和转子或类似空气辅助装置的组合会产生锥形喷洒模式,这会导致当施药运载工具行进穿过目标田地时,目标作物上的沉积不均匀。沉积在边缘处较高而在中心处较低,导致m形沉积。沉积应该横跨喷幅上是均匀的,并且需要一种旋转盘状物雾化设备,该旋转盘状物雾化设备无论在喷洒器上放置多少喷洒单元都可以产生横跨工作宽度上具有均匀沉积的定向喷雾片。
技术实现要素:
5.具有改进的用于液体(例如那些含有化学和/或生物学的农业活性成分的液体)的喷洒的装置将是有利的。
6.通过独立权利要求的主题解决了本发明的目的,其中将其他实施方案并入从属权利要求中。应注意,以下所描述的本发明的方面和实施例还适用于喷洒单元、具有一个或多个喷洒单元的运载工具。
7.在第一方面,提供了一种喷洒单元。所述喷洒单元包括轴、盘状物、液体注施机以及喷洒方向组件。所述盘状物被配置为围绕以所述盘状物的中心为中心的所述轴旋转。所述液体注施机被配置为将液体施用到所述盘状物的表面。所述喷洒方向组件部分地围绕所述盘状物。所述喷洒方向组件的内表面被配置为修改离开所述盘状物的外边缘的所有液体的轨迹。
8.换句话说,带有包含具有特定形状的固定罩的旋转盘状物的喷洒单元将喷雾片引
导成扇形而不是空心锥形。固定罩以如下配置围绕旋转盘状物:允许固定罩捕获来自旋转盘状物的雾化液滴并在期望方向上引导来自旋转盘状物的雾化液滴。
9.以这种方式,可以提供每单位面积土地的每株植物的活性成分的正确施用。
10.在一个实施例中,喷洒方向组件具有半球形形状,所述半球形形状具有相对的悬垂侧壁以及在顶部区域的孔和在底部区域的孔。
11.在一个实施例中,轴竖直地延伸通过喷洒方向组件的顶部区域处的孔的中心位置。
12.以这种方式,喷洒方向组件可以相对于喷洒轴和旋转盘状物最优地定位,以使其对离开盘状物的外边缘的所有液体的轨迹的影响最大化。
13.在一个实施例中,喷洒方向组件的底部区域处的孔的直径大于在喷洒方向组件的顶部区域处的孔的直径。
14.在一个实施例中,盘状物的边缘靠近喷洒方向组件的内表面并且靠近喷洒方向组件的顶部区域定位。
15.这样,喷洒方向组件会直接影响离开盘状物的所有液体的轨迹,而没有可能发生任何不利影响,例如关于液滴尺寸结构或分布等。
16.在一个实施例中,盘状物的边缘和喷洒方向组件的内表面之间的最短距离在100微米和1毫米之间。
17.在一个实施例中,在喷洒方向组件的底部区域处的孔附近的喷洒方向组件的内表面布置成相对于盘状物的表面的平面成角度,液体通过喷洒方向组件的底部区域处的孔离开喷洒方向组件。
18.这样,可以在水平位置中运行旋转盘状物,并最优地利用离心力的影响来雾化液体。然而,通过喷洒方向组件,雾化液体可以被引导朝向需要喷洒的目标区域和/或作物,该目标区域和/或作物通常相对于旋转盘状物的水平位置成角度地设置。
19.在一个实施例中,喷洒方向组件的内表面包括多个壁,其中多个壁的方向在相对于盘状物的横向侧面基本垂直的平面中延伸,并且其中多个壁的一个或多个平面相对于盘状物的表面的平面基本垂直。
20.以这种方式,通道或凹槽被创建作为喷洒方向组件的一部分,其有助于喷雾液滴的目标分布。
21.在一个实施例中,多个壁径向地围绕盘状物定位并且优选地围绕盘状物以相等的距离定位。
22.在一个实施例中,喷洒方向组件在顶部区域处具有圆形孔并且在底部区域处具有椭圆形孔。
23.换言之,在喷洒方向组件的底部区域处的椭圆形孔有助于实现扁平扇形喷洒模式。
24.在一个实施例中,喷洒方向组件的内表面具有低摩擦表面。
25.这样,由旋转盘状物形成的各个液滴在喷洒方向组件的内表面上滚动并且不会显着粘附。
26.在一个实施例中,盘状物的直径相对于喷洒方向组件的底部区域处的孔径的最大直径之间比率在1:2和1:20之间。
27.在一个实施例中,喷洒方向组件是双壁的,并且喷洒方向组件的两个壁之间的空间被配置为朝向喷洒方向引导空气。
28.换言之,固定罩内的气幕有助于将喷雾片运输到目标区域和/或作物并渗透到叶冠中。这特别地适用于低喷雾量(例如,《50l/ha),在低喷雾量的情况下喷雾液滴和云的较低动量会减少液滴到作物冠层中的渗透。气幕还可用于缓解风引起的潜在漂移问题。
29.在第二方面,提供了一种喷雾运载工具,包括至少一个根据第一方面的喷洒单元。
30.在一个实施例中,喷雾运载工具包括液箱、具有被配置为朝向喷洒方向引导空气的喷洒方向组件的喷洒单元、至少一个致动器、多个传感器和处理单元。液箱被配置为保持液体。至少一个喷洒单元被配置为喷洒液体。至少一个致动器被配置为控制通过喷洒方向组件的空间朝向喷洒方向的空气流量。多个传感器中的至少一个传感器被配置为测量喷雾运载工具相对于地面的速度。多个传感器中的至少一个传感器被配置为测量关于喷雾运载工具的前-后轴线相对于喷雾运载工具的空气运动方向。多个传感器中的至少一个传感器被配置为测量相对于喷雾运载工具的空气运动速度。处理单元被配置为确定相对于前-后轴线在地面上的投影的空气运动方向并确定相对于地面的空气运动速度,该确定包括利用喷雾运载工具的速度、关于喷雾运载工具的前-后轴线相对于喷雾运载工具的空气运动方向以及相对于喷雾运载工具的空气运动速度。处理单元被配置为控制至少一个致动器,其中用于控制至少一个致动器的至少一个指令的确定包括利用所确定的相对于前-后轴线在地面上的投影的空气运动方向,以及所确定的相对于地面的空气运动速度。
31.换言之,气幕被设计成成使得空气流量被调节为应对待喷洒区域上不断变化的风况,例如为了减轻潜在的漂移。
32.有利地,任何上述方面提供的益处同样适用于所有其他方面,反之亦然。
33.参照下文描述的实施方案,上述方面和实施例将变得显而易见并被阐明。
附图说明
34.下面将参考以下附图描述示例性实施方案:
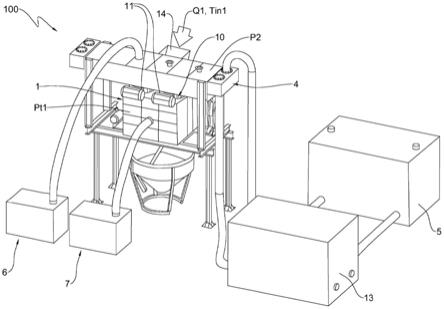
35.图1从侧视图的角度示出了新开发的喷洒单元的实施例的示意性设置;
36.图2从另一侧视图的角度示出了根据图1的喷洒单元的实施例;
37.图3从侧视图的角度示出了根据图1的喷洒单元的实施例,其中多个壁位于喷洒方向组件的内侧上;
38.图4从底侧视图的角度示出了根据图3的喷洒单元的实施例,其中多个壁位于喷洒方向组件的内侧上;
39.图5从底侧视图的角度示出了根据图1的喷洒单元的实施例;
40.图6示出了根据图1的喷洒单元的实施例,其中空气通道位于喷洒方向组件中;
41.图7示出了根据图1的具有锥形盘状物的喷洒单元的实施例;
42.图8示出了具有喷洒单元的喷雾运载工具的示意性实施例;
43.图9示出了具有不同喷洒单元及其相应喷幅的喷雾运载工具的示意性实施例;
44.图10示出了具有喷洒单元的喷雾运载工具的示意性实施例,以及对通过喷洒方向组件的空气流量的控制;
45.图11a和图11b分别示出了具有喷洒单元的喷雾运载工具的示意性实施例,以及根
据不同风况对通过喷洒方向组件的空气流量的控制。
具体实施方式
46.图1从侧视图的角度示出了喷洒单元10的实施例。喷洒单元包括轴20、盘状物30、液体注施机40和喷洒方向组件50。盘状物被配置为围绕以盘状物的中心为中心的轴旋转。液体注施机被配置为将液体施用到盘状物的表面。喷洒方向组件部分地围绕盘状物。喷洒方向组件的内表面51被配置为修改离开盘状物的外边缘的所有液体的轨迹。
47.以这种方式,喷洒单元的喷洒方向组件确实将喷雾片引导成扇形而不是空心锥形。固定罩以如下配置围绕旋转盘状物:允许固定罩捕获来自旋转盘状物的雾化液滴并在期望方向上引导来自旋转盘状物的雾化液滴。结果,可以更容易地提供每单位面积土地的每株植物的活性成分的正确施用。
48.在一个实施例中,术语“盘状物”指的是扁平盘状物,但也包括锥形盘状物。
49.在一个实施例中,盘状物包括设置在盘状物的外围中的齿或锯齿。
50.在一个实施例中,术语“部分地围绕”表示喷洒方向组件具有以下这样的设计和形状:使得至少离开盘状物的外边缘的所有液体在它们的轨迹上都被修改。然而,由于喷洒方向组件具有孔,因此它仅部分地围绕盘状物。
51.在一个实施例中,喷洒方向组件不围绕以盘状物的中心为中心的轴旋转。换言之,喷洒组件相对于被配置为围绕以盘状物的中心为中心的轴旋转的盘状物处于固定位置。
52.在一个实施例中,液体注施机包括至少一个进料管。进料管被配置为将液体从液箱传送到盘状物并将液体施加到盘状物上。
53.在一个实施例中,液体注施机包括至少一个液箱和至少一个进料管。
54.在一个实施例中,喷洒方向组件具有外表面(54)。
55.在一个实施例中,术语“液体”是指包括化学和/或生物基农业活性成分的液体,例如除草剂、杀虫剂、杀菌剂、作物营养剂、生物刺激剂、植物生长调节剂等。
56.在一个实施例中,靠近轴的箭头表示轴和盘状物的潜在旋转方向。该旋转也可以是顺时针的。
57.在一个实施例中,盘状物的平面表面上方的箭头表示离心力和液体雾化的方向。
58.根据一个实施例,喷洒方向组件具有半球形形状,所述半球形形状具有相对的悬垂侧壁以及在顶部区域处的孔52和在底部区域处的孔53。
59.术语“半球形”旨在包括除了真正的球形以外的形状,举例来说包括半球形或半椭圆形,诸如半扁长或半扁圆形状。例如,该形状可以包括多个表面,这些表面的圆角程度不同。在这样的实施方案中,在两个或更多个这样的表面交汇的地方可能存在小的不连续性。
60.在一个实施例中,喷洒方向组件具有半球形形状。
61.在一个实施例中,术语“顶部区域”和“底部区域”是指相对于地面的地理位置,其中“底部区域”与“顶部区域”相比更接近地面。
62.根据一个实施例,轴竖直地延伸通过喷洒方向组件的顶部区域处的孔的中心位置。
63.在一个实施例中,液体注施机的进料管延伸通过喷洒方向组件的顶部区域处的孔。
64.根据一个实施例,喷洒方向组件的底部区域处的孔的直径大于在喷洒方向组件的顶部区域处的孔的直径。
65.在一个实施例中,底部区域处的孔具有圆形或椭圆形横截面。离开底部区域处的孔朝向目标作物和/或区域的雾化液体的喷幅具有与底部区域处的孔相同或相似的横截面(因此也是圆形或椭圆形)。
66.根据一个实施例,盘状物的边缘靠近喷洒方向组件的内表面并且靠近喷洒方向组件的顶部区域定位。
67.在一个实施例中,盘状物与喷洒方向组件的顶部区域处的孔之间的距离与盘状物与喷洒方向组件在底部区域处的孔之间的距离的比率在1:2至1:20之间,优选1:3至1:10。
68.根据一个实施例,盘状物的边缘和喷洒方向组件的内表面之间的最短距离在100微米和1毫米之间,更优选地在150微米和500微米之间。
69.根据一个实施例,在喷洒方向组件的底部区域处的孔附近的内表面被布置成相对于盘状物的表面的平面成角度,液体通过底部区域处的孔离开喷洒方向组件。
70.换言之,来自盘状物的液体撞击喷洒方向组件的内表面。在底部区域的孔处,雾化液体在向下倾斜于喷洒方向组件的内表面之后离开喷洒方向组件。雾化液体的方向由喷洒方向组件的下部处内表面的空间设计操纵。雾化液体朝向目标作物和/或区域的离开方向被布置成相对于盘状物的表面的平面成角度。
71.在一个实施例中,喷洒方向组件以相对于盘状物的表面的平面基本垂直的角度布置。在本文中,术语“基本垂直”是指90
°±
50
°
、优选90
°±
30
°
、更优选90
°±
20
°
以及最优选90
°±
10
°
的角度。
72.在一个实施例中,图1中离开喷洒方向组件的雾化液体旁边的箭头指示离开的雾化液体相对于盘状物的水平表面的可能方向的实施例。
73.在一个实施例中,轴附近的箭头表示轴的可能旋转方向。该旋转也可以是顺时针的。
74.在一个实施例中,盘状物上方的箭头表示盘状物的离心力方向和液体的雾化方向。
75.应注意,“雾化”并不是指单独的原子,而是涉及该术语关于喷洒系统的标准用法,意指大小不等的颗粒的细雾。
76.图2从另一侧视图的角度示出了根据图1的喷洒单元10的实施例。喷洒方向组件50部分地围绕盘状物30并且在顶部区域具有用于轴20和液体注施机40的孔52。喷洒方向组件50还在雾化液体离开喷洒单元的底部区域具有孔53。图2中靠近轴的箭头表示轴的可能旋转方向。该旋转也可以是顺时针的。
77.图3示出了根据图1的喷洒单元10的实施例,其中多个壁70位于喷洒方向组件50的内侧上。喷洒方向组件的内表面51(图中未标示编号)包括多个壁,其中多个壁的方向在相对于盘状物的横向侧面基本垂直的平面中延伸,另外,其中多个壁的平面相对于盘状物30的表面的平面基本垂直。
78.在一个实施例中,在多个壁的方向相对于盘状物的横向侧面的情况下,术语“基本垂直”是指90
°±
40
°
、优选90
°±
30
°
、更优选90
°±
20
°
的角度。
79.在一个实施例中,在多个壁的平面相对于盘状物的表面的平面的情况下,术语“基
本垂直”是指90
°±
30
°
,优选90
°±
20
°
,更优选90
°±
10
°
的角度。
80.根据一个实施例,多个壁径向地围绕(周向地)盘状物定位并且优选地围绕盘状物以彼此相等的距离定位。
81.图3中的箭头表示轴的可能旋转方向。该旋转也可以是顺时针的。
82.图4从底侧视图的角度示出了根据图3的喷洒单元10的实施例,其中多个壁70位于喷洒方向组件50的内侧上。盘状物30被示出为从下方穿过孔53(图中未标示编号)。盘状物部分地被喷洒方向组件围绕。喷洒方向组件的内表面51包括多个壁,其中多个壁的方向在相对于盘状物的横向侧面基本垂直的平面中延伸,另外,其中多个壁的平面相对于盘状物的表面的平面基本垂直。
83.在一个实施例中,盘状物的平面表面是指平面圆形截面,在所述平面圆形截面中液体从液体注施机撞击到盘状物上,并且旋转盘状物的离心力迫使液体雾化并且最终雾化的液体在平面表面的外围处离开盘状物。
84.在一个实施例中,箭头表示旋转盘状物的潜在旋转方向。该旋转方向也可以是顺时针的。
85.图5从底侧视图的角度示出了根据图1的喷洒单元10的实施例。盘状物30(虚线)被示出为从下方通过孔53。盘状物部分地被喷洒方向组件50围绕。喷洒方向组件在顶部区域处具有圆形孔52,在底部区域处具有椭圆形孔53。
86.在一个实施例中,箭头表示旋转盘状物的潜在旋转方向。该旋转方向也可以是顺时针的。
87.根据一个实施例,喷洒方向组件50的内表面51具有低摩擦表面。
88.在一个实施例中,喷洒方向组件的内表面是疏水的。
89.可以改变内表面的表面化学性。对于光滑的表面,可以通过这种方式改变喷洒液体(作为薄膜、韧带或滴)的表面附着力。对于水性液体,亲水性表面将具有带有较低滑度的较高附着力,而疏水性表面将具有带有较高滑度的较低附着力(对于油类反之亦然)。然而,对于光滑表面,可达到的附着力范围并不高(如狭窄的接触角范围所见)。
90.在一个实施例中,喷洒方向组件的内表面是有纹理的。内表面可以例如包括梳状结构。作为一个例子,3d打印可用于生成有纹理的表面结构。
91.在一个实施例中,有纹理的特征的尺寸在10纳米到100微米之间,优选地从1微米到80微米。
92.对于有微纹理的表面,附着力(和接触角)的范围显着扩大。(更多细节被呈现在bico等人的论文中,wetting of textured surfaces,colloids and surfaces a 206(2002)41-16)。
93.在一个实施例中,喷洒方向组件的内表面与水的接触角》110
°
,优选》120
°
。
94.在一个实施例中,喷洒方向组件的内表面是超疏水的,优选地与水的接触角》150
°
。
95.本领域技术人员已知,角越大,附着力越低。
96.在一个实施例中,喷洒方向组件的内表面被配置为发射防止液滴接触内表面的气垫。
97.有纹理的表面的润湿方面的最新进展已导致对广泛范围的液体不润湿的表面(更
多细节被呈现在a tuteja等人,robust omniphobic surfaces,pnas 105(2008)18200-18205,us 2019/0077968a1,us2019/0039796a1,us2015/0273518a1,https://en.wikipedia.org/wiki/liquiglide)。这种表面也可用于喷洒方向组件的内表面。
98.根据一个实施例,盘状物30的直径相对于喷洒方向组件50在底部区域处的孔53的最大直径之间的比率在1:2和1:20之间,优选地在1:4到1:10之间。
99.图6示出了根据图1的喷洒单元10的实施例,其中空气通道位于喷洒方向组件中。喷洒单元10类似于图1中讨论的喷洒单元,除了喷洒方向组件是双壁的之外。喷洒方向组件的两个壁之间的空间60被配置为将空气朝向喷洒方向引导。
100.在一个实施例中,两个壁之间的空间60也被称为一个(或多个)“空气通道”。
101.在一个实施例中,空气流由风扇驱动并且通过空间60从喷洒方向组件的顶部区域流到底部区域。
102.在一个实施例中,风扇可以是例如uav的推进器。来自推进器的向下风被引导通过空间60到喷洒方向组件的底部区域。例如,致动器控制通过空间60的空气体积流量/时间单位。
103.需要注意的是,空气体积流量/时间单位可以通过将空气速度乘以一定时间单位的空间/空气通道的横截面面积来计算。
104.在一个实施例中,喷洒方向组件的内表面确实包括,优选地基本均匀分布的空隙。空隙将空气朝向内表面引导并产生防止离开盘状物的液滴接触内表面的气垫。
105.在一个实施例中,图6中标示的箭头具有与在图1的上下文中讨论的类似的含义,除了靠近空间60的箭头表示空气流的流动方向是从喷洒方向组件的顶部区域到底部区域,然后朝向喷洒方向之外。
106.图7示出了根据图1的具有锥形盘状物30的喷洒单元10的实施例。喷洒单元10包括轴20、锥形盘状物30、液体注施机40以及喷洒方向组件50。
107.在一个实施例中,图7中标示的箭头具有与图1上下文中讨论的类似含义。
108.在一个实施例中,喷洒单元可用于喷杆喷洒器、无人驾驶飞行器(uav)、无人驾驶地面车辆(ugv)、机器人平台和背负式喷洒器。
109.图8示出了具有如关于图1所描述的喷洒单元10的喷雾运载工具100的示意性实施例。
110.在一个实施例中,运载工具是无人机或uav。
111.在一个实施例中,运载工具是陆地运载工具,诸如无人驾驶地面车辆(ugv)、机器人平台、拖拉机。
112.图9示出了具有不同喷洒单元及其相应喷幅的喷雾运载工具的示意性实施例。实施例a)中的喷雾运载工具包括具有旋转盘状物30但没有喷洒方向组件的喷洒单元。使用该喷雾运载工具进行喷洒所产生的喷幅沉积被示出在右侧并且具有m形状,该m形状具有横跨该喷幅的较大距离。在实施例b)中,喷雾运载工具包括旋转盘状物30和喷洒方向组件50,喷洒方向组件50在底部区域处具有圆形孔53。与如实施例a)中所示的喷幅相比,用这种喷雾运载工具进行喷洒产生了更均匀的喷幅。在实施例c)中,喷雾运载工具包括旋转盘状物30和喷洒方向组件50,喷洒方向组件50在底部区域处具有椭圆形孔53并且在内表面处具有多个壁70。喷幅在横跨喷幅的整个距离上是均匀的。实施例a)至实施例c)中盘状物30上的箭
头表示盘状物的旋转方向,该旋转方向也可以是顺时针的。
113.图10示出了喷雾运载工具100的示意性实施例,所述喷雾运载工具包括:液箱110;喷洒单元10,所述喷洒单元具有喷洒方向组件50,所述喷洒方向组件具有被配置为朝向喷洒方向引导空气的空间(空气通道)60;至少一个致动器120;多个传感器130以及处理单元140。液箱被配置为保持液体。至少一个喷洒单元被配置为喷洒液体。至少一个致动器被配置为控制通过喷洒方向组件的空间60朝向喷洒方向的空气流量。多个传感器中的至少一个传感器131被配置为测量喷雾运载工具相对于地面的速度。多个传感器中的至少一个传感器132被配置为测量关于喷雾运载工具的前-后轴线相对于喷雾运载工具的空气运动方向。多个传感器中的至少一个传感器133被配置为测量相对于喷雾运载工具的空气运动速度。处理单元被配置为确定相对于前-后轴线在地面上的投影的空气运动方向并确定相对于地面的空气运动速度,该确定包括利用喷雾运载工具的速度、关于喷雾运载工具的前-后轴线相对于喷雾运载工具的空气运动方向以及相对于喷雾运载工具的空气运动速度。处理单元被配置为控制至少一个致动器,其中用于控制至少一个致动器的至少一个指令的确定包括利用所确定的相对于前-后轴线在地面上的投影的空气运动方向,以及所确定的相对于地面的空气运动速度。
114.在一个实施例中,被配置为测量喷雾运载工具相对于地面的速度的至少一个传感器131包括gps系统。
115.在一个实施例中,被配置为测量喷雾运载工具相对于地面的速度的至少一个传感器131包括基于激光反射的系统。
116.在一个实施例中,被配置为测量相对于喷雾运载工具的空气运动方向的至少一个传感器132包括风向标。
117.在一个实施例中,被配置为测量相对于喷雾运载工具的空气运动速度的至少一个传感器133包括风速计。
118.在一个实施例中,被配置为测量相对于喷雾运载工具的空气运动速度的至少一个传感器133包括皮托管。
119.在一个实施例中,被配置为测量相对于喷雾运载工具的空气运动方向、速度(和距离)的至少一个传感器132和133包括激光雷达传感器,优选地多普勒激光雷达传感器。
120.在一个实施例中,“至少一个致动器”是指将能量转换为运动的至少一个机械设备。能量的来源可以是,例如,电流、液压流体压力、气动压力、机械能、热能或磁能。例如,电动马达组件可以是一种将电流转换为旋转运动并可进一步将旋转运动转换为线性运动以执行移动的致动器。以此方式,致动器可以包括电机、齿轮、联动装置、轮子、螺杆、泵、活塞、开关、伺服器或用于将一种形式的能量转换为运动的其他元件。
121.在一个实施例中,“至少一个致动器”是指控制通过空间60的空气流量的至少一个机械设备并且空气体积流量由uav推进器产生。
122.图11a和图11b分别示出了具有喷洒单元10的喷雾运载工具100的示意性实施例,以及根据不同风况对通过喷洒方向组件50的空气流量的控制。在该实施例中,喷雾运载工具是uav并且包括位于uav的推进器单元下方的至少一个喷洒单元。喷洒单元包括喷洒方向组件50,所述喷洒方向组件在喷洒方向组件的两个壁之间具有空间60,该空间被配置为朝向喷洒方向引导空气。多个传感器130尤其感测空气运动(风)的方向和速度。处理单元(未
示出)使用感测到的信息以指示至少一个致动器(未示出)来控制通过喷洒方向组件的空间朝向喷洒方向的空气流量。在图11a)的实施例中,风具有低风速,因此低容量空气流通过喷洒方向组件的空间朝向喷洒方向流动。在图11b)的实施例中,风具有高风速,因此高容量的空气流通过喷洒方向组件的空间朝向喷洒方向流动。
123.应注意,本发明的实施方案参考不同的主题进行了描述。具体而言,一些实施方案参考喷洒单元类型的权利要求进行描述,而其他实施方案参考喷雾运载工具类型的权利要求进行描述。然而,本领域技术人员将从上文和下文的描述中了解到,除非另有说明,否则除属于一类主题的特征的任何组合之外,涉及不同主题的特征之间的任何组合也被认为在本技术中公开。然而,所有特征都可组合在一起,从而提供比这些特征的简单总和更多的协同作用。
124.尽管已经在附图和前面的描述中详细地例示和描述了本发明,但是这样的例示和描述应被认为是说明性或实施例性的而不是限制性的。本发明不限于所公开的实施方案。通过研究附图、公开内容和从属权利要求,本领域技术人员在实践所要求保护的发明时可以理解和实现所公开的实施方案的其他变体。
125.在权利要求中,词语“包括”不排除其他元件或步骤,并且不定冠词“一”或“一个”不排除多个。单个处理器或其他单元可以实现权利要求中列举的若干项的功能。在互不相同的从属权利要求中引用某些措施这一事实,并不表示不能利用这些措施的组合来谋取利益。权利要求中的任何附图标记都不应被解释为限制范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。