弹性分布式定位网络
1.交叉引用
2.本技术要求于2021年1月15日提交的申请号为63/138,300的美国专利申请以及于2020年2月3日提交的申请号为62/969,264的美国专利申请的优先权,上述两个美国专利申请的全部内容通过引用并入本文。
技术领域
3.下文涉及使用信标发射器网络进行定位和定时的方法、系统和设备,该方法、系统和设备可以提供高精度、针对尤其由于信标在相同时间和相同频率信道上传输而造成的同信道干扰的恢复能力以及针对干扰和欺骗攻击的安全性的组合。
背景技术:
4.高精度、低延迟的定位、导航和定时(positioning,navigation,and timing,pnt)对用于小型无人机系统(small unmanned aerial systems,suas)和自动驾驶汽车的管理和导航的下一代室外系统的成功而言至关重要,并且该高精度、低延迟的定位、导航和定时用于下一代室内系统以便使工业物联网(industrial internet of things,iiot)成为可能并且满足联邦通信委员会(federal communications commission,fcc)对室内e911手机通话强制执行的
±
3米第80个百分位的z轴要求(正处于审查以减少到
±
2米)。在新兴的商用无人机行业,随着suas的普及,对1类(商用类)小型无人机系统(suas)之间以及suas与其他物体之间的碰撞检测和规避已经成为一个问题。随着诸如亚马逊和谷歌等商业企业推出其无人机送货服务,使得这些飞行器的密度以及对用于将它们导航到目的地的超视距(beyond-visual-line-of-sight,bvlos)命令和控制(command and control,c2)程序的需求急剧增加,解决这些问题将变得至关重要。出于这个原因,快速、准确和跨空域共享的pnt将成为下一代uas交通管理(uas traffic management,utm)系统的关键组成部分,该系统在诸如由nasa开发的utm试点项目(utm pilot project,upp)之类的常规空中交通管理(air traffic management,atm)系统之下和之外运行。由于1类suas的低海拔高度和雷达横截面使得它们难以使用传统的atm雷达来进行检测和定位,因此utm概念依赖于来自suas本身的位置报告,该位置报告在suas运行期间定期地进行或者应监控运行的utm服务供应商(utm service suppliers,uss)的要求而进行。随着suas的数量和密度的增长,对这种定位信息的时效性和精度要求也会越来越高。
5.当前的pnt概念使用从全球卫星导航系统(global satellite navigation system,gnss)接收的信号来提供该定位信息,该全球卫星导航系统例如为由美国运营和维护的全球定位系统(global positioning system,gps)并且由uas上机载的gnss芯片组来启用。除了少数例外(例如b.agee于2016年6月在proc.2016ion联合导航会议发表的“民用gnss信号的盲检测、解调和分离”,和b.agee于2020年9月被授予的第10,775,510号美国专利“用于弹性pnt应用的民用gnss盲解扩”),这些系统依赖于“相关”或“匹配滤波器”方法,这些方法检测gnss信号并通过将接收到的信号与发射的测距码的副本相关联来估计该
gnss信号的地理可观测量(例如在接收器处观察到的信号的到达时间(time-of-arrival,toa)和到达频率(frequency-of-arrival,foa)),并且在对从卫星飞行器(satellite vehicle,sv)到接收器的飞行时间进行补偿的调试toa中,以及在对卫星与接收器之间的多普勒频移进行补偿的调试foa中进行搜索。在“冷启动”场景中,在接收器的可能的视场(field of view,fov)内,卫星的特定测距码是未知的,并且接收器的内部时钟与通用时间坐标(universal time coordinate,utc)不同步,这需要对整个可能的测距码的库(例如,当前在轨的31颗gps卫星的31个测距码)与接收到的信号进行进一步的关联,并估计这些信号和每个复制码之间的观察到的toa和foa,即,在接收操作期间引起的额外的未知定时偏移和载波偏移。在没有任何关于卫星代码和相对于接收器的定时/载波偏移的先验信息的情况下,完成该搜索所需的首次定位时间(time-to-first-fix,ttff)可能超过30秒(冷启动ttff),而如果代码锁定丢失几个小时(热启动(warm-start)ttff)或短时间丢失(热态启动(hot-start)ttff)丢失,则可能花费1到2秒,并且在该时间段内耗电量巨大。此外,完整的定位和定时(positioning and timing,p/t)解决方案需要了解sv的星历(随时间变化的轨迹),例如,使用通过gps导航信号传输的gps卫星历书,这要耗费12.5分钟来完整下载该卫星历书。即使这样,也需要采集至少四个gps信号来提供初始p/t解决方案。
6.此外,gnss测距信号具有固有的低接收入射功率(received incident power,rip),这是由于从中地球轨道(medium-earth orbit,meo)或(用于印度海军和日本qzss系统的)地球同步轨道(geo-synchronous orbit,gso)中的卫星进行传播造成的。例如,gps l1 c/a信号被强制规定在地面具有至少-130dbm的rip,即,假设具有4db的累积接收器噪声系数,在该信号的2.046mhz的零点到零点带宽上具有-20db的信噪比(signal-to-noise ratio,snr)。这些信号在实践中很容易被抑制10到20db,例如,由于树木、树叶和建筑物墙壁的衰减,并且可能在山谷和城市峡谷中完全丢失。在rip低于-150dbm(snr低于-40db)时,例如由于将gps信号抑制到或低于本底噪声,即使在将信号解扩到50比特每秒(bit-per-second,bps)的gps导航信号速率(~43db处理增益)之后采集也可能完全失败,或者由于1023芯片c/a复制码与从gps sv接收的实际码之间的非零(-24db)互相关所引起的“错误锁定”(例如,a.brown、p.olsen于2006年6月在proc.ion第61届年会上发表的“使用网络辅助的gps进行城市/室内导航”第1-6页),采集也可能完全失败。gnss解决方案也容易受到由于电离层传播、卫星定位和定时误差以及(尤其是对于低空飞行器或城市环境中的)镜面多径引起的系统化(或系统性?)误差的影响。
7.在重新utm应用中,即使使用广域增强系统(wide area augmentation system,waas)以提高定位精度,基于gps的商用飞机着陆系统所需的、以及准确的uas交通管理所需的稳定的亚米级高度精度可能需要几分钟到几小时才能实现。此外,suas接收器特别容易受到同信道干扰(co-channel interference,cci)的影响,例如,suas平台的故意干扰,或由于所谓的“个人隐私设备(personal privacy device,ppd)”造成的无意干扰,这是由于即使在适度的高度,suas仍具有大的fov,以及干扰源与suas之间的典型的视线(line-of-sight,los)传播造成的。所有这些问题都可能导致在低空和密集部署场景中的定位能力出现严重失误,在这些场景中,几英尺的误差会极大地增加suas彼此之间、或者与建筑物、地面车辆甚至人员发生碰撞的风险。
8.最后,认识到基于gps的系统难以提供自动驾驶车辆所需的厘米级水平精度和10
毫秒的跟踪能力。出于这个原因,verizon最近宣布推出一个全国性的参考站网络,以实现实时运动学(real-time kinematics,rtk),这是一种通过使用载波相位作为除了toa和foa之外的定位地理可观测量来提高gps信号的可靠性的方法。如在i.miller、c.cohen、r.brumley、w.bencze、b.ledvina、t.holmes、m.psiaki于2016年6月被授予的第9,360,557号美国专利“用于快速获取访问高精度位置、导航和/或计时解决方案的系统、方法、设备和子组件”中所述的,rtk长期以来一直用于在测量和高精度计时应用中提供精确点定位(precise point positioning,ppp)和计时测量;然而,它需要仔细校准gps发射器和用户接收器处的例如由两个设备中的混频器本地振荡器(local-oscillator,lo)、电缆和滤波模块引起的系统相位偏移;以及需要用于解决载波相位地理可观测量中的周期性模糊的装置;因此需要一种参考网络来执行系统校准并至少部分地减少周期性模糊。此外,在链路任一端引起的lo相位噪声可能需要快速跟踪该系统相位,和/或昂贵的lo和/或辅助接收器硬件来精确地控制或校准以及补偿该相位噪声。因此,支持rtk的独立系统可能耗费长达30分钟才能实现精确的解决方案。此外,该方法本质上容易受到时变多路径(例如,由车辆在近场散射体附近运动引起的杰克斯定律多路径)的影响,即使在使用精确参考系统时,该时变多路径也会影响基于rtk的解决方案的稳定性。目前可用的rtk系统,诸如swift navigations的skylark cloud基准站和starling定位引擎,宣称rtk收敛时间仅为20秒,而重新获取时间为1秒,但它们只能提供大于10厘米的80%循环错误概率(80%circular error probability,cep80),并且仅适用于固定用户(两种产品均未提供跟踪功能)。
9.针对这些问题,多年来已经提出了许多替代导航(altnav)解决方案。这些解决方案包括locata的“locatalite”信标系统,如在j.cheong、x.wei、n.politi、a.dempster、c.rizos于2009年12月在proc.2009ignss研讨会上发表的“表征locata的基于伪卫星的位置系统的信号结构”、c.rizos,l.yang于2019年4月在sensors 2019,19(8),1821中发表的“locata陆地试验定位和定时技术的背景和最新进展”、f.van grass、s.meiyappan于2014年12月提交给国家天基定位、导航和定时咨询委员会的“使用都市信标系统的地面gps增强”中描述的nextnav的都市信标系统(metropolitan beacon system,mbs)、j.vogedes、g.pittabiraman、a.raghupathy、a.sendonaris、n.shaw、m.shekhar于2014年4月在v.g1.0发表的已被纳入lte release 13的都市信标系统(mbs)icd(一种陆地信标系统的实施方式)(两者均在接收器处采用dsss测距信号和相关解扩方法)中所述的;并包括satelles的基于铱的系统,例如d.whelan、g.gutt于2015年12月15日被授予的第9,213,103号美国专利“通过使用具有高功率信号的卫星系统以提高建筑物穿透率的单元获取定时和定位”,该美国专利利用从低地球轨道(low-earth orbiting,leo)铱sv发射的窄带(~25khz)信号;以及包括利用“泛在无线信号”(signals of opportunity,sop)的系统,例如,m.rabinowitz、j.spilker、s.furman、d.rubin、h.samra、d.burgess、g.opshaug、j.omura于2012年7月31日被授予的第8,233,091号美国专利“使用电视同步信号进行定位和定时传输”,该专利利用了从已知位置发射的具有已知时间同步信号分量的蜂窝和广播电视信号。这些解决方案解决了一些但不是全部的gnss漏洞,并且具有自身的弱点。特别是,伪卫星、locatalite和nextnav系统极易受到由发射节点之间的路径损耗的极端差异导致的“近远”干扰的影响。缓解这个问题需要过多的积分时间来使用相关方法分离同信道信号,或者需要在广泛分离的频率信道或时隙上传输信号来完全避免这种情况。例如,nextnav的系统将信号分成以1
秒的时间间隔分开的10个100毫秒的时隙,这对于冷启动ttff要求进行5到6秒的连续接收,而对于热启动ttff要求进行1秒的连续接收,甚至然后要求在室外环境中提供30米的初始中值水平定位精度(cep50)(van grass,幻灯片13),而在优化的“本地”环境(例如校园、商场和类似仓库的区域)中提供4米的初始中值水平定位精度(van grass,幻灯片16)。同样地,尽管locata报告了其10.23mcps测距系统(rizos)的厘米级精度,但该精度需要将其信号跳时10倍(cheong),从而产生与gps系统相同的ttff。
10.尽管satelles的系统可以利用铱卫星的leo sv网络提供的高得多的rip和多普勒频移,但铱卫星信号至少需要一个4.32秒(48帧)的超帧,并且通常需要两到三个超帧(8.64到12.96秒),以便从铱环通道获取和得到卫星星历。此外,25khz xgps信号带宽在每个时隙基础上提供固有较差的toa地理可观测量估计,例如当sv进入接收器的fov时需要很多分钟才能提供小于100ns的定时同步。
11.其他的解决方案使用蓝牙低功耗(bluetooth low energy,ble)信标、lte位置参考信号(position reference signal,prs)和基于802.11的定位系统。这些系统都不能提供下一代5gnr系统所需的精度和延迟,例如,3米的xyz定位精度、小于1秒的ttff和20毫秒的延迟,以及0.5米/秒的xyz速度精度。这些系统也不能满足fcc的2024年目标,即用于e911应用场合的
±
3米80%z轴手机定位精度。
技术实现要素:
12.本发明的各方面可以使用弹性分布式定位网络(resilient distributed positioning network,rdpn)来克服这些问题。在该弹性分布式定位网络中,多个网络提供的同信道导航信标从节点(例如,网络节点)网络在公共频率信道上被传输给用户、网络提供的同信道信标从用户被发送并且在网络节点处被接收、或者导航信标从网络节点被发送、通过用户转发并且被网络节点接收。本发明描述了克服现有的pnt系统的漏洞的各个方面和特征。这些方面和特征包括(但不限于)以下内容:
13.●
使用灵活的专用多音导航信号(类似于在非对称数字用户线路(asymmetric digital subscriber line,adsl)电缆系统中使用的离散多音(discrete multitone,dmt)信号)、lte单载波频分多址(single-carrier frequency-division multiple-access,sc-fdma)上行链路信号或正交频分复用(orthogonal frequency-division multiplexed,ofdm)下行链路信号、或802.11信号或802.16信号,但其中符号持续时间和子载波频率间隔与网络预期的应用场合的预期toa和foa相匹配。这与“一刀切”的gnss设计相反,该设计必须提供全球覆盖范围并且适应gnss发射器与接收器之间的宽toa和foa范围。特别地,本文描述的一个方面采用了1类小型无人飞行器系统(suas)所期望的符号持续时间和子载波频率间隔,该系统运行于122米(400英尺)的标称最大海拔高度(above ground level,agl)和44.7米/秒(100英里/小时)的最大空速。假设rdpn网络节点被部署在50-150英尺agl的高度,例如,在蜂窝塔上,在折射率为4/3的球形地球的假设下,在这些高度或以下运行的网络节点与任何suas之间的最大视距被限制为73.4公里,从而将链路toa限制在245μs以下。类似地,考虑到最大suas空速限制,链路foa在902-928mhz ism频段内为
±
140hz以内,在2.4-2.485ghz频段内为
±
340hz以内。相比之下,针对从meo传输的l频段gnss信号获得的toa范围为67-94ms并且foa范围为
±
6khz。
14.●
使用堆叠载波扩频(stacked-carrier spread spectrum,scss)调制格式来对子载波进行扩展(例如,在b.agee于2000年10月被授予的第6,128,276号美国专利“堆叠载波离散多音通信技术和与代码归零、干扰消除、反向通信和自适应天线阵列的组合”中),这种扩展适用于对这些导航信号提供可利用的频谱,并且在某些方面,提供时间冗余。这种频谱冗余使得p/t计算机能够使用经验证的、成熟的和高度弹性的代码归零或c类线性最小均方误差(linearminimum-mean-square error,lmmse)方法,这些方法可以分离那些质量仅受这些信号的接收信噪比(snr)限制,而不受这些信号的接收信干比(sir)限制的同信道接收的信标,即使存在来自近距离的发射器的严重干扰(近远干扰)。与受接收信干噪比(signal-to-interference-and-noise ratio,sinr)限制的传统相关解扩器或匹配滤波器解扩器相比,这能够以设计允许的最大功率或者以对发射频带施加的监管功率限制发送信标,并且使得导航接收器能够在没有传统相关方法施加的自干扰的情况下实现高功率的全部益处。
15.●
在某些方面,使用经过优化以将发射的空间信号(signals-in-space,sis)的峰值平均功率比(peak-to-average power ratio,papr)降低到到3至4db范围的低相关相位调制子载波分量(用于形成完整的scss子载波集的内码和外码)来构建导航信号,从而大大提高了信标发射器的成本和效率。在基线实例化中,使用p/t解决方案计算机已知的唯一的内码和外码来生成每个信号,以便生成导航信号,从而提供一种在检测操作期间对每个接收到的信标进行唯一识别的手段。迄今为止,已识别出数千个低相关、低papr的子载波分量,这使得每个信标能够具有数百万个独特的子载波集。
16.●
在p/t解决方案计算机上,使用子载波解调方法,该方法能够通过下述方式实现代码归零方法的完整信号分离能力:消除由接收器处信标的观测到的高toa(例如,由于信标发射器与接收器之间的倾斜范围,以及信标发射器与接收器之间的内部定时偏移)引起的符号间干扰,以及消除由接收器处信标的观测到的高foa(例如,由于信标发射器或接收器的移动,以及由于在信标发射器和接收器处使用的本地振荡器(lo)之间的内部偏移)引起的子载波间干扰。
17.●
利用连接到用户和集中式网络运营中心(network operation center,noc)或多接入边缘计算机(multi-access edge computer,mec)的通信网络来配置由网络使用的导航信号,并且将数据快照或p/t解决方案回传到noc。除其他优点外,这使得能够无需通过导航数据(例如,信标配置数据、网络节点位置或大气损害信息)进行调制即可传输导航信号。如果需要,可以通过连接到用户的辅助无线通信网络传输此类信息。因此,导航信号可被设计为优化对p/t解决方案所需的地理可观测量的估计、最小化任何定位和定时解决方案的ttff(通过消除为这种解决方案获取足够的导航信息所需的时间)、和/或减少网络上的对干扰和欺骗攻击的脆弱性。
18.这些特点能够消除对时隙化或跳时的需求,以便避免远近干扰,并且能够在比竞争方法低得多的ttff中以高精度确定地理可观测量。该精度和ttff优势可以换取多个系统参数,例如延迟、可用带宽、可用功率等,以便满足网络或用户的需求。
19.所公开的rdpn各个方面可以在以下至少三种网络拓扑中实现:
20.●
弹性分布式发射器网络(resilient distributed transmitter network,rdtn),在该网络中,位于经校准的位置处的地理分布式网络节点从被连接到这些网络节点
的网络运营中心(noc)(例如多接入边缘计算机(mec)或uas服务供应商(uss))获取信标时间符号或配置数据;如果需要,生成信标时间符号;并且在网络用户的fov中传输包括那些信标时间符号的信标。一方面,用户收集覆盖信标传输频带的数据的快照、使用在同样连接到noc的无线通信网络(例如lte、4g或5gnr蜂窝网络、802.11无线局域网(wireless local area network,wlan)、或802.15zigbee或蓝牙网络)上获得的信标配置数据来确定其自身的p/t解决方案、以及可选地通过无线通信网络将该p/t解决方案传送给noc。在第二方面,用户收集覆盖信标传输频带的数据的快照,并通过无线通信链路将这些快照回传到noc。然后,noc确定该用户的p/t解决方案,并且可选地通过无线通信网络将该p/t解决方案传送给用户。
21.●
弹性分布式接收器网络(resilient distributed receiver network,rdrn),在该网络中,用户通过同样连接到noc的无线通信网络从noc获取信标时间符号或信标配置数据、生成这些信标时间符号(如果需要)、并且在网络节点的fov中发送包括这些信标时间符号的信标,该网络节点位于经校准的位置处并且通过通信链路连接到noc。于是网络节点接收覆盖信标传输频带的数据的快照,并将这些快照回传到noc,noc使用网络节点位置和信标配置数据计算p/t解决方案,并且通过无线通信网络选择性地将该解决方案传输给用户。
22.●
弹性分布式收发器网络(resilient distributed transceivernetwork,rdxn),在该网络中,位于经校准的位置处并且通过通信链路连接到noc的地理上分布式的网络节点将信标传输给用户,用户接收、调节并重新传输信标,而不进行其他处理。然后,位于用户的fov中的网络节点捕获这些被重传的信标的快照并将这些快照回传给noc,noc根据这些快照计算p/t解决方案,并且通过无线通信链路选择性地将该解决方案传输给用户。
23.在某些方面,rdpn还部署有2-6个同样连接到noc的校准接收器以便使网络节点进入时间和载波同步,和/或提供noc在地理定位运行期间所使用的时间偏移/载波偏移。校准接收器还可用于定位网络节点,例如,当它们首次被部署在网络的战区中时。其他的方面使用通过低速率数据链路提供的信标校准信息在网络节点处执行这些操作。
24.这种方法可以提供许多竞争性gnss或非gnss方法所不具备的优势,包括(但不限于)以下任何一项:
25.●
由于能够利用接收到的信标的完整snr并避免时隙,因此具有非常快速和精确的首次定位时间(ttff)。在为商业1类uas交通管理实例执行的大区域模拟中,该方法演示了使用由分布在16,480平方公里的区域(半径40公里的圆)上的50个网络节点组成的网络在10毫秒内对分布在3,196平方公里区域(半径18公里的圆)上的100个1类suas进行检测和地理定位,而无需事先了解信标发射频率和定时相位,其中每个网络节点都传输一同信道信标,该同信道信标具有19.2mhz有效带宽和2,472mhz载波频率(2.4ghz信道13,未被美国国内的802.11wlan使用),并且具有30dbm的发射功率和36dbm的发射eirp(符合fcc第15部分对2.4-2.485mhz ism频段的要求)。对于10毫秒的快照,系统以1.8米的80%z轴定位误差(均低于4.6米,即,15英尺waas z轴目标误差)和5毫米的80%xy定位误差对用户进行地理定位。该系统进一步使用户同步到44皮秒的80%时钟定时和36毫赫兹的lo载波偏移估计误差以内,以及使用户同步到15万亿分之一(parts-per-trillion,ppt)的时钟速率估计误差以内或者接近stratum-1的性能。
26.●
通过利用用户机载的现有设备并允许在中央处理站点执行最复杂的操作,降低用户对尺寸、重量和功率(size-weight-and-power,swap)以及成本(cost,swap-c)的要求。用户需要的唯一附加设备是接收器(rdbn)、发射器(rdrn)或转发器(rdtn)。此外,网络的功率和带宽要求允许使用市场上已有的廉价软件设计无线电(software-designed radio,sdr)产品来实现网络。例如,一方面,可以在用户和网络节点处使用单个hackrf one sdr模块(成本300美元)来实现rdpn,其中使用额外的低成本放大器和天线将信标传输eirp提高到36dbm。
27.●
对多径干扰和同信道干扰的固有弹性。镜面多径将会创建已传输信标的多个副本,这多个副本在每次反射的toa和foa方面都具有可分离的特征。可以使用相同的处理算法分别检测直接路径和反射路径,并估计该直接路径和反射路径的toa和foa;此外,使用唯一的子载波分量使得多径分量能够被唯一地关联到每个信标发射器。一旦进行了估计,直接路径分量可以被识别并用于后续的地理定位操作;或者,整个多径集合可被用于使用光线追踪或无线电指纹识别方法来进一步细化用户位置(例如,以下参考文献可适用于本文所公开的方面:o.hilsenrath、m.wax于2000年2月被授予的第6,026,304号美国专利“用于无线通信网络服务和管理的无线电发射器位置查找”,以及m.wax、o.hilsenrath于2000年8月被授予的第6,108,557号美国专利“用于无线通信系统中的位置确定的签名匹配”)。
28.●
通过在一个或多个信标生成站点使用不可预测地/随机地确定的子载波分量以及在位置/定时解决方案站点使用代码归零方法,针对恶意欺骗者、中继器和窄带干扰器/音频干扰器具有固有的物理安全性。特别是,该方法通过在任何接收器处防止攻击者压倒和取代现有信标,提供了针对中间人(man-in-the-middle,mitm)攻击的固有保护。在大多数情况下,例如,如果欺骗者使用网络外部的一个或多个子载波组件,则欺骗者将在弹性检测操作期间被排除。在最坏的情况下,处理站点将检测到在后续的地理定位操作中可被识别的恶意信号。同样,恶意中继器会产生类似于多径的影响,从而产生可检测的/可分离的信号副本,这些信号副本在后续的地理定位操作中可被识别到。在一些方面,信号由可用于明确地分离经授权信号与欺骗信号的附加的phy“水印”调制。
29.●
在noc处执行导航信号生成和p/t解决方案计算操作的方面中具有固有的操作安全性。此功能使得能够使用不具有黑电平comsec模块的sdr设备来实现信标发射器和信标接收器,并且可以在被对手捕获时擦除。此外,一个或甚至多个网络节点的妥协或丢失只会导致整个网络的地理定位能力发生小幅的下降。
30.●
在使用空间分集/极化分集的天线阵列的用户或网络节点的发射器或接收器处对用户或网络节点进行的无缝扩展。分集接收阵列针对恶意宽带干扰器提供了额外的弹性,并允许实施复制辅助测向(direction finding,df)方法来确定接收到的信标的到达方向(direction of arrival,doa),以及允许实施复制增强df方法来确定干扰器的doa。doa可被用于进一步细化用户的地理定位和同步解决方案,以及用于进一步确定它们的偏航-俯仰-滚转方向。通过为处理站点提供手段以便确定从信标发射器到接收器的传输方向(directions of transmission,dot),分集发射阵列提供了额外的安全性和性能改进,而不会增加这些接收器的复杂度,即使接收器正在使用单个接收天线。除了其它优点之外,这可以提供下述的一种手段,该手段用于通过使用信标的唯一dot(地理锁定)将信标发射器的实际位置与感知位置相关联,来可靠地从接收到的信标中识别/消除欺骗者以及恶意中
继器。此外,这种能力可被用于将信标发射器的干涉检测足迹减少发射天线的数量,从而进一步提高网络在军事应用中的运行安全性。
31.●
以进一步的安全性和可扩展性改进来扩展网络实例,这包括合并时隙和频率信道,以及对网络中的信标发射器和信标接收器使用时隙信道跳变(time-slotted channel-hopping,tsch)协议。tsch协议可以提高rdrn和rdxn的可扩展性,以便将信标传输的数量保持在该方法的信标分离阈值之下。同时,可以采用不可预测的tsch方法,诸如通过采用物理安全方法(诸如b.agee于2017年5月被授予的第9,648,444号美国专利“无线m2m网络的物理安全数字信号处理”和b.agee于2020年10月被授予的第10,812,955号美国专利“为无线m2m网络生成具有不可预测的传输特性的信号”)用以在所公开的方面中进一步避免中间人攻击。该特征在rdtn中特别有吸引力,例如,如果网络节点能够在所有时隙和频率信道上连续地传输,那么因为用户可以选择任何频率信道以便在任何时隙上进行接收,则用户能够避开具有过度干扰的信道,并能够使任何试图在任何特定时隙或特定信道上对用户进行攻击的攻击者完全混淆。
32.第一方面涉及一种方法,该方法用于从网络节点向网络用户传输信标信号、从网络用户向网络节点传输信标信号、和/或使用弯管转发器通过网络用户向网络节点转发信标信号并从网络节点转发信标信号。方法包括在信标信号中引入频谱冗余和时间冗余中的至少一种;以及利用频谱冗余和时间冗余中的至少一种在网络用户、网络节点或中央处理站点处分离接收到的信标信号。
33.第一方面的方法还可包括根据分离出的信标传输确定地理能观测量。方法还可包括根据地理能观测量确定定位和/或定时。信标信号可被以一精度进行分离,该精度取决于信标信号的、在接收器本底噪声之上的功率,并且与在相同时间和相同频率接收的其它信标信号无关。
34.第二方面涉及一种方法,该方法用于从网络节点向网络用户传输信标信号、从网络用户向网络节点传输信标信号、或者使用弯管转发器通过网络用户向网络节点转发信标信号和从网络节点转发信标信号。方法包括在信标信号的每一个中引入频谱冗余和时间冗余中的至少一种,从而使得接收器能够利用频谱冗余和时间冗余中的至少一种来分离接收到的信号的快照中的信标信号中的多个信标信号。
35.第三方面涉及一种方法,包括生成接收到的多个信标传输的快照,这多个信标传输中的每一个都具有频谱冗余和时间冗余中的至少一种;以及利用频谱冗余和时间冗余中的至少一种来分离快照中的信标传输中的多个信标传输。
36.在第三方面中,可在网络用户处或在网络节点处执行生成和利用。可在网络用户处执行生成并在noc处执行利用。可在网络节点处执行生成并在no c处执行利用。可在网络用户处执行生成并在网络节点处执行利用。
37.在第四方面中,方法包括对接收到的多个信标传输的快照进行接收,这多个信标传输中的每一个都具有频谱冗余和时间冗余中的至少一种;以及利用频谱冗余和时间冗余中的至少一种来分离快照中的信标传输中的多个信标传输。
38.noc可被配置为执行第三方面的方法,其中,快照由网络用户生成并且由noc经由无线网络接收;或者其中,快照由网络节点生成并且由noc经由回程网络接收。
39.第五方面涉及一种方法,包括接收多个信标传输以产生接收到的信号,这多个信
标传输中的每一个都具有频谱冗余和时间冗余中的至少一种;以及生成接收到的信号的快照,其中,快照保留频谱冗余和时间冗余中的至少一种;并且其中,频谱冗余和时间冗余中的至少一种能够被用于分离多个信标传输。网络用户或网络节点可以被配置为执行第五方面的方法。
40.第六方面涉及一种方法,包括合成多音信标信号,其中,根据到达时间和到达频率的预期范围为网络用户选择多音信标信号的子载波间隔和符号持续时间;在多音信标信号上引入频谱冗余或时间冗余中的至少一种;以及向网络用户发送多音信标信号。
41.第七方面涉及一种方法,包括接收多个多音信标信号;以及利用这多个多音信标信号中的频谱冗余来使用代码归零方法或c类线性最小均方误差方法对多个多音信标信号进行分离。
42.一些方面涉及一种设备,包括至少一个处理器、与该至少一个处理器进行电子通信的至少一个存储器,以及被存储在至少一个存储器中的指令。能够被至少一个处理器执行的指令可实施上述各方面中任一个方面的方法。
43.一些方面涉及一种计算机程序产品,包括一种计算机可读的硬件存储设备(诸如非暂态的计算机可读存储器),该计算机可读的硬件存储设备在其中存储有计算机可读的程序代码,其中,程序代码包括指令,该指令能够被计算机系统的一个或多个处理器执行以便实施上述各方面的方法中的任一个方法。
44.一些方面涉及一种设备,包括装置,该装置用于执行上述各方面的方法中的任一个的每个步骤。
45.第八方面涉及一种设备,包括用于从网络节点向网络用户传输信标信号的装置、用于从网络用户向网络节点传输信标信号的装置、和/或用于使用弯管转发器通过网络用户向网络节点转发信标信号和从网络节点转发信标信号的装置。设备还包括用于在信标信号中引入频谱冗余和时间冗余中的至少一种的装置;以及用于利用频谱冗余和时间冗余中的至少一种来在网络用户、网络节点或中央处理站点处分离接收到的信标传输的装置。设备还可包括用于根据分离出的信标传输确定地理能观测量的装置,以及用于根据地理能观测量确定定位和/或定时的装置。
46.用于从网络节点向网络用户传输信标信号的装置可包括位于经校准的位置处的地理分布式网络节点,该地理分布式网络节点可被通讯连接到用于中央处理的装置。用于传输信标信号的装置可包括rdpn或rdtn。示例性的网络节点包括与蜂窝传输塔或802.11接入点共同定位的固定室外发射器、与802.11wlan或802.15蓝牙或zigbee网络共存的室内发射器、或独立的发射器。用于中央处理的装置可以包括noc,例如5gnr mec或uss,其通过用于在网络节点与用于中央处理的装置之间传送数据的装置来为每个网络节点提供配置数据或时间符号。用于传送数据的装置可以包括基于以太网的网络、plc网络、802.11wlan、802.15zigbee或蓝牙网络,和/或3g、4g lte或5g蜂窝网络。用于传输信标信号的装置可以包括计算机处理器和计算机可读存储器,该计算机可读存储器进行编程使得处理器生成和/或传输信标信号。
47.用于从网络用户向网络节点传输信标信号的装置可以包括用户设备上的无线通信装置,该无线通信装置被配置为通过辅助无线通信链路从用于中央处理的装置接收导航信号或信标配置信息,以及在被配置为接收信标信号的网络节点的fov中传输信标信号。此
外,用于传输信标信号的装置可以包括用于生成信标信号的装置。用于传输信标信号的装置可以包括计算机处理器和计算机可读存储器,该计算机可读存储器进行编程使得处理器生成和/或传输信标信号。
48.用于转发信标信号的装置可以包括无线通信收发器,该无线通信收发器接收、调节和重传信标信号,而无需另外处理它们。然后,用户的fov中的网络接收器(例如,网络节点)捕获并回传那些被重传到用于中央处理的装置的快照,该用于中央处理的装置可以根据快照计算出p/t解决方案,并将解决方案通过辅助无线通信链路传输给用户。因此,用于转发信标信号的装置可以进一步包括用于辅助无线通信链路的无线接收器。用于转发信标信号的装置可以包括计算机处理器和计算机可读存储器,该计算机可读存储器进行编程使得处理器接收和传输信标信号,并且可选地,接收p/t解决方案。用于转发信标信号的装置可以包括rdxn。
49.用于引入的装置可以包括调制器,该调制器被配置为执行子载波扩展调制,诸如scss调制。在一个示例中,内码在多个簇(cluster)上被复制,通过外码的一个元素对每个簇进行调制。可以通过用宽带信号扩展窄带信号来实现频谱冗余。用于引入的装置可包括被配置为重复时间符号的调制器。时间符号可被组织在时隙中,其中每个时隙被多次重复。用于引入的装置可以包括计算机处理器和计算机可读存储器,该计算机可读存储器进行编程使得处理器执行符号的扩展和/或重复。软件定义的无线电就是这种处理器的一个例子。用于引入的装置可以包括多音调制器,该多音调制器可以采用dft、idft、fft、ifft、多相滤波器和/或离散滤波器组。
50.用于利用的装置可以包括具有指令的任何装置或计算机程序产品,该指令实现用于在快照中去除cci的弹性检测操作。用于利用的装置可以包括消除符号间干扰和子载波间干扰的子载波解调器。用于利用的装置可以执行代码归零或c类线性最小均方误差(lmmse)操作,以分离同信道接收的信标信号,该信标信号的质量仅受这些信号的接收snr限制,而不受这些信号的接收sir限制。用于利用的装置在其发射器或接收器处可以进一步包括空间分集/极化分集天线阵列,该天线阵列能够通过复制辅助的df方法来确定信标信号的doa,以及能够通过复制增强的df方法来确定干扰器的doa。用于利用的装置可以进一步包括用于信道化的装置。
51.用于信道化的装置可以包括dft,诸如稀疏dft、加窗dft或其组合。可以使用等效结构,例如被配置成用于快照信道化的滤波器。用于信道化的装置可以包括具有对快照进行信道化的指令的任何装置或计算机程序产品。在一个方面中,用于信道化的装置去除估计出的粗略的(冷启动)lo偏移或观察到的精细的(热/热态启动)lo偏移,并在必要时去除定时偏移。用于信道化的装置可以使用加窗的dft将快照分离为频率子载波和时间符号。
52.第九方面涉及一种设备,包括用于生成接收到的多个信标传输的快照的装置,多个信标传输中的每一个都具有频谱冗余和时间冗余中的至少一种;以及用于利用频谱冗余和时间冗余中的至少一种来分离快照中的信标传输中的多个信标传输的装置。
53.用于生成快照的装置可以包括具有指令的任何装置或计算机程序产品,当例如基于来自用于中央处理的装置的提示或在预定的快照收集时间而指向该指令时,对快照进行收集。用于生成的装置可以包括被配置为接收信标信号的接收器前端、下变频器和adc,以及其它无线电部件。用于生成的装置可以包括sdr。
54.第十方面涉及一种设备,包括用于对接收到的多个信标传输的快照进行接收的装置,多个信标传输中的每一个都具有频谱冗余和时间冗余中的至少一种;以及用于利用频谱冗余和时间冗余中的至少一种来分离快照中的信标传输中的多个信标传输的装置。
55.用于接收快照的装置可以包括辅助无线通信接收器,该辅助无线通信接收器被配置为接收由网络用户在辅助无线通信链路上发送的快照。辅助无线通信接收器可以是802.11wlan接收器、802.15zigbee接收器、蓝牙接收器、3g、4g lte或5g蜂窝接收器。用于接收快照的装置可以包括连接到信标通信总线的接收器,该信标通信总线将noc与网络节点连接,并且接收器可以是以太网接收器、plc接收器、光纤接收器、802.11wlan接收器、802.15zigbee接收器、蓝牙接收器、3g、4g lte或5g蜂窝接收器。
56.第十一方面涉及一种设备,包括用于接收多个信标传输以产生接收到的信号的装置,多个信标传输中的每一个都具有频谱冗余和时间冗余中的至少一种;以及用于生成接收到的信号的快照的装置,其中,快照保留频谱冗余和时间冗余中的至少一种;并且其中,频谱冗余和时间冗余中的至少一种能够被用于分离多个信标传输。
57.用于接收多个信标传输的装置可以包括被配置为接收发射的信标信号的无线电的接收器前端。用于接收的装置可以包括下变频器和adc,以及其它无线电部件。在一些方面中,用于接收的装置包括sdr。用于接收的装置可以包括网络用户的信标接收器,该信标接收器被配置为接收信标传输,诸如从网络节点传输的信标信号。用于接收的装置可以包括被配置为从网络用户接收信标传输的网络节点。用于接收的装置可以包括rdrn中的网络节点和/或rdtn或rdxn中的网络用户。
58.第十二方面涉及一种设备,包括用于合成多音信标信号的装置,其中,根据到达时间和到达频率的预期范围为网络用户选择多音信标信号的子载波间隔和符号持续时间;用于在多音信标信号上引入频谱冗余或时间冗余中的至少一种的装置;以及用于向网络用户发送多音信标信号的装置。
59.用于合成多音信标信号的装置可包括多音调制器,该多音调制器可以采用dft、idft、fft、ifft、多相滤波器和/或离散滤波器组。用于合成的装置可以包括至少一个处理器和与至少一个处理器进行电子通信的至少一个存储器,以及被存储在至少一个存储器中以执行多音信号生成的指令。软件定义的无线电就是这种处理器的一个例子。
60.第十三方面涉及一种设备,包括用于接收多个多音信标信号的装置;以及用于利用多个多音信标信号中的频谱冗余来使用代码归零方法或c类线性最小均方误差方法对多个多音信标信号进行分离的装置。
61.用于接收多个多音信标信号的装置可以包括多音解调器,该多音解调器可以采用dft、idft、fft、ifft、多相滤波器和/或离散滤波器组。用于接收的装置可以包括至少一个处理器和与至少一个处理器进行电子通信的至少一个存储器,以及被存储在至少一个存储器中以执行多音解调的指令。软件定义的无线电就是这种处理器的一个例子。
62.第十四方面涉及一种设备,包括用于从网络节点向网络用户传输信标信号的装置、用于从网络用户向网络节点传输信标信号的装置、和/或用于使用弯管转发器通过网络用户向网络节点转发信标信号和从网络节点转发信标信号的装置。设备还包括用于在信标信号中引入频谱冗余和时间冗余中的至少一种的装置,从而使得接收器能够利用频谱冗余和时间冗余中的至少一种来分离接收到的信号的快照中的信标信号中的多个信标信号。
63.前文已经相当广泛地概述了根据本发明的示例的特征和技术优势,以便可以更好地理解下文的详细描述。下文将描述附加的特征和优点。所公开的概念和具体示例可以容易地被用作对其他结构进行修改或设计以实现本发明的相同目的的基础。这种等效结构不脱离所附的权利要求的范围。当结合附图考虑时,根据下文的描述将更好地理解本文公开的概念的特征、它们的组织和操作方法以及相关的优点。提供每个附图仅用于说明和描述的目的,而不是作为对权利要求的限制的定义。本发明中提及的所有专利出版物和非专利出版物的全部内容均通过引用并入本文。
附图说明
64.通过参考以下附图可以实现对本发明的本质和优点的进一步理解。在附图中,相似的部件或特征可以具有相同的附图标记。
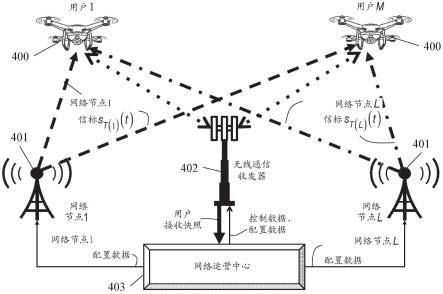
65.图1示出了可根据本发明的一些方面实例化的弹性分布式发射器网络。
66.图2示出了可根据本发明的一些方面实例化的替代的弹性分布式接收器网络。
67.图3示出了可根据本发明的一些方面实例化的替代的弹性分布式转发器网络。
68.图4a和图4b示出了其中网络用户是100个1类suas用户的示例性网络场景。
69.图5a和图5b示出了在图4a和图4b中所示的网络场景中每条链路的接收入射功率(rip),该接收入射功率是根据每个接收器的视场(fov)中的信标发射器的到达时间(toa)和到达频率(foa)而确定的。
70.图6a和图6b示出了在图4中所示的网络场景中每条链路的观测到的sinr,该sinr是根据在代表性的信标接收器上观测到的信标toa和信标foa而确定的。
71.图7和图8示出了用于生成和传输信标的操作。
72.图9示出了传输的信标的多个方面。
73.图10a至图10d示出了根据本发明的一个方面生成的两个信标的频率响应和时间响应。
74.图11示出了在本发明的一个方面中使用的用户接收器系统概念。
75.图12示出了在“冷启动”场景中使用的示例性接收和pnt处理操作,其中接收器不知道其位置或对信标传输的精确定时和载波同步。
76.图13示出了本发明的各个方面采用的数据信道化操作。
77.图14示出了根据本发明的一些方面开发的示例性信道化器窗口的频率响应。
78.图15示出了一种高效的弹性toa-foa表面生成过程。
79.图16a、图16b和图17a、图17b示出了针对本发明的两个方面获得的toa-foa表面。
80.图18、图19和图20示出了在本发明的一个方面中使用的基于地理可观测量的定位/定时操作。
81.图21a至图21c示出了用于示例性接收场景的联合地理定位和同步过程。
82.图22a至图22c和图23a至图23c示出了针对两个示例性接收场景中的所有网络用户的方法的性能。
具体实施方式
83.下面结合附图阐述的详细描述旨在作为对各种配置的描述,而非旨在表示可以实
践本文描述的概念的配置。详细描述包括用于提供对各种概念的透彻理解的具体细节。然而,对于本领域的技术人员来说显而易见的是,可以在没有这些具体细节的情况下实践这些概念。在某些情况下,众所周知的结构和部件以框图形式示出,以避免混淆这些概念。
84.示例性弹性分布式定位网络
85.图1示出了可以使用本文介绍的系统进行实例化的弹性分布式发射器网络(rdtn)。在该网络中,信标是从l个网络节点401构成的网络在已知的频率信道上发送的。示例性网络节点401包括与蜂窝传输塔或802.11接入点共同定位的固定室外发射器、与802.11wlan或802.15蓝牙或zigbee网络共存的室内发射器、或独立的发射器。网络节点401连接到网络运营中心(noc)403,例如5gnr多接入边缘计算机(mec)或uas服务供应商(uss),该网络运营中心在安全通信链路上为这些网络节点401中的每一个提供单独的配置数据或时间符号。在替代实例中,网络节点401选择它们自己的配置并通知noc 403所选择的站点。发送的信标被m个用户400(例如,如图1所示的1类suas用户、地面车辆、蜂窝用户设备(user equipment,ue)、802.11sta、802.15zigbee设备或蓝牙设备、或物联网设备等)接收,每个用户对数据的快照进行收集,该数据包含在网络节点401的视场(fov)内来自该网络节点的信标传输的叠加。在一个方面中,用户400通过连接到用户400和noc 403的至少一个无线通信收发器402(例如蜂窝lte、4g或5g网络或802.11无线局域网(wlan))将这些快照回传到noc 403。在替代的方面中,用户400可以使用通过无线通信收发器402提供的网络节点401位置和配置数据自己执行定位和定时操作,并通过无线通信收发器402将这些操作的结果发送到noc 403。在一些方面中,具有不同能力和网络许可(包括随时间变化的能力和许可)的不同用户400可以实现一个方面或另一个方面。
86.图2示出了可以使用本文介绍的系统进行实例化的替代性弹性分布式接收器网络(rdrn)。在该网络中,基于从noc 403通过无线通信收发器402发送到用户400的信标配置数据,从用户400发送信标。可以在连续的基础上或在用户400发起的基础上(例如,在检测到pnt中断条件后,或根据noc 403的请求)发送快照。然后快照在网络节点401处被接收,并从网络节点401被回传到noc 403。
87.图3示出了也可以使用本文介绍的系统进行实例化的替代性的弹性分布式收发器网络(rdxn)。在该网络中,使用由noc 403提供的信标时间符号或配置数据从网络用户401发送信标,并且根据用户400或noc 403的需要接收信标以及从用户400直接转发信标。
88.示例性1类suas部署场景
89.图4a和图4b示出了两种示例性的弹性分布式定位网络部署场景,一种用于运行在位于904-906mhz(图4a)的定位与监控服务(lms)频带的子频带a中,本文中称为“lms场景”,另一种用于运行在位于2,462-2,482mhz(图4b)的802.11 2.4ghz信道13中,本文中称为“2.4ghz信道13场景”,该信道13是2.4-2.485ism频带中的20mhz的信道,在美国不用于802.11传输。在每种场景中,100名用户被部署在3至122米(10-400英尺)的海拔(agl)高度并且在距离区域分析中心32.2公里(20英里)的范围内,并且具有22.3至44.7米/秒(50-100英里/小时)的空速,符合1类suas。假设球形地球模型具有4/3的折射率,用户400具有45.5公里(28.3英里)的地平面最大高度。在图4a中,用户400在32个固定网络节点401的fov中被部署在15.2到45.7(50-150英尺)的海拔agl高度,即具有27.9公里(17.3英里)的地平面最大高度,并且在17,227平方公里的区域内被布置成与来自手机信号塔的稀疏部署一致的大
致呈六边形的布局。在图4b中,用户400在50个固定网络节点401的fov中被部署在相同的高度范围内,并且被部署在16,480平方公里的区域内。两种布局在用户400和网络节点401高度的范围内都覆盖了用户400的完整的fov,允许lms场景中的1,382条链路,或者允许每个用户400有4到25条链路;以及允许2.4ghz信道13场景中的2,517条链路,或者允许每个用户400有5到41条链路。
90.图5a和图5b示出了用于lms场景(图5a)和2.4ghz信道13场景(图5b)的信标的、在每个接收器处的接收入射功率(rip),该接收入射功率根据这些接收到的信标的到达时间(toa)和到达频率(foa)(即多普勒频移)而定。在每种场景中,假设信标具有方位角全向天线,该天线在0
°
仰角时增益为6dbi,在
±
30
°
仰角以上时增益为-3dbi。在lms场景中,信标以40.9dbm的功率被传输,产生30瓦的erp,这是在该频段中所允许的最大功率。在2.4ghz信道13场景中,信标以30dbm的功率被传输,产生36dbm的eirp,这是在2.4-2.485ghz ism频段中所允许的最大fcc part 15兼容功率。每条链路假定具有两射线中值路径损耗,每条链路上具有4db rms对数正态阴影和(20db平均值,4db标准偏差)rician衰落。
91.如这些图所示,在lms场景中,链路toa被限制为3到229μs,在2.4ghz信道13场景中被限制在4到232μs之间,远低于对从meo传输的gnss信号预期的67到94毫秒的toa范围。类似地,在lms场景中,链路foa的范围被限制为
±
135hz,在2.4ghz信道13场景中被限制为
±
369hz,远低于对从meo传输的l频段gnss信号预期的
±
6khz的foa范围。对于两种场景而言,这是rdpn的可利用的特性。同时,在lms场景中,信标的rip的范围为-88dbm到-40dbm,在2.4ghz信道13场景中范围为-105dbm到-64dbm,比在地球表面的-130dbm gps l1信号标称强度强得多。虽然这对于任何基于信标的定位解决方案来说也是一个明显的优势,但它也表明信标可能会以正snr被接收并且具有显著的远近干扰。也就是说,尽管信标的接收snr很高,但将接收到的信号与发送的信标的副本相关联的传统“匹配滤波器”接收器的性能将受到观测到的与每个信标有关的干扰的限制,这是由于这些接收到的信标之间的自干扰所致。
92.该观测结果在图6a和图6b中得到证实,对于lms场景(图6a)和2.4ghz信道13场景(图6b),图6a和图6b示出了在图5a和图5b中所示的每条链路的观测到的toa、foa和sinr。在这两种情况下,信标发射器假设采用方位角全向天线,该天线在0
°
仰角时增益为6dbi,在
±
30
°
仰角以上时增益为-3dbi,而接收器通过接收器的模数转换器(adc)具有6db的累积噪声系数(noise figure,nf),并且假设adc和下变频本地振荡器(lo)分别锁定到具有
±
10ppm 90%速率和
±
100μs定时偏移的时钟。在该场景中,假设信标发射器具有可忽略的定时偏移和lo偏移,即,信标发射器使用经gps训练的振荡器,或者信标发射器通过校准过程与utc同步。
93.如这些图所示,在lms场景中,adc输出sinr的范围介于-46db到 25db之间,在2.4ghz信道13场景中介于-39db到 8db之间。事实上,虽然在lms场景中所有链路都高于0db的snr,但只有3.5%的链路高于0db的sinr,不到18%的链路高于-10db的sinr。类似地,在2.4ghz信道13场景中,82%的链路高于0db的snr,但只有1.2%的链路高于0db的sinr,10%的链路高于-10db的sinr。因此,接收到的信标显然处于干扰受限的环境中。这就是竞争系统在其信标发射器中引入跳时和时隙化的原因——为了避免这种干扰。
94.这些结果促进了信标的使用,这些信标既可以利用在地面到低空接收几何结构中
获得的紧密得多的toa范围和foa范围,又允许使用可以分离接收到的信标的干扰消除方法,接收到的信标的性能由它们的(高)接收snr决定,而非它们的(低)接收sinr。
95.信标生成和传输系统
96.图7示出了用于为图1和图3所示的网络,以及为其中对网络节点401提供来自noc 403的信标时间符号的方面生成信标时间符号的操作。时间符号生成器首先为每个网络节点401选择代码索引101并创建内码索引和外码索引101其中代码索引101指向分别包含内码矢量和外码矢量的代码库102,并且其中为以弧度为单位的相位值的ki×
1矢量。可以确定性地、伪随机地或不可预测地选择代码索引101,或者基于由网络确定的环境因素,例如恶意行为者的欺骗证据来选择代码索引。
97.在一个方面中,包含在代码库102中的相位矢量被设计成产生具有低峰值平均功率比(papr)和与其它的库码本信号之间具有低互相关的库码本信号代码库102也可以被设计成满足其它的系统要求。
98.然后,时间符号生成器执行内部子载波构造操作103以生成k0×
1内部子载波矢量104以及执行外部子载波构造操作105以生成k1×
1外部子载波矢量106在一个方面中,使用简单的相位调制操作来生成矢量,从而得到和和其中,其它的方面将非均匀幅度加权应用于矢量之一或两个矢量,例如以进一步降低所发射的信标的papr、减小由信标传输频带的选定部分中的信标对非信标网络造成的干扰、或降低在运行于信标传输频带中的网络接收器处的对非信标干扰的易感性。
99.然后,将内部子载波矢量104和外部子载波矢量106进行组合107以形成k
sub
×
1全子载波矢量108在一个方面中,使用kronecker乘积运算来执行该组合,从而得到在其它方面中,这可能是更复杂的组合运算,例如,为了提高在发射器或接收器处对lo频率不确定性的鲁棒性、减小由信标传输频带的选定部分中的信标对非信标网络造成的干扰、或降低在运行于信标传输频带中的网络接收器处的对非信标干扰的易感性。
100.然后,对全子载波矢量108进行可选的子载波预加重106操作以生成经预加重的子载波矢量其中“。”表示逐元素(shur或hadamard)地进行乘积运算,并且g
t
(l)为k
sub
×
1预加重矢量110,该预加重矢量补偿在网络节点401l处执行的前端数模转换(digital-to-analog conversion,dac)、抗混叠低通滤波(lowpass filtering,lpf)和上变频操作。可以通过下述方式来设计预加重矢量110:使用用于信标传输操作213的分析模型、或使用在每个网络节点401处获得的校准数据(例如,如在g.pattabiraman、s.melyappan、a.raghupathy、h.sankar于2012年3月被授予的第8,130,141号美国专利“广
域定位系统”中所描述的),并且可以基于信标传输操作213的幅度或复数值来设计该预加重矢量。
101.然后,经预加重的子载波被传递到将子载波变换到时域的多音调制器111,并且可选地被量化112,以便提供n
dac
×
1时间符号矢量113可以使用离散傅立叶变换(discrete fourier transform,dft)、逆dft(idft)、快速傅里叶变换(fast fourier transform,fft)或逆fft(ifft)操作的组合、或者使用多相滤波或离散滤波器组操作来实现多音调制器111。
102.然后,通过信标通信总线114将每个时间符号矢量113从noc 403传递到信标发射器。支持信标通信总线114的示例性通信网络可以包括基于以太网的网络、光网络、电力线通信(power-line communication,plc)网络、802.11wlan、802.15zigbee或蓝牙网络、或3g、4g lte或5g蜂窝网络。在图1和图3所示的包括本发明的这个方面的网络中,信标通信总线114将noc 403连接到网络节点401。在图2所示的网络中,信标通信总线114通过无线通信收发器402将noc 403连接到用户400。
103.图8示出了在本发明的这个方面中在每个信标发射器(例如,用于图1和图3中所示的网络的网络节点401,或用于图2所示的网络的用户400)处执行的操作。在每个信标发射器处,首先从信标通信总线114获得n
dac
×
1时间符号矢量113。如果k
sub
为偶数,则对时间符号矢量113执行时间符号扩展操作211,以将n
dac
×
1时间符号矢量113转换为以下2n
dac
×
1时间符号矢量113
[0104][0105]
并且将该时间符号矢量置于本地存储器212中。对于图1和图3中所示的网络,本地存储器212中的时间符号矢量113被连续地和重复地循环进行信标传输操作213,直到noc 403提供新的时间符号,或者noc 403必须出于其它原因停止传输,例如以遵守为时分双工(time-division-duplex,tdd)操作保留的频谱许可规定或者基于从noc 403接收的其它指令。对于图2中所示的网络,时间符号矢量113在变化的时间间隔持续时间上被从用户400发送,这取决于例如用户400或noc 403所要求的定位/定时解决方案的优先级,或者取决于用户400的节能需要。
[0106]
用于执行信标传输操作213的操作类似于任意波形发生器(arbitrary waveform generator,awg)。在图8所示的方面中,操作包括双dac、双lpf、使用同相和正交lo的频移操作以及功率放大(power amplification,pa)操作。然而,可以使用许多其它手段来实现信标传输操作213,例如,将时间符号矢量113转换为实中频(实intermediate-frequency,if)形式并在多个步骤中执行频率转换的超外差发射器,以及极性调制器,例如d.kirkpatrick、e.mccune,jr于2016年7月被授予的第9,397,713号美国专利“使用乘积模式进行极性调制”,该极性调制器将时间符号矢量113转换为极坐标形式并分别对时间符号矢量113的相位进行相位调制以及对时间符号矢量113的幅度进行幅度调制。这些转换可以在noc 403或信标发射器处实现。
[0107]
通常,在信标传输操作213中采用的dac和lo被锁定到系统时钟214,该系统时钟通
常具有从公共时间标准(例如utc)偏移的时钟速率和定时。如图8所示,与图1和图3中所示的网络一致地,用于网络节点401l的系统时钟214以速率偏移量ε
t
(l)和定时偏移量从utc偏移,其中,为在utc时刻的内部时钟时刻。在一些方面中,使用例如为gnss接收器(rx)215的外部源来将系统时钟214与外部时间和频率标准同步。在一些方面中,使用在noc 403处计算的网络校准方法并例如通过对系统时钟214提供时钟同步数据215(例如定时偏移估计和速率偏移估计来将系统时钟214带入公共时间标准。在图2所示的网络中,类似地,可以使用由noc 403提供的时钟同步数据215来使每个用户400所使用的系统时钟214与公共时间标准同步。
[0108]
在与如图1和图3所示的网络一致的一些方面中,网络节点401配备有代码库101,并且noc 403将要使用的代码索引101发送给该代码库以便生成时间符号矢量113。或者,每个网络节点401可以选择它自己的代码索引101并将该代码索引传送回到noc 403。这些方面通过要求信标拥有代码库102的副本,大大降低了网络节点401与noc 403之间进行通信所需的数据速率,但增加了网络的操作安全性。
[0109]
图9示出了本文中假设的示例性子载波频率布局,并且示出了在使用kronecker乘积运算以便根据简单的bpsk内部子载波矢量102和bpsk外部子载波矢量103构造全子载波矢量108的方面中施加的频谱冗余(图9a);并且示出了用于下述方面的信标的时间结构:在该方面中,时间符号被组织成时隙,其中每个时隙具有n
rep
个时间符号(图9b)。在图9a中,内部子载波矢量103是5要素矢量[ 1 1
ꢀ‑1ꢀ‑
1 1]
t
,而外部子载波矢量106是4要素矢量[ 1
ꢀ‑1ꢀ‑
1 1]
t
。于是,内部子载波与外部子载波组合操作107产生具有20个要素的全子载波矢量108,其中5相位的内部子载波矢量103被复制在4个簇上,每个簇由外部子载波矢量106的一个要素调制。在信标传输操作213中,由多音调制器107产生的信标l在pa输入端处则具有复基带表达式
[0110][0111]
其中子载波频率为
[0112][0113]
并且其中f
sym
=1/t
sym
为子载波间隔。假设这里所示的内部子载波结构,则其中
[0114][0115]
并且其中,内部子载波频率f0(k0)和外部子载波频率f1(k1)分别为
[0116][0117][0118]
从而得到k
sub
=k0k1,f(k0k1 k0)=f0(k0) f1(k1)以及)以及
[0119]
该信标可被解释为堆叠载波扩频(scss)信号,其中通过具有带宽k
subfsym
和周期的宽带信号对具有带宽k0f
sym
和周期的窄带信号进行扩频。所得到的信标具有在簇之间的(在k1个独立的簇上复制内码)以及簇内的(在每个簇内的k0个子载波上复制外码)大的频谱冗余。
[0120]
图9b进一步示出了在每个符号重复上的信标中的附加时间冗余。如果时间符号具有偶数个子载波,则与lte sc-fdma上行链路信号类似地,子载波将以因数f
sym
/2从频率原点偏移。在这种情况下,需要反转连续的时间符号重复以保留每个子载波内的信号能量。如果时间符号具有奇数个子载波,则与lte ofdm下行链路信号类似地,去除该偏移,并且不需要进行这种连续的反转。在任何一种情况下,复制都会产生时间冗余。
[0121]
示例性1类suas兼容的信标生成和传输参数
[0122]
表1列出了示例性的信标生成和传输参数,该信标生成和传输参数与预期用于1类suas以及用于图4中所示的网络几何结构的toa和foa范围兼容。提供与1类suas的兼容性的关键参数是250μs的符号持续时间t
sym
,该符号持续时间涵盖了图5中所示的toa的全部范围,并由对1类suas允许的最大高度驱动。得到的4khz子载波频率分离也与图5中所示的foa的范围兼容,并由对1类suas允许的最大空速驱动。在每种情况下,信标带宽适合于对每个频带进行信道分配。为2.4ghz信道13场景选择的80要素维度内部子载波矢量104使得能够使用线性代数信号分离方法分离多达80个同信道信标。为lms场景选择的24要素维度内部子载波矢量104(主要由该子频带中窄得多的2mhz带宽限制驱动)仅使得能够使用线性代数方法分离多达24个同信道信标,因此可以部署一组更稀疏的同频道信标。较窄的带宽和较稀疏的部署会降低该网络的地理定位能力。然而,更高的发射功率要求弥补了大部分的性能损失。应该注意的是,在这种情况下,相关技术将受到强烈的干扰限制,并且可能无法利用该子频带中可用的任何功率优势。
[0123]
表1:示例性1类suas兼容信标传输参数
[0124]
[0125][0126]
假设量化器108的输出端处的每个同相轨(i)和正交轨(q)有12位,则单个时间符号矢量113需要在用于lms场景的信标通信总线114上传输2,880字节(2.8125kb),在用于2.4ghz信道13场景的信标通信总线上传输28.125kb。假设时间符号矢量113每秒更新一次,noc 403需要信标通信总线114支持用于lms场景的23.04kbps链路和用于2.4ghz信道13场景的230.4kbps链路。这些速率在低成本网络中是可以实现的。
[0127]
图10a到图10d示出了两个具有与表1一致的参数的2.4ghz信道13信标的频率响应和时间响应。图10a示出了19.2mhz信号通带上的平坦信标频率响应,其中边带可忽略不计。图10b示出了信标的近距离频谱分布(本质上是具有4khz线间隔和平坦线功率的线谱)并且示出了信号内的320khz簇的布局。图10c和图10d示出了信标的瞬时功率,并展示了经优化的代码相位对发射信号的影响,这是本发明的特征之一。在图10c中,使用具有均匀随机相位分布的内部子载波矢量104代码相位和外部子载波矢量106代码相位来生成信标。该信标的papr为11.2db,与带限复高斯波形一致。在图10d中,使用取自1,000个成员代码库102的80要素的内部子载波矢量104代码相位和60要素的外部子载波矢量106代码相位来生成另一个信标,在该成员代码库中,相位被优化以使它们的基础时间序列的峰度最小化。该信标的papr为3.15db。
[0128]
示例性信标接收系统
[0129]
图11示出了在本发明的一个方面中使用的接收器系统。当被指示(例如,基于来自noc 403通过无线通信收发器402的提示,或在经调度的快照收集时间)收集快照时,接收器系统执行接收操作300以生成覆盖信标传输频带的下变频和采样数据流。图11中所示的接收操作可以包括可选的带通滤波(bandpass filtering,bpf),随后是低噪声放大(low-noise amplification,lna)、同相和正交(iq)下变频到复基带(被表示为lna输出信号乘以复lo输出信号)、双低通滤波(lpf)和双模数转换(adc)操作,从而产生复杂的iq采样接收数据流。然而,接收操作300可以以许多其他方式实现,包括将信标传输频带下变频为实if表示的两级超外差接收操作300、对包含信标传输频带的更大的频带进行下变频的混合模数接收操作300、以及实施数字下降接收器以生成以信标传输频带为中心的带宽减少的抽取信号。
[0130]
当在经调度的时间间隔需要时,或者通过无线通信收发器402从noc 403给出提示时,接收器系统则执行数据快照收集301操作,该操作生成快照302,该快照包括通过在接收
时间以及在快照302持续时间(在图11中被示出为时间中心)进行接收操作300提供的数据,并且持续时间tr也作为时间戳被包含在该快照302中。在设有时隙的信标格式的方面中,分别具有持续时间t
prefix
和t
suffix
的前缀和后缀也被收集作为快照302的一部分,以便包含由信标发射器与信标接收器之间的定时偏移引入的时隙间干扰。然后通过快照通信总线304将快照302发送到位置/定时(p/t)解决方案生成器303。在图1所示的网络中,快照通信总线304可以通过无线通信收发器402连接到noc 403,或者该快照通信总线可以连接到用户400机载的p/t解决方案生成器303。在图2和图3所示的网络中,快照通信总线304通过类似于支持信标通信总线114的链路的链路连接到noc 403。然而,快照通信总线304通常需要比信标通信总线114更高速率的链路。
[0131]
通常,接收操作300中使用的接收器lo(s)和adc采样器被锁定到具有速率偏移εr和定时偏移的系统时钟214,该速率偏移和定时偏移对每个接收器而言都是唯一的,其中为在utc时间时的接收器时间估计。
[0132]
在本发明的一些方面中,noc 403还提供同步数据216,该同步数据可用于使接收器系统时钟214同步以用于随后的设有时间戳的快照302。在其他的方面中,接收器通过无线通信收发器402从noc 403获得粗同步信息。在本发明的另外方面中,接收器在快照收集301之前执行粗同步操作以确定信标的近似中心频率和(对于设有时隙的信标格式)时隙渡越时间。然后可以使用粗频率信息和粗定时信息来调整adc输出信号的定时载波偏移,或调整驱动lo和adc的接收器时钟;或者,该粗频率信息和粗定时信息可以简单地与设有时间戳的快照302一起被传送到noc 403。在最后一种情况下,频率偏移和定时偏移被包括在设有时间戳的快照302中,以供p/t解决方案生成器303使用。接收器可以将数据以流的方式传输到p/t解决方案生成器303(其可以是远程的或在接收器平台本身上),或者可以例如在开始处理时或根据noc 403的要求/请求而稀疏地捕获频率与定时对齐的数据的设有时间戳的快照302。
[0133]
冷启动接收和弹性的地理可观测量估计操作
[0134]
图12示出了示例性冷启动操作,该示例性冷启动操作在p/t解决方案生成器303处使用,以便弹性地检测和估计被包含在各个接收到的快照302内的同信道信标的地理可观测量,该示例性冷启动操作适用于图1所示的网络。首先对快照302进行处理以估计在图15中描述的foa形心612,即在经下变频的快照303中观测到的信标foa的中心,该形心大致以接收操作300中的目标lo与实际lo之间的误差发生偏移。估计形心可以通过多种方式来实现;例如,使用频谱分析工具以确定接收到的信标频谱的中心,或者例如通过检测和估计信号频谱的上沿和下沿以利用信标信号的近似矩形的形状。该步骤的主要目标是将foa形心612确定在子载波的一小部分内,例如,对于表1中给出的信标传输参数,将形心确定在
±
500hz(
±
1/8子载波)内。在具有设有时隙的信标格式的一些方面中,例如通过执行跨时隙时间相关操作以检测时隙转换来可选地对快照303进行分析以估计出定时偏移估计
[0135]
然后对快照303进行频移以去除估计出的foa形心612,并且如果需要,对快照进行时移以去除估计出的定时偏移,并且将该快照信道化为覆盖生效的快照带宽和持续时间502的子载波和时间符号,创建在图13中描述的经信道化的快照553,通过子载波和时间符
号对该经信道化的快照进行限定。然后将经信道化的快照553堆叠成n
data
×mdof
加窗数据矩阵601,如图15所示,其中m
dof
是数据矩阵的自由度(degrees-of-freedom,dof),n
data
是矩阵中数据样本的数量,并且其中信标在dof维度上是冗余的;以及例如使用qr分解(qr decomposition,qrd)操作503在dof维度上进行白化,从而创建如图15中描述的经白化的快照矩阵604。在一些方面中,foa杂波和foa形心计算操作504被执行以生成如图15中描述的foa杂波谱610,该杂波谱用于改善对接收信标的检测,并且可选地用于改善对foa形心612的估计。在这种情况下,经改善的foa形心612估计也可以被用于重新生成505经信道化的快照553和经白化的快照矩阵604。
[0136]
然后,对经白化的快照矩阵604进行fft/ifft机械化弹性最小二乘(least-squares,ls)搜索操作507,以便:形成如图15中描述的提供根据候选的toa和foa值而定的检测统计的最小二乘(ls)toa-foa表面613;使用在图7所示的信标时间符号生成操作期间被应用的已知数据维度代码506来搜索ls toa-foa表面613,以便对经白化的快照矩阵604中的每个信标进行检测;确定观测到的toa和foa,以及检测到的信标的ls sinr(估计质量)。然后,例如使用对表面峰值的多项式拟合或在检测到的toa-foa表面峰值附近进行的参数搜索操作来对最大化toa和foa以及最大ls sinr进行改善508。可选地,复制辅助的参数估计方法510被用于使用在信标生成操作期间应用的已知dof维度代码506来进一步细化toa和foa地理可观测量以及解决检测器模糊度510。在一些方面中,复制辅助的参数估计方法510的结果用于进一步改善对foa形心612的估计,以及可选地改善对定时偏移的估计,并且使用经改善的foa形心612和可选的定时偏移估计来重新生成505经信道化的快照553,以便进一步改善地理可观测量估计。
[0137]
dof和数据维度以及数据维度代码506和dof维度代码509是基于在fft/ifft机械化弹性最小二乘(ls)搜索操作507中利用的冗余的特定形式而设置的,如通过在数据堆叠和白化操作503中执行的堆叠操作所确定的那样。例如,在其中经信道化的快照被堆叠在内码维度上的一个方面中,数据维度n
data
=k1n
sym
,数据维度码506为k1×
1外子载波矢量106相位而dof维度m
dof
=k0并且dof维度码509为k0×
1内子载波矢量104相位在其中经信道化的快照被堆叠在外码维度上的第二方面中,,数据维度n
data
=k0n
sym
,数据维度码506为k0×
1内子载波矢量104相位而dof维度m
dof
=k1并且dof维度码509为k1×
1外子载波矢量106相位
[0138]
该过程的关键部分将在接下来的小节中更详细地描述。
[0139]
信道化操作
[0140]
图13示出了示例性操作,该示例性操作用于实现foa形心612和一个方面中的可选的定时估计去除以及信道化操作502。系统首先执行foa形心和可选的定时偏移移除操作550,以便从快照303中移除估计的foa形心612和可选的估计定时偏移在具有设有时隙的信标格式的一些方面中,在foa形心和可选的定时偏移去除操作550之前,前缀和后缀也被丢弃。于是,快照303具有持续时间tr=n
rep
t
sym
=nrt
adc
,其中n
rep
和nr是整数,并且t
adc
=1/f
adc
是接收器的参考帧中的adc采样周期。
[0141]
然后使用稀疏的、重叠的、可选地频率偏移的、加窗的dft来将快照303分解成频率子载波和时间符号551,该dft具有重叠时间t
sym
=n
adc
t
adc
、稀疏因子q
sym
、dft长度n
dft
=q
symnadc
和信道器窗口并且如果k
sub
为偶数,还具有频率偏移因子f
sym
/2。然后选择对应于生效的信标子载波频率的dft输出仓,并且对这些输出仓施加快照均衡器操作552。这些操作生成经信道化的快照553x
sub
(k
sub
,n
sym
),表示为
[0142][0143][0144]
其中n
sym
=n
rep-q
sym
1为经信道化的快照中的时间符号数,而为接收器的参考域中的符号n
sym dft时间中心,并且其中为快照信道器均衡器552权重,该权重去除了至少由载波操作552引起的影响并且可选地去除了接收操作300的过滤影响。优选地,快照均衡器552权重为
[0145][0146]
其中hr(f)是接收操作300的聚合频率响应,并且其中去除了foa形心612去除操作502的弥散效应,
[0147][0148]
聚合频率响应项是可选的,并且可以基于接收操作300的建模;或者是从由接收器或网络执行的校准操作中得出的(例如,如pattabiraman 2012中所述的),并且可以基于接收操作300的幅度或复数值。
[0149]
表2列出了与表1中所示的信标生成和传输参数兼容的接收器和信道化器参数。接收器假定对于lms场景采用每秒384万个样本(msps)的双adc采样率,而对于2.4ghz信道13场景采用的采样率为30.72msps,该接收器具有足够的抗混叠滤波以分别提供2mhz和20mhz的受保护的双向通带,该双向通带针对lo不确定性分别用
±
40khz和
±
400khz的保护频带来覆盖信标的有效带宽。在这两种场景下,都假设了具有四倍稀疏度(q
sym
=4)的混合基数dft,并且连续的dft之间的间隔为250μs。该表进一步假设对于两种场景,10毫秒的快照包含16个符号重复,其中13个用于随后的地理可观测量估计操作。
[0150]
表2:示例性接收器、信道化器参数
[0151]
参数lms场景2.4ghz信道13场景sf
lpf
2.84(1mhz通带)2.072(10mhz通带)f
adc
3.84msps30.72msps
wr2mhz20mhzw
guard
40khz400khzt
sym
250μs(n
adc
=960)250μs(n
adc
=9,600)q
sym
4(480个子载波)4(4,800个子载波)n
sym
13(16次重复)13(重复)tr10ms(nr=38,400)10ms(nr=307,200)快照大小112.5kb900kb
[0152]
假设每个i轨和q轨的双adc精度为12位,与低成本接收器前端一致,对于lms场景每个快照的大小为112.5kb,对于2.4ghz信道13场景每个快照的大小为900kb。假设每秒收集303一次快照,将adc输出数据回传303到p/t解决方案生成器需要快照通信总线304,该快照通信总线可以支持用于lms场景的0.922mbps单向数据速率和用于2.4ghz信道13场景的7.37mbps单向数据速率,如果p/t解决方案生成器303在noc 403中,这完全在4g蜂窝或802.11wlan标准的能力范围内。通过快照通信总线304将快照302连续地回传到p/t解决方案生成器303将需要高100倍的数据速率,例如,对于两种场景分别为92.2mbps和737mbps,如果p/t解决方案生成器303在用户400上,这易于通过gbps以太网实现。
[0153]
foa形心612与可选的定时估计去除以及信道化操作502可以以多种不同的方式来执行,例如,使用多相滤波方法、以每个子载波频率为中心的离散滤波器组、基数2的和非基数2的快速傅里叶变换(fft)与逆fft方法的混合,等等。
[0154]
图14示出了使用内插parks-mcclellan算法为lms场景开发的示例性dft窗口的频率响应。窗口通带设置为1khz,这对应于在44.7米/秒(100英里/小时)的最大1类suas空速下该频带中预期的
±
136hz foa偏移,该窗口通带在foa形心612去除操作之后具有
±
864hz载波偏移余量。窗口阻带设置为3khz,这足以抑制由于foa偏离接收器中心频率而引起的任何子载波间干扰。如该图所示,窗口在其设计通带内提供3.7db的抑制(在
±
136hz内小得多),在其设计阻带内提供超过58db的抑制。为2.4ghz信道13场景设计的dft窗口具有几乎相同的性能。
[0155]
假设在图1所示的网络中的经同步的信标发射器,使得t
t(e)
(t
utc
)≡t
utc
,并且限定了作为在接收器参考时刻的实际utc时刻(待在定位/定时算法中进行估计),并且进一步假设对短快照302进行收集301,于是被部署在网络节点401 l处的信标发射器与被部署在用户400处的接收器之间的信道链路增益近似为并且在该用户400处接收到的信标的toa和foa近似为
[0156][0157][0158]
其中,和为信标l在时刻的toa和差分toa(dtoa),并且其中,p
t(l)r
(t
utc
)=p
t(l)-pr(t
utc
)为在用户400处
观测到的网络节点401 l的位置,并且为从用户400到网络节点401 l的观测方位线(line-of-bearing,lob)。于是在用户400接收操作300中,在adc采样器处观测到的toa、dtoa和foa为
[0159][0160][0161][0162][0163]
进一步假设用户400接收操作300具有精确均衡,以及在foa形心612与可选的定时估计去除和信道化操作502中使用的信道化器窗口对子载波间干扰具有理想抑制,则经信道化的快照553x
sub
(k
sub
,n
sym
)近似为
[0164][0165][0166]
其中,a
sub
(l)为端对端的信标l信道化器输出增益,
[0167][0168][0169]
并且其中,d
sub
(k
sub
,n
sym
;τ,α;l)是在候选的观测到的toaτ和观测到的foaα处的网络节点401l信标(“信标l”),
[0170][0171]
并且为信道化器窗口的解析离散傅里叶变换。假设在lpf输入端处具有噪声密度n0的加性高斯白噪声(additive white gaussian noise,awgn)和理想lpf均衡,则背景干扰i
sub
(k
sub
,n
sym
)在每个信道化器输出子载波上具有相同的功率并且信标l在每个信道化器输出子载波上具有相同的snr
[0172]
使用(方程式16)到(方程式20)中给出的经信道化的快照553模型,原则上可以通
过将经信道化的快照553x
sub
(k
sub
,n
sym
)与相关联来估计观测到的地理可观测量此外,如果此外,如果则(方程式20)中的第二个弥散项可以忽略,并且可以使用dft和逆dft(idft)方法来有效地机械化这种相关性。然而,在高接收snr下,这种相关性将产生较差的结果,或者将需要高时间带宽乘积n
symksub
来去除同信道信标之间的互相关性。这个问题可以通过利用在发射器处的该信号中施加的频谱冗余或时间冗余,以实现弹性toa-foa估计器来解决。该过程在下文描述。
[0173]
示例性弹性精细最小二乘toa-foa估计器
[0174]
图15示出了采用弹性toa-foa估计的一个方面,本文中称为精细最小二乘法。首先沿其内码维度600堆叠信道化器快照553,生成在k1个外部子载波信道索引k1=0,...,k
1-1和n
sym
时间符号索引n
sym
=0,...,n
sym-1上枚举的k0×
1矢量信号使用(方程式16)到(方程式20),该信号可被建模为
[0175][0176]
其中,分别为经堆叠的k0×
1内码信标信号矢量,
[0177][0178]
并且其中,a0(τ;l)和d1(k1,n
sym
;τ,α;l)分别是在试验toaτ时的k0×
1信标l外码频谱签名和在试验toaτ和foaα时的标量内码信号,
[0179][0180][0181]
并且弥散项δ0(n
sym
;α)和δ1(k1,n
sym
;α)分别为
[0182][0183][0184]
如果则并且s0(k1,n
sym
;l)在
内码维度上是非分散的。相似地,如果则δ1(k1,n
sym
;α)≈1与(方程式23)密切相关。假设awgn背景噪声和理想lpf均衡,则k0×
1背景干扰矢量在每个内部子载波信道上具有渐近自相关矩阵(acm)
[0185]
该模型非常类似于具有m
dof
自由度(dof)的多要素天线阵列,其中m
dof
=k0是堆叠维度或“dof”维度。与阵列类似,它允许在存在来自同信道信标(γ
t(l
′
)r
>>1,其中l
′
≠l)的强干扰的情况下使用众所周知的成熟线性信号分离方法(例如在agee 2000中被称为代码归零的最小二乘(ls)算法)以近似为γ
t(l)r
~(m
dof-l 1)γ
t(l)r
的输出(解扩)sinr检测和分离外码信号。该方法牺牲了一个解扩器dof来消除环境中的每个强信号,并使用解扩器的剩余dof来提高预期信号的输出snr。该方法还承认具有与该输出sinr成比例的精度的超分辨率地理可观测量估计器。
[0186]
然后,将内码堆叠信号形成为k1n
sym
×
k0加窗数据矩阵601其中渐缩的窗口602满足∑w
toa
(k1)=∑w
foa
(n
sym
)=1,并且被进行白化操作603,以便生成经白化的数据矩阵604例如,可以使用由给出的qr分解(qrd){q0,r0}=qrd(x0)来执行白化操作603,其中r0为由给出的上三角矩阵,并且其中chol{
●
}是cholesky因子运算。可以使用本领域普通技术人员已知的多种有效方法来实现qrd,例如改进的gram-schmidt正交化(mgso)。例如奇异值分解的其它白化操作也可用于白化x0。然后,通过下述方式,经白化的数据矩阵604被用于形成展现sinr fls toa-foa表面613通过在每个内部子载波信道上使用dft组605来计算中间k0×
1fls foa矢量606
[0187][0188]
对每个候选foa和数据维度码506、对该表面的外码使用idft组计算k0×
1经白化的fls线性组合器矢量
[0189][0190]
以及计算展现sinr fls toa-foa表面613
[0191][0192]
可选地,fls foa矢量606还产生fls foa杂波谱610
其中
[0193][0194]
该杂波谱可被用于计算fls偏转统计这是在例如由于镜面反射多径而包含多个显著峰值的toa-foa频谱中特别有用的统计数据。在一些方面中,杂波统计也用于例如使用下述公式来改善foa形心612,
[0195][0196]
该公式可被用于重新生成经信道化的快照553。
[0197]
在没有实质性多径的情况下,则toa-foa估计由下式给出
[0198][0199]
并且最大toa-foa表面613值是fls组合器输出信号在估计的toa和foa下的sinr的度量,可选地,通过可选地,通过来估计内部堆叠的频谱签名,其中,c0=r
0-1
。进一步可选地,通过来估计toa误差方差和foa误差方差,其中,
[0200][0201][0202]
并且其中,(方程式34)与(方程式35)中的下限是针对平的渐缩窗口602实现的。此外,背景toa-foa表面613值是的小于的一个因子,其中针对平的渐缩窗口602也实现了下限。由于这个原因,在没有信道多径的情况下推荐使用平的渐缩窗口602,如果例如由于强镜面多径而预期具有多个toa-foa表面613峰值,则推荐使用形状被设置的渐缩窗口602。
[0203]
白化操作603要求x0(k1,n
sym
),m
dof
=k0,的dof基本大于内码堆叠信号矢量的数量,n
data
=k1n
sym
。如果渐缩窗口602是矩形的,则展现sinr度量可被可选地转换为无偏sinr估计
[0204]
[0205]
如果干扰在外码维度上是i.i.d.复高斯干扰,则该无偏sinr估计非常有效。
[0206]
假设均匀foa间距为α(k
foa
)=(k
foa
/k
foa
)f
sym
,则可以使用k0k1=k
sub n
sym
:k
foa
高效dft运算来计算(方程式28)。类似地,假设均匀toa间距τ(n
toa
)=(n
foa
/n
toa
)t
sym
/k0,则可以使用k0k
foa
l k1:m
toa
高效逆dft(idft)运算来计算(方程式29)。这些运算具有高度规则性和可并行性,并且允许使用高效的fpga或通用gpu(gpgpu)计算模块来实现这些运算。
[0207]
在最大化fls toa-foa表面值508附近使用局部搜索方法进一步细化在(方程式33)中给出的fls toa-foa估计和fls sinr。用于实现的简单方法包括对表面峰值的多项式拟合,例如,在最近邻域上使用二维二次拟合来最大化表面网格位置。可选地,可以使用参数搜索操作,该参数搜索操作利用在(方程式25)中给出的d1(k1,n
sym
;τ,α;l)的完全弥散的形式乘以(方程式27)中的δ1(k1,n
sym
;α)。在一个方面中,牛顿递归和高斯-牛顿递归是在下述经符号归一化的toa-foa矢量上定义的
[0208][0209]
定义2
×
1经符号归一化的频率时间矢量
[0210][0211]
以及k1n
sym
×
2经符号归一化的矩阵则递归为
[0212][0213]
y1(l)=q0u
fls
(l),
ꢀꢀ
(方程式41)
[0214][0215][0216][0217][0218]
[0219]
于是,最终的toa和foa为以及并且fls sinr估计为
[0220]
方程式(方程式33)示出了fls toa-foa频谱613分别具有toa模糊度t
sym
/k0和foa模糊度f
sym
。在一些方面中,使用复制辅助参数估计方法510来解决这种模糊度,该方法利用在(方程式24)中给出的模型a0(τ;l)。在一个方面中,复制辅助模糊度解决算法通过以下方程式给出:
[0221][0222][0223][0224][0225][0226]
其中u
fls
(l)由(方程式40)给出,并且其中和分别为包含信标l检测的toa区域和foa图块。于是,完整的toa和foa地理可观测量分别为和如果对于任何检测到的信标则可选地例如使用加权估计则可选地例如使用加权估计来重新计算foa形心612并且使用新的foa形心612估计来重复随后的如图12所示的fls地理可观测量估计操作。
[0227]
复制辅助模糊度估计器还提供复增益估计
[0228][0229]
该复增益估计可被用于计算信标l信道器输出功率和相位偏移。这些参数为信道校准操作提供关键输入,例如,以便为后续的网络校准操作确定发射和接收载波相位以及真实信道路径损耗。
[0230]
表3列出了可用于本文中描述的示例性utm和iiot场景中的fls表面生成参数。自由度足够大,能够针对每个场景将用户fov中的所有信标分开,该自由度大约是多径反射的
两倍。在每种情况下,数据条目的数量都是解扩器dof的足够大的倍数,以产生稳定的qrd和fls估计。
[0231]
表3:示例性fls表面生成参数
[0232]
参数lms场景2.4ghz信道13场景k0(m
dof
)3280k1n
sym
(n
data
)5552,200k
foa
128bins128binsm
toa
32lags128lags
[0233]
表4总结了用于两种场景的信道化和fls表面生成操作的复杂度,假设每个操作包括对一个实数的乘和加,并假设白化操作603是使用通过改进的gram-schmidt正交化(mgso)而实例化的qrd来执行的。在这些操作中,qrd使用了每个场景中总操作的23%以上。复杂度完全在调制解调器dsp设备的能力范围内,即使是对于2.4ghz信道13场景。此外,信道化和dft/idft操作容易在fpga(例如xilinx 7k325t或更高版本的设备)中实现或使用通用gpu(gpgpu)来实现。
[0234]
表4:信道化,fls toa-foa表面生成复杂度
[0235]
操作lms场景2.4ghz信道13场景信道化7.06mops61.9mopsfls白化2.27mops56.8mopsfls表面6.57mops130.2mops总fls15.9mops248.9mops
[0236]
表5总结了用于两种场景的fls表面生成过程的存储器要求。存储器要求假设每个处理阶段的数据精度为64位,并且要求原地qrd操作。信道化操作对每个场景都有大量的存储器需求,并且在任何情况下都不是特别繁重。信道化存储器也完全在调制解调器dsp、fpga(例如xilinx 7k325t或更高版本的设备)、或gpgpu的能力范围内。
[0237]
表5:信道化,fls toa-foa表面生成存储器
[0238]
操作lms场景2.4ghz信道13场景信道化2mb15.54mbfls白化21kb119kbfls表面11kb64kb总fls2.03mb15.72mb
[0239]
图16a、图16b、图17a和图17b分别示出了针对lms场景和2.4ghz信道13场景、以及针对表3中给出的表面实例化参数获得的fls toa-foa表面613。为lms场景选择信标10(来自搜索到的32个信标以及检测到的18个信标中,即在用户1 400的fov中的每个网络节点401),并且为2.4ghz信道13场景选择信标37(来自搜索到的50个信标以及检测到的29个信标中,即在用户1 400的fov中的每个网络节点401),因为它们各自提供了在各自的toa-foa搜索期间检测到的所有信标的中值峰值。
[0240]
图16a在示例性lms场景fls toa-foa表面613的全范围内示出了该表面,使用在(方程式25)中给出的经简化的外码信号模型生成该表面。fls toa-foa表面613还示出了使
用在(方程式47)到(方程式51)中描述的复制辅助toa-foa模糊度解决方法510对toa区域2进行的检测。foa杂波频谱610以及在高于背景杂波14.8db或17.1db的估计sinr下获得的单个toa-foa峰值在整个toa-foa表面613中清晰可见。尽管有18个网络节点401在用户400的fov中,但与任何其它网络节点401相关联的其它峰值均不可见。
[0241]
图16b示出了以图16a所示的完整fls toa-foa表面613的峰值为中心的500
×
500参数局部搜索508的结果,使用由(方程式25)给出的扩展外码信号模型乘以(方程式27)的弥散项来生成该完整fls toa-foa表面。扩展外码信号模型的益处在50.4db的最大峰值中很明显——在完整toa-foa表面613上增加了35.6db,并且高于foa杂波频谱610 52.8db。针对这种情况的toa-foa误差为(7.8ps,-16.7mhz),与针对这种情况的百分之95crb(51.6ps,10.6mhz)相当,表明该方法很好地秉承了预期性能。
[0242]
图17a在示例性2.4ghz信道13场景fls toa-foa表面613的全范围内示出了该表面,使用在(方程式25)中给出的经简化的外码信号模型生成该表面。fls toa-foa表面613还示出了使用在(方程式47)到(方程式51)中描述的复制辅助toa-foa模糊度解决方法510对toa区域59进行的检测。foa杂波频谱610以及在高于背景杂波11.4db或19.4db的估计sinr下获得的单个toa-foa峰值在该表面中清晰可见。尽管有29个网络节点401在用户400的fov中,但其它峰值均不可见。
[0243]
图17b示出了以图17a所示的完整fls toa-foa表面613的峰值为中心的50
×
50参数局部搜索508,使用由(方程式25)给出的扩展外码信号模型乘以(方程式27)的弥散项来生成该完整fls toa-foa表面。扩展外码信号模型的益处在25db的最大峰值中很明显——在完整toa-foa表面613上增加了13.6db,并且高于foa杂波频谱610 33db。针对这种情况的toa-foa误差为(-7.9ps,-16.1mhz),与针对这种情况的百分之95crb(39.6ps,82.2mhz)相当,表明该方法在该场景中也很好地秉承了预期性能。
[0244]
本发明的其它方面采用使用替代堆叠方法的类似操作。这些类似操作包括外码堆叠和符号堆叠,该外码堆叠将x
sub
(k
sub
,n
sym
)转换为k1×
1外码堆叠矢量该符号堆叠将x
sub
(k
sub
,n
sym
)转换为n
sym
×
1符号堆叠矢量每种堆叠操作都具有优点和缺点。内码堆叠得到toa估计即在0到t
sym
/k0之间的范围具有伪信号,但在该范围内具有高精确度。为此,该内码堆叠在本文中被称为精细最小二乘(fls)估计器。反之,外码堆叠产生toa估计即在0到t
sym
之间的全范围具有范围伪信号,但具有为k0粗算部(coarser)的一个因子的精度。该外码堆叠在本文中被称为粗略最小二乘(cls)估计器。两种估计器都提供foa的全范围和精度。符号堆叠估计器提供toa的全范围和精度,但不提供foa估计的估计值。在所有情况下,这些问题都可以使用复制辅助后处理方法508来解决。
[0245]
基于地理可观测量的定位/定时过程
[0246]
图18示出了本文公开的基于地理可观测量的定位和定时过程,该定位和定时过程
至少适用于图1所示的网络,并且描述了每个阶段中使用的通用操作。该过程优化了最大似然(maximum-likelihood,ml)目标函数
[0247][0248]
其中,f
toa
(pr,τr)和f
foa
(pr,vr,αr)分别是仅用于toa的ml估计器和仅用于foa的ml估计器
[0249][0250][0251]
并且其中,λ
t
=f
t
/c是标称空间信号波长,和分别在(方程式34)和(方程式35)中给出。在本文所描述的方面中,假设网络节点401是固定的并且具有已知的位置,使得网络节点401位置p
t(l)
(t
utc
)≡p
t(l)
和速度v
t(l)
(t
utc
)≡0。如果网络节点401的系统时钟214与utc同步,则接收操作300中的用户400系统时钟214和lo偏移分别为和αr=-f
t
εr/(1 εr),这使得能够在已知的接收参考时间和时钟速率偏移εr下根据所观测到的估计量推导出utc时间,并且估计用户400位置和速度所用的方法分别通过和给出。
[0252]
在一些方面中,网络节点401的系统时钟214未与utc完全同步,但例如使用网络校准过程已估计出网络节点401相对于utc的定时偏移和速率偏移在这种情况下,检测到的toa和foa被调整以便补偿这些偏移。在一个方面中,通过在ml估计器进行计算之前设置以下方程式来执行上述调整:
[0253][0254][0255]
应该注意的是,(方程式57)并不精确,因为它没有包括第二项除以1 εr,如(方程式14)所示。然而,这种影响对于具有小于20ppm速率偏移的用户400系统时钟214来说是微小的,并且能够在随后的改进中被去除。
[0256]
估计和提取来自(方程式54)到(方程式55)的τr估计值和αr估计值产生
[0257][0258][0259][0260]
引入中间参数和进一步从(方程式61)提取速度,产生
[0261][0262]
然后,所提取的toa目标函数和foa目标函数可用于通过单独对位置pr进行搜索来找到所有用户400的定位参数和定时参数。
[0263]
一旦已估计出了信标地理可观测量和sinr,并且已经检测到信标或记录了检测失败605,则使用三阶段过程来对suas进行联合地理定位,并根据信标网络确定该suas的定时和载波偏移量。在第一阶段中,使用信标的已知位置以及可选的定时估计值和速率偏移估计值652,在整个网络地理上执行粗略区域搜索651。接下来,在粗略搜索653期间确定的最佳搜索点处执行精细区域搜索。最后,在最终的精细搜索位置654处执行精细高度搜索。
[0264]
图19提供了基于在本发明的一个方面中执行的定位/定时过程方法的地理可观测量的更多细节,该定位/定时程序方法适用于图18所示的每个搜索阶段。首先,例如使用关于搜索中心和地面/高度网格参数701的先验信息来设置700包括地面网格坐标和高度网格
坐标的候选用户400位置坐标。在粗略搜索阶段651中使用的搜索中心是基于例如由于用户400连接到的无线通信收发器402或先前的用户400位置估计而对用户400位置的粗略了解;在后面的精细搜索653和精细高度搜索654阶段中的搜索中心是基于之前的搜索阶段的结果。然后,使用网络节点401位置,并且使用由之前的地理可观测量估计操作703提供的信标检测,基于在地理可观测量估计阶段期间已检测到的信标和在该阶段期间未检测到的信标,将候选用户400的位置坐标修整到可行区域702(下文将更详细地描述)。然后使用在(方程式59)703中给出的仅提取toa的ml目标函数对经修整的候选用户400位置坐标执行初始搜索。在每个候选用户400位置坐标处,使用额外的交替投影算法来解决toa估计中的任何额外的t
amb
因子模糊度,其中,如果使用fls估计器,则t
amb
=t
sym
/k0,并且不执行复制辅助模糊度解决操作510,否则705t
amb
=t
sym
。从初始定时偏移估计开始,示例性方法执行递归
[0265][0266][0267]
直至在每个候选用户400位置坐标处稳定。之后使用来更新toa估计。
[0268]
然后,在某些方面中,从(方程式59)的最小值中找到最佳用户位置。在其它方面中,将(方程式63)中给出的仅关于foa的ml函数添加到仅关于toa的ml函数,并使用经组合的toa-foa ml函数找到或细化最佳位置。可选地,使用例如包括多项式拟合到最优ml函数值方法或参数化高斯-牛顿方法的局部搜索操作708进一步优化最优位置。然后分别根据(方程式62)、(方程式58)和(方程式60)估计709速度偏移和定时偏移以及lo偏移。
[0269]
在某些方面中,“修整”策略用于限制由系统搜索到的实际位置。图20示出了用于执行这种修整的策略,该策略适用于图18所示的搜索策略中的每个阶段。一旦建立700了一组候选用户位置,使用已知的网络节点401位置652计算所有信标与候选用户400位置之间的倾斜范围。于是超视距(over-the-horizon,oth)链路被检测到,并且之后连接到多于与检测到的信标相关联的l
max-duct oth网络节点401的候选用户400位置,或者未连接到多于与检测到的信标相关联的l
max-fail
非oth网络节点的候选用户400位置被从用户位置集移除。这些条件辨别出任何候选位置必须位于与通过toa-foa搜索过程检测到的信标相关联的所有网络节点401的fov内部,除了发生波导的情况;并且候选位置必须位于与未被toa-foa搜索检测到的信标相关联的所有网络节点401的fov的外部,但阻塞、阴影等除外。
[0270]
图21a至图21c示出了在lms场景中用于用户1 400的完整定位搜索过程。系统以非常高的精度确定用户400的水平(xy平面)位置和竖直(z轴)位置,并且位置值与定位crb95相当。特别是z轴性能超过了3米的fcc e911强制要求、4.6米(15英尺)的waas z轴精度目标和1米的5gnr xyz精度目标。“修整”策略的效果在该图中也清晰可见,显示了在搜索过程中的每个阶段,搜索区域的实质性减少。
[0271]
图22a至图22c和图23a至图23c示出了针对两种场景中的所有用户的定位、速度和
定时/lo偏移估计性能,并且表6总结了针对示例性场景的百分之80性能。这两种场景都展示了厘米级的80%水平(xy平面)定位精度和小于3米的80%竖直(z轴)定位精度——满足fcc e911 z轴定位要求。这两种场景还展示了对于所有场景的小于10皮秒的80%时钟定时精度和小于20ppt的80%时钟速率精度,即接近stratum 1(10ppt)的时钟速率精度。
[0272]
表6:两种场景的百分之80定位/定时性能
[0273]
百分之80误差lms场景2.4ghz信道13场景xy位置1.2cm5mmz位置3.5m1.8mxy速度0.82cm/s8.9mm/sz速度1.7m/s1.8m/s时钟定时95ps44ps时钟速率16ppt15pptlo偏移15mhz36mhz
[0274]
本发明的附加方面
[0275]
上述方法以直接的方式扩展到镜面多径环境。由于仓库和企业环境中所预期的高程度的多径,预计该方面在iiot应用场合中也将特别重要。然而,由于来自用户附近的大型建筑物和结构的反射,该方面在城市室外环境中也将很重要。
[0276]
多径扩展包括多径缓解方面以及多径利用方面,在多径缓解方面中,直接路径和反射路径被单独识别并被用于从后续的定位和定时解决方案中排除反射路径,或作为这些解决方案的一部分;在多径利用方面中,直接路径(如果可用)和反射路径被识别并被用于后续的定位和定时解决方案中。本领域普通技术人员可用的多径缓解方面包括:
[0277]
·
多峰表面检测方法,该方法检测和估计每个网络节点401与每个用户400之间的所有实质性传播路径的toa和foa。
[0278]
·
非矩形的toa-foa表面窗口,该窗口改善了直接路径与镜面反射路径之间的分离。本文描述的所有方面都包含这样的窗口。
[0279]
·
健壮的定位/定时解决方案,该解决方案可在后续的定位/定时操作期间在直接路径检测与镜面反射检测之间进行分类,以识别出直接路径检测。多径利用方面包括在hilsenrath 2000和wax 2000中描述的多径指纹方法,这些方法利用了丰富的多径环境中直接反射和镜面反射的大规模结构。
[0280]
本发明的其它方面体现在标题为“使用频谱/时间冗余信标网络的安全、低延迟和高精度、抗干扰的导航和定时”的临时专利申请62/969,264中,其特别通过引用并入本文;以及体现在标题为“弹性分布式定位网络:极低延迟、高精度定位和定时的新方法”的论文中所披露的文字和图、以及同名的演示文稿,其副本附于本文并特别通过引用并入本文;以及体现在标题为“分布式弹性定位网络”的临时专利申请63/138,300中,其副本附于本文并特别通过引用并入本文。
[0281]
本文结合附图阐述的说明描述了示例配置并且不代表可以实施或在权利要求的范围内的所有示例。本文使用的术语“示例性”是指“作为示例、实例或说明”,而不是“优选”或“优于其它示例”。详细描述包括用于提供对所描述技术的理解的具体细节。然而,可以在没有这些具体细节的情况下实施这些技术。在某些情况下,众所周知的结构和设备以框图
形式显示,以避免混淆所描述示例的概念。
[0282]
在附图中,相似的部件或特征可以具有相同的参考标记。此外,可以通过在参考标记后加上破折号和区分相似部件的第二标签来区分相同类型的各种部件。如果说明书中仅使用了第一参考标记,则该描述适用于具有相同第一参考标记的任何一个类似部件,而与第二参考标记无关。
[0283]
可使用多种不同技术和技术中的任何一种来表示本文描述的信息和信号。例如,贯穿以上描述中可能引用的数据、指令、命令、信息、信号、位、符号和芯片可由电压、电流、电磁波、磁场或粒子、光场或粒子或其任意组合表示。
[0284]
结合本文公开描述的各种说明性块和模块可以用被设计成执行本文所描述的功能的通用处理器、数字信号处理器(dsp)、asic、现场可编程门阵列(fpga)或其他可编程逻辑器件、分立门或晶体管逻辑、分立硬件组件或其任何组合来实现或执行。通用处理器可以是微处理器,但在备选方案中,处理器可以是任何常规处理器、控制器、微控制器或状态机。处理器也可以实现为计算设备的组合(例如,dsp和微处理器的组合、多个微处理器、一个或多个微处理器与dsp核结合,或任何其他这样的配置)。
[0285]
本文中描述的功能可以用硬件、处理器执行的软件、固件或它们的任何组合来实现。如果在由处理器执行的软件中实现,则这些功能可以作为一个或多个指令或代码在计算机可读介质上存储或传输。其他示例和实现方式在本发明和所附权利要求的范围内。例如,由于软件的性质,上述功能可以使用由处理器执行的软件、硬件、固件、硬接线或任何这些的组合来实现。实现功能的特征也可以物理地位于不同的位置,包括被分布以使得部分功能在不同的物理位置实现。此外,如本文所用,包括在权利要求中,在项目罗列(例如,以诸如“至少一个”或“一个或多个”之类的短语开头的项目列表)中使用的“或”表示包含性罗列,例如,a、b或c中的至少一个的罗列表示a或b或c或ab或ac或bc或abc(即a和b和c)。
[0286]
计算机可读介质包括非暂态计算机存储介质和通信介质,包括有助于将计算机程序从一个地方转移到另一个地方的任何介质。非暂态存储介质可以是可由通用或专用计算机访问的任何可用介质。作为示例而非限制,非暂态计算机可读介质可包括ram、rom、电可擦可编程只读存储器(eeprom)、光盘(cd)rom或其他光盘存储、磁盘存储或其他磁存储设备或任何其他可用于携带或存储指令或数据结构形式的所需程序代码的、并且可由通用或专用计算机或者通用或专用处理器访问的非暂态介质。此外,任何连接都被恰当地称为计算机可读介质。例如,如果使用同轴电缆、光纤电缆、双绞线、数字用户线(dsl)或红外线、无线电和微波等无线技术从网站、服务器或其他远程源传输软件,那么同轴电缆、光纤电缆、双绞线、数字用户线(dsl)或红外、无线电、微波等无线技术都包含在介质的定义中。如本文所用,磁盘和盘包括cd、激光盘、光盘、数字通用盘(dvd)、软盘和蓝光光盘,其中磁盘通常以磁性方式再现数据,而盘以激光方式以光学方式再现数据。以上的组合也包括在计算机可读介质的范围内。
[0287]
提供本文的描述以使本领域技术人员能够制作或使用本发明。对于本领域技术人员来说,对本发明的各种修改将是显而易见的,并且本文定义的一般原理可以应用于其他变型而不脱离本发明的范围。因此,本发明不限于本文描述的示例和设计,而是应被赋予与本文公开的原理和新颖特征一致的最宽范围。
[0288]
本文公开的所有出版物、专利和专利申请通过引用整体并入。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。