1.本实用新型主要涉及机电控制产品领域,具体是一种机器视觉与教学实践控制装置。
背景技术:
2.目前,如《自动控制原理》、《电机拖动基础》等机电专业基础课程理论完善,但对应的实验设施,一部分如三自由度无人机系统,复杂昂贵,设施底层封装过于严密、不宜进行底层机械电路结构的研究学习,同时导致一旦实验中出现硬件层面错误不容易排查,学生无法从中充分应用已学知识;而另一部分如直流电机系统,系统过于简单,实验学习过程中需要大量的时间进行电路搭建和电路的排错,系统的稳定性差,容易出错,实验成功率低,很容易给初学者带来巨大的精神压力。
3.同时,大部分实验设施占用空间大,不宜搬运转移,随着学习机械控制相关专业的学生数量的增加,间接导致实验室资源紧张、无法充分满足学生实验需求。
4.因此,对于机电专业学生专业,其实践能力无法得到很好的锻炼。
技术实现要素:
5.为解决现有技术的不足,本实用新型提供了一种机器视觉与教学实践控制装置,它能够满足学生的实践需求,使学生得到很好的实践锻炼。
6.本实用新型为实现上述目的,通过以下技术方案实现:
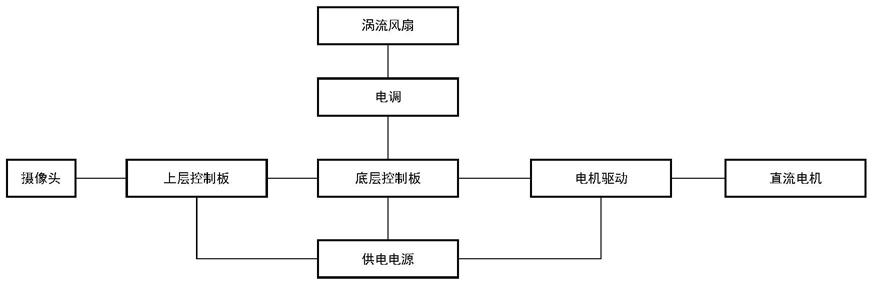
7.一种机器视觉与教学实践控制装置,包括巡航车本体,所述巡航车本体内设置供电电源,所述供电电源一侧设置底层控制板,所述底层控制板为arduino底层控制板,所述底层控制板一侧分别设有电机驱动和上层控制板,所述电机驱动和上层控制板均与底层控制板相连接,所述底层控制板、电机驱动和上层控制板均与供电电源相连接,所述电机驱动上连接有直流电机,所述直流电机上设有驱动轮,所述上层控制板上设有摄像头。
8.所述底层控制板上连接有电调,所述电调上连接有涡流风扇。
9.所述上层控制板为nvidia开发板。
10.所述供电电源为直流电池。
11.所述巡航车本体为亚克力车体。
12.所述驱动轮为麦克纳姆轮。
13.所述摄像头为通用usb摄像头。
14.所述上层控制板上设有若干usb接口。
15.对比现有技术,本实用新型的有益效果是:
16.本实用新型通过巡航车由摄像机获取环境图像信息,上层控制板根据环境色彩图像识别定位火焰源位置,mega分析规范信息并制定控制策略,控制巡航车寻火与灭火。上层控制板处理信息及时,mega控制迅速,自动化程度高,能及时发现火情并灭火,能够进行各种学习实验,使用者能够快速的进行编程的学习和体验,提高学习效率,满足学生的实践需
求,使学生得到很好的控制实践锻炼。
附图说明
17.附图1是本实用新型工作原理图;
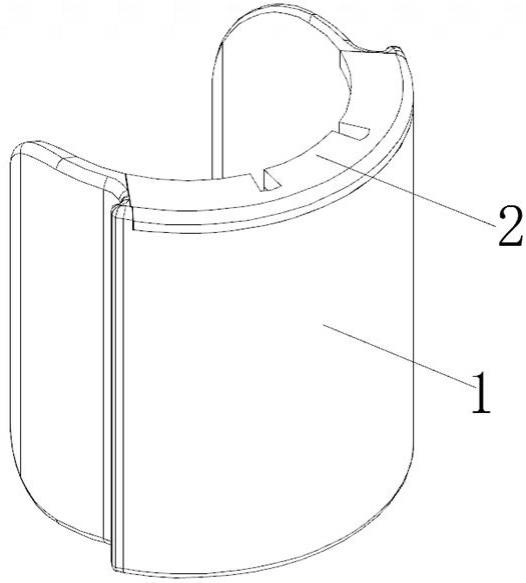
18.附图2是本实用新型主视图结构示意图;
19.附图3是本实用新型俯视图内部结构示意图;
20.附图4是本实用新型上层控制板接口图。
21.附图中所示标号:1、巡航车本体;2、供电电源;3、底层控制板;4、电机驱动;5、上层控制板;6、直流电机;7、驱动轮;8、摄像头;9、涡流风扇;10、usb接口。
具体实施方式
22.结合附图和具体实施例,对本实用新型作进一步说明。应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
23.本实用新型中使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接、粘贴等常规手段,所采用的电路连接均为现有技术中的常规型号,同时,为了清楚地表达各构件之间的连接关系和工作原理,说明书附图采用机构运动的简图的方式进行了整理绘制,在此不再详述。
24.一种机器视觉与教学实践控制装置,包括巡航车本体1,所述巡航车本体1内设置供电电源2,所述供电电源2一侧设置底层控制板3,所述底层控制板3为arduino底层控制板3,arduino作为最流行的创客平台,深受国内外广大创客群体的喜爱,其开源、可进行深度改造,nvidia jetson xavier nx是一款功能强大的人工智能开发板,可以承载图像识别,目标检测等需求复杂网络的人工智能项目。应用到本产品中的巡航车中,能够使学生将相关知识进行应用,得到很好的锻炼。所述底层控制板3一侧分别设有电机驱动4和上层控制板5,所述电机驱动4和上层控制板5均与底层控制板3相连接,所述底层控制板3、电机驱动4和上层控制板5均与供电电源2相连接,所述电机驱动4上连接有直流电机6,所述直流电机6上设有驱动轮7,所述上层控制板5上设有摄像头8。本实用新型通过巡航车由摄像机获取环境图像信息,上层控制板根据环境色彩图像识别定位火焰源位置,mega分析规范信息并制定控制策略,控制巡航车寻火与灭火。上层控制板处理信息及时,mega控制迅速,自动化程度高,能及时发现火情并灭火,能够进行各种学习实验,使用者能够快速的进行编程的学习和体验,提高学习效率,满足学生的实践需求,使学生得到很好的控制实践锻炼。
25.进一步地,所述底层控制板3上连接有电调,所述电调上连接有涡流风扇9,通过电调控制涡流风扇的运行,进一步优化了巡航车的控制。
26.作为优化,所述上层控制板5为nvidia开发板。
27.作为优化,所述供电电源2为直流电池。
28.作为优化,所述巡航车本体1为亚克力车体。
29.作为优化,所述驱动轮7为麦克纳姆轮,可以更灵活方便的实现全方位移动功能
30.作为优化,所述摄像头8为通用usb摄像头8。
31.作为优化,所述上层控制板5上设有若干usb接口10。
32.实施例:
33.一种机器视觉与教学实践控制装置,包括巡航车,巡航车包括车身上的直流电池、arduino底层控制板、车身四周的直流电机和驱动轮,其该装置还包括与所述的arduino底层控制板7通过电调连接的涡流风扇以及电机驱动,用于控制风扇电机与直流电机,车身前侧设有与nvidia上层控制板连接的摄像机10。
34.所述的nvidia上层控制板型号为jetson xavier nx,如图4所示,通过usb端口与摄像头相连,usb端口和arduino底层控制板连接。上层控制板具备一个hdmi端口与4个usb端口,在设备齐全的情况下,通过usb端口可直接连接鼠标键盘,从而实现对上层控制板的学习调试,同时,可直接通过hdmi口与开发板连接显示屏,从开发板获得其反馈信息。
35.所述arduino底层控制板7,型号为arduino mega-r3 2560,用于根据上层控制板发送的串口数据控制风扇11与驱动轮。mega具备多种通信接口,可以和计算机、其他arduino或者其他控制器通信。
36.在本实施中,采用上电开关控制巡航车各个设备的上电,基本供电由直流电源8完成。
37.驱动轮包括4个直径为80mm的麦克纳姆轮,如图2和3所示,包括2个电机驱动,左侧和右侧的两个麦克纳姆轮其直流电机均连接l298n电机驱动,以l298n电机驱动芯片为核心的直流电机驱动模块,额定供电电压12v,其输出电流为2a,最高电流为4a,最高工作电压为50v,保证正常供电与控制,arduino底层控制板7的pwm输出控制直流电机的转速,实现四路直流电机控制,进而控制小车的运动状态。
38.涡流风扇控制方法与电机的控制类似,本实施中,好盈skywalker-20a电调作为30mm航模涵道风扇qf611的驱动模块实现灭火功能。电调的额定供电电压为12v,支持最高为20a的电流。设计将mega上产生的5v电压为电调的供电,从车身电源接线为风扇供电。将mega上的pwm输出连接到电调的使能管脚,从而控制风扇的转速,最终实现定点灭火。
39.本实施例中,基于nvidia开发板和arduino的教学仪器的工作原理为:
40.巡航车自主巡航遍历指定环境,由摄像机获取环境图像信息,传送给上层控制板,上层控制板根据环境色彩图像识别定位火焰源位置,针对图像完成图像分类与物体定位,完成目标检测,并由串口发送规范信息至底层控制板,底层控制板分析规范信息并控制麦克纳姆轮改变转向,实现如直行转弯等不同的运动方式,巡航车由巡航模式转换为寻火模式靠近火焰,以2hz的频率刷新上层控制板的色彩图像数据,同时上层控制板向底层控制板返回火焰位置,直到底层控制板判断火焰中心位置超过设定阈值,控制风扇完成灭火任务。灭火完成后,巡航车进入巡航模式,继续执行巡航任务。本实施例中,通过设计通信接口组,使上层控制板可以与mega通过串口连接,同时也能够连接外部电路或器件,从而结合上层控制板上集成ubuntu16.04系统,控制流程简明、自动化程度高,能够进行各种学习实验,使用者可根据具体功能进行改造、泛化能力强,能够快速的进行编程的学习和体验,提高学习效率,便于机电专业相关学生的实验与学习。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。