技术特征:
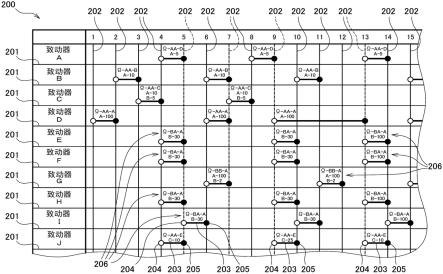
1.一种控制程序生成装置(100a、110),生成具备多个致动器(10~20)的自动制造机械(1)的控制程序,所述控制程序生成装置的特征在于,具备:基本动作存储部(102),其将表示所述致动器的每个自由度的动作的基本动作(206)与实现所述基本动作的程序组件相对应地进行存储;动作图读取部(103),其读取动作图(200),在所述动作图中,将从所述自动制造机械开始动作起至结束动作为止的动作期间分割为多个部分期间,将所述自动制造机械的动作分解为多个所述基本动作,并且将所述基本动作分配于从所述多个部分期间中针对每个所述基本动作选择出的任一个所述部分期间,由此描述有所述自动制造机械的动作;以及控制程序生成部(105),其通过按照所述动作图上的所述部分期间的顺序将所述动作图上的分配于多个所述部分期间的多个所述基本动作的所述程序组件进行结合,来生成用于使所述自动制造机械动作的所述控制程序。2.根据权利要求1所述的控制程序生成装置,其特征在于,所述动作图读取部读取通过在表形式的动作图上在对应的坐标位置记入所述基本动作来描述有所述自动制造机械的动作的所述动作图,在该表形式的动作图中,多个所述部分期间并排地配置于横向及纵向中的任一方,多个所述致动器并排地分配于所述横向及所述纵向中的另一方。3.根据权利要求1或2所述的控制程序生成装置,其特征在于,所述基本动作存储部除了所述基本动作以外,还将计时器的计时动作及计数器的计数动作中的至少一方与实现所述计时动作或所述计数动作的所述程序组件相对应地进行存储,所述动作图读取部能够读取将所述计时动作和所述计数动作中的至少一方分配于所述多个部分期间中的任一个部分期间的所述动作图。4.根据权利要求1至3中的任一项所述的控制程序生成装置,其特征在于,所述基本动作存储部除了所述基本动作以外,还将开关探测动作与实现所述开关探测动作的所述程序组件相对应地进行存储,该开关探测动作通过监视开关的状态来探测开关切换的情况,所述动作图读取部能够读取将所述开关探测动作分配于所述多个部分期间中的任一个部分期间的所述动作图。5.根据权利要求1至4中的任一项所述的控制程序生成装置,其特征在于,所述基本动作存储部除了所述基本动作以外,还将扬声器的声音输出动作及灯的发光动作中的至少一方与用于实现所述声音输出动作或所述发光动作的所述程序组件相对应地进行存储,所述动作图读取部能够读取包含所述声音输出动作和所述发光动作中的至少一方的所述动作图。6.根据权利要求1至5中的任一项所述的控制程序生成装置,其特征在于,所述基本动作存储部除了所述基本动作以外,还将加热器的加热动作与用于实现所述加热动作的所述程序组件相对应地进行存储,所述动作图读取部能够读取包含所述加热动作的所述动作图。7.一种控制程序生成方法,用于通过计算机来生成具备多个致动器(10~20)的自动制
造机械(1)的控制程序,所述控制程序生成方法的特征在于,包括以下工序:动作图读取工序(步骤1),读取动作图(200),在所述动作图中,将从所述自动制造机械开始动作起至结束动作为止的动作期间分割为多个部分期间,将所述自动制造机械的动作分解为表示所述致动器的每个自由度的动作的多个基本动作(206),并且将所述基本动作分配于从所述多个部分期间中针对每个所述基本动作选择出的任一个所述部分期间,由此描述有所述自动制造机械的动作;动作图解析工序(步骤2),通过解析所述动作图,来提取所述动作图中包含的多个所述基本动作以及分配有多个所述基本动作的所述部分期间;以及控制程序生成工序(步骤3),通过参照将所述基本动作与用于实现所述基本动作的程序组件相对应地存储的对应关系,来将所述动作图中记载的所述基本动作变换为所述程序组件,并且通过按照所述部分期间的顺序将所述程序组件进行结合,来生成用于使所述自动制造机械动作的所述控制程序。8.一种程序,用于使用计算机实现用于生成具备多个致动器(10~20)的自动制造机械(1)的控制程序的方法,所述程序使用计算机实现以下功能:动作图读取功能(步骤1),读取动作图(200),在所述动作图中,将从所述自动制造机械开始动作起至结束动作为止的动作期间分割为多个部分期间,将所述自动制造机械的动作分解为表示所述致动器的每个自由度的动作的多个基本动作(206),并且将所述基本动作分配于从所述多个部分期间中针对每个所述基本动作选择出的任一个所述部分期间,由此描述有所述自动制造机械的动作;动作图解析功能(步骤2),通过解析所述动作图,来提取所述动作图中包含的多个所述基本动作以及分配有多个所述基本动作的所述部分期间;以及控制程序生成功能(步骤3),通过参照将所述基本动作与用于实现所述基本动作的程序组件相对应地存储的对应关系,来将所述动作图中记载的所述基本动作变换为所述程序组件,并且通过按照所述部分期间的顺序将所述程序组件进行结合,来生成用于使所述自动制造机械动作的所述控制程序。
技术总结
事先将搭载于自动制造机械(1)的多个致动器的基本动作(206)与用于实现基本动作的程序组件相对应地进行存储。另外,事先通过动作图(200)来描述自动制造机械的动作,在该动作图(200)中,将从自动制造机械开始动作起至结束动作为止的动作期间分割为多个部分期间,将自动制造机械的动作分解为多个基本动作,并且将基本动作分配于多个部分期间中的任一个部分期间。然后,读取描述有自动制造机械的动作的动作图,将动作图中的基本动作变换为程序组件,并且按照动作图中的部分期间的顺序将程序组件进行结合。如此,能够自动地生成用于控制自动制造机械的动作的控制程序。自动制造机械的动作的控制程序。自动制造机械的动作的控制程序。
技术研发人员:与语照明
受保护的技术使用者:株式会社欧普同
技术研发日:2021.01.26
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。