1.本发明涉及飞行器制导控制领域,具体涉及一种基于隔离度在线补偿的滚转飞行器控制方法。
背景技术:
2.工程实际中,滚转飞行器导引头常见的结构为平台式导引头,其作用为保证导引头光轴在空间的稳定性,完成对目标的搜索、捕获与跟踪。实际平台导引头系统单通道控制回路中包含反电动势回路、干扰力矩回路、稳定回路和跟踪回路。反电动势回路的产生是由于电磁效应,在电机转动的过程中转子切割磁力线,产生与电机驱动电压相反的电动势;干扰力矩回路是由于平台导引头在转动时导线拉扯和转动时摩擦等造成;稳定回路作为跟踪回路的内回路,作用是隔离飞行器角扰动、稳定导引头光轴指向以及改善跟踪系统的特性;跟踪回路的作用是在手动或自动跟踪模式下,依据射手或图像跟踪器给出的目标位置误差信息,控制导引头光轴运动,以实现对目标的实时跟踪。
3.在滚转飞行器飞行过程中,飞行器姿态扰动会部分耦合到导引头中,从而使输出的目标视线角速度存在误差,降低了制导系统的稳定性和制导精度;滚转飞行器导引头隔离度产生的主要因素为干扰力矩回路,而滚转飞行器在线补偿干扰力矩回路带来的隔离度,目前尚未有针对性的解决方案。
4.由于上述原因,本发明人对现有的制导控制方法做了深入研究,以期待设计出一种能够解决上述问题的新的基于隔离度在线补偿的滚转飞行器控制方法。
技术实现要素:
5.为了克服上述问题,本发明人进行了锐意研究,设计出一种基于隔离度在线补偿的滚转飞行器控制方法,该方法中,通过连续计算求得稳定的收敛值,进而获得到干扰力矩引起的干扰角加速度,在此基础上,实时对平台导引头输出的视线角速度进行补偿,得到更为准确的目标视线角速度,据此生成过载指令,从而完成本发明。
6.具体来说,本发明的目的在于提供一种基于隔离度在线补偿的滚转飞行器控制方法,在飞行器的末制导段中,该方法包括如下步骤:
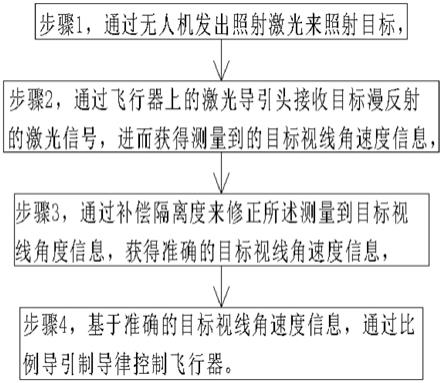
7.步骤1,通过无人机发出照射激光来照射目标,
8.步骤2,通过飞行器上的激光导引头接收目标漫反射的激光信号,进而获得测量到的目标视线角速度信息,
9.步骤3,通过补偿隔离度来修正所述测量到的目标视线角速度信息,获得准确的目标视线角速度信息,
10.步骤4,基于准确的目标视线角速度信息,通过比例导引制导律控制飞行器。
11.其中,步骤3中包括子步骤1,在进入末制导段以后,通过下式(一)实时获得干扰角加速度;
[0012][0013]
z0、z1、z2、v0和v1均为中间变量,表示z0的导数,表示z1的导数,表示z2的导数;
[0014]
y表示输入量
[0015]uδ
表示实时测量得到的电枢电压,
[0016]
k2表示稳定回路放大器增益,
[0017]kt
表示力矩常数,
[0018]
j表示电机转动惯量,
[0019]
r表示电枢绕组的电阻,
[0020]
x1表示平台导引头光轴空间角的状态量;
[0021]
λ0、λ1、λ2和l都表示设计的增益值。
[0022]
其中,在步骤3中,实时读取测量得到的电枢电压,进而解算式(一)得到z0、z1、z2、v0和v1,当获得的z1稳定收敛时,计算停止,
[0023]
其中,稳定收敛到的固定值为-e。
[0024]
其中,当第k 1次解算得到的z1值与第k次解算得到的z1值满足时,z1稳定收敛;
[0025]
优选地,在z1稳定收敛时,选取
[0026]
其中,步骤3中包括子步骤2,通过下式(二)实时获得干扰角加速度e引起的附加视线角速度
[0027][0028]
其中,表示附加视线角速度,
[0029]
k1表示跟踪回路放大器增益,
[0030]
k2表示稳定回路放大器增益,
[0031]kt
表示力矩常数,
[0032]
kg表示速率陀螺的电压刻度系数,
[0033]
j表示电机转动惯量,
[0034]
r表示电枢绕组的电阻,
[0035]
s表示复数域的变量。
[0036]
其中,步骤3中包括子步骤3,通过下式(三)实时获得准确的目标视线角速度信息,
[0037][0038]
其中,表示准确的目标视线角速度,表示测量到的目标视线角速度。
[0039]
其中,在步骤4中,通过下式(四)实时获得过载指令,进而据此控制飞行器:
[0040][0041]
其中,ac表示过载指令,n为比例系数,vc表示飞行器与目标的相对速度。
[0042]
根据本发明所述的基于隔离度在线补偿的滚转飞行器控制方法中,在进入末制导段时求得干扰角加速度引起的附加视线角速度,并据此对平台导引头输出的视线角速度进行补偿,从而获得更为准确的视线角速度,以便于制导控制指令更为准确。
附图说明
[0043]
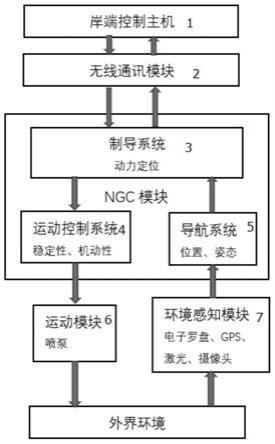
图1示出根据本发明一种优选实施方式的基于隔离度在线补偿的滚转飞行器控制方法整体方案逻辑图;
[0044]
图2示出本发明实验例1中补偿前后的视线角速度对比图;
[0045]
图3示出图2的放大图;
[0046]
图4示出本发明实验例2中飞行器和目标的运动轨迹图;
[0047]
图5示出图4的放大图。
具体实施方式
[0048]
下面通过附图和实施例对本发明进一步详细说明。通过这些说明,本发明的特点和优点将变得更为清楚明确。
[0049]
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
[0050]
根据本发明提供的基于隔离度在线补偿的滚转飞行器控制方法,如图1中所示,在飞行器的末制导段中,该方法包括如下步骤:
[0051]
步骤1,通过无人机发出照射激光来照射目标,
[0052]
步骤2,通过飞行器上的激光导引头接收目标漫反射的激光信号,进而获得测量到的目标视线角速度信息,
[0053]
步骤3,通过补偿隔离度来修正所述测量到的目标视线角速度信息,获得准确的目标视线角速度信息,
[0054]
步骤4,基于准确的目标视线角速度信息,通过比例导引制导律控制飞行器。
[0055]
本技术中,飞行器在发射后,首先向斜上方飞行,此时飞行器处于无控状态,在到达最高点时,飞行器进入中制导段,飞行器上的弹载设备上电工作,包括飞行器上的卫星接
收装置也上电工作,能够实时获知飞行器自身的速度和位置信息;当飞行器和目标的距离到达一定范围内时,飞行器上激光导引头的整流罩脱落,露出激光导引头,激光导引头开始接收反射激光,此时飞行器进入到末制导段,根据过载指令控制飞行器。
[0056]
本技术中,在飞行器发射前,控制无人机飞向目标区域,并且悬停在目标区域上方,在飞行器发射后,地面控制站将飞行器发射的具体时间信息发送给无人机,无人机根据飞行器的速度及发射点与目标之间的距离获知飞行器的飞行时间和进入到末制导段的时间,在飞行器进入末制导段前两秒左右发射激光照射目标,从而使得飞行器上的导引头能够捕获到漫反射来的激光信号,从而定位目标的位置。
[0057]
在一个优选的实施方式中,步骤3中包括子步骤1,在进入末制导段以后,通过下式(一)实时获得干扰角加速度;即在进入到制导段时立即测量电枢电压,据此执行该子步骤1;
[0058][0059]
z0、z1、z2、v0和v1均为中间变量,无具体的物理含义,表示z0的导数,表示z1的导数,表示z2的导数;
[0060]
sgn表示符号函数,即
[0061]
y表示输入量,
[0062]uδ
表示实时测量得到的电枢电压,
[0063]
k2表示稳定回路放大器增益,优选地取值为k2=123,
[0064]kt
表示力矩常数,优选地取值为k
t
=0.2344n
·m·
a-1
,
[0065]
j表示电机转动惯量,优选地取值为j=0.002kg
·
m2,
[0066]
r表示电枢绕组的电阻,优选地取值为r=8ω;
[0067]
λ0、λ1、λ2和l都表示设计的增益值;优选地取值为λ0=10,λ1=14,λ2=19,l=4。
[0068]
x1表示平台导引头光轴空间角的状态量;是由角速率陀螺实时输出的平台导引头光轴空间角速度积分一次得到的,在本技术的解算过程中是已知量。
[0069]
在一个优选的实施方式中,在步骤3中,实时读取测量得到的电枢电压,进而解算式(一)得到z0、z1、z2、v0和v1,优选地,每秒读取20次该电枢电压,并执行20次解算,直至计算停止;
[0070]
当获得的z1稳定收敛时,计算停止,
[0071]
其中,稳定收敛到的固定值为-e,即z1的稳定收敛值等于干扰角加速度的负值。
[0072]
在一个优选的实施方式中,当第k 1次解算得到的z1值与第k次解算得到的z1值满足时,z1稳定收敛;
[0073]
优选地,在z1稳定收敛时,选取
[0074]
在一个优选的实施方式中,步骤3中包括子步骤2,通过下式(二)实时获得干扰角加速度e引起的附加视线角速度加速度e引起的附加视线角速度
[0075]
其中,表示附加视线角速度,
[0076]
k1表示跟踪回路放大器增益,
[0077]
k2表示稳定回路放大器增益,
[0078]kt
表示力矩常数,
[0079]
kg表示速率陀螺的电压刻度系数,
[0080]
j表示电机转动惯量,
[0081]
r表示电枢绕组的电阻,
[0082]
s表示复数域的变量,代表式(二)所示传递函数的自变量,若将复数域的变量s用时间域的微分算子d/dt置换,则式(二)由传递函数变为微分方程,若将复数域的变量s用算符jω置换,则式(二)由传递函数变为频率特性。
[0083]
在一个优选的实施方式中,步骤3中包括子步骤3,通过下式(三)实时获得准确的目标视线角速度信息,
[0084][0085]
其中,表示准确的目标视线角速度,表示测量到的目标视线角速度。即通过相减的方式抵消隔离度引起的目标视线角速度误差。
[0086]
在一个优选的实施方式中,在步骤4中,通过下式(四)实时获得过载指令,进而据此控制飞行器:
[0087][0088]
其中,ac表示过载指令,n为比例系数,其取值优选地为4,vc表示飞行器与目标的相对速度,通过卫星接收装置实时获得。将过载指令发送给飞行器上的舵机系统,舵机系统据此控制舵机打舵,调整飞行器的姿态,从而使得飞行器朝向目标飞行。
[0089]
实验例1:
[0090]
设置干扰角加速度e为幅值a=1.5
°
/s2,频率ω=1rad/s的正弦扰动信号,k1=14,k2=123,kg=1,r=8ω,k
t
=0.2344n
·m·
a-1
,j=0.002kg
·
m2。
[0091]
采用式(一)、式(二)和式(三)对导引头视线角速度进行补偿,
[0092][0093]
z0、z1、z2、v0和v1均为中间变量,无具体的物理含义,表示z0的导数,表示z1的导数,表示z2的导数;
[0094]
y表示输入量,
[0095]uδ
表示实时测量得到的电枢电压,在实验中通过matlab/simulink搭建模块进行仿真,即u
δ
的测量值通过模块实时给出;
[0096]
λ0=10,λ1=14,λ2=19,l=4。
[0097]
连续多次计算式(一),当获得的z1稳定收敛时,稳定收敛到的固定值为-e。
[0098][0099][0100]
仿真结果如图2所示,其中,虚线表示补偿前的视线角速度,即实线表示补偿后的视线角速度,即图3表示图2的放大图,由图2、图3可知:由干扰力矩引起的干扰角加速度所带来的导引头视线角速度变化幅值约为0.068
°
/s,补偿后的导引头视线角速度变化幅值是0.0001
°
/s,因而补偿方案很大程度上抑制了隔离度对导引头视线角速度的影响。
[0101]
进一步地,由于在仿真时将e设置为上述已知正弦信号,根据式(一)估计e,然后根据式(二)解算e引起的并依据式(三)进行补偿,通过输出补偿前后的视线角速度对比图即图2所示,补偿后的视线角速度近似为0,因而能够说明上述算法可靠性较高,能够精确地估计干扰角加速度e并消除干扰角加速度e引起的附加视线角速度。
[0102]
实验例2:
[0103]
设定目标为速度可变的地面目标,其运动轨迹如图4和图5中的实线所示,发射飞行器朝向该目标飞行,该飞行器采用基于隔离度在线补偿的滚转飞行器控制方法进行控制,具体来说包括如下步骤:
[0104]
步骤1,通过无人机发出照射激光来照射目标,
[0105]
步骤2,通过飞行器上的激光导引头接收目标漫反射的激光信号,进而获得测量到的目标视线角速度信息,
[0106]
步骤3,通过补偿隔离度来修正所述测量到的目标视线角速度信息,获得准确的目
标视线角速度信息,
[0107]
步骤4,基于准确的目标视线角速度信息,通过比例导引制导律控制飞行器。
[0108]
其中,无人机在飞行器进入末制导段前两秒发射激光,并被目标发现,目标立即调整行进方向;
[0109]
飞行器上的导引头在进入到末制导段以后捕获到目标处漫反射的激光信号,并据此获得测量到的目标视线角速度
[0110]
飞行器上,在进入到末制导段以后,通过下式(一)获得干扰角加速度,
[0111][0112][0113]
λ0=10,λ1=14,λ2=19,l=4,k2=123,k
t
=0.2344n
·m·
a-1
,j=0.002kg
·
m2,r=8ω,u
δ
表示实时测量得到的电枢电压;
[0114]
每秒读取20次该电枢电压,并执行20次解算,直至获得的z1稳定收敛;稳定收敛到的固定值为-e,即稳定收敛值等于干扰角加速度的负值;
[0115]
通过下式(二)获得干扰角加速度e引起的附加视线角速度
[0116][0117]
k2=123,k
t
=0.2344n
·m·
a-1
,j=0.002kg
·
m2,r=8ω,kg=1,k1=14,s为复数域的变量;
[0118]
再通过下式(三)获得准确的目标视线角速度;
[0119][0120]
最后通过下式(四)时获得过载指令:
[0121][0122]
根据过载指令控制飞行器,得到的飞行器轨迹如图4和图5中的虚线所示;
[0123]
根据图4和图5可知,即使目标中途改变行进方向,飞行器最终仍然命中目标。
[0124]
以上结合了优选的实施方式对本发明进行了说明,不过这些实施方式仅是范例性的,仅起到说明性的作用。在此基础上,可以对本发明进行多种替换和改进,这些均落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。