1.本发明涉及使用导纳控制而能够实现基于位置控制驱动装置或者速度控制驱动装置的力控制的驱动单元。
背景技术:
2.以往,为了控制驱动装置(致动器或者作为其集成的机器人)产生的力而使用各种控制方法。例如,在能够进行驱动装置被位置控制或者速度控制并且利用力计测器计测驱动装置对环境作用的驱动力的情况下,经常使用被称作导纳控制的控制方法。
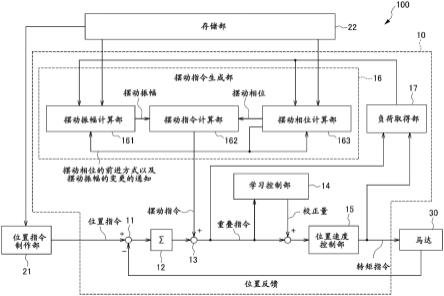
3.在图10中示出应用有导纳控制的典型的驱动单元100。一般来说,在导纳控制中,设想具有理想的动态特性的假想物体,并基于由力计测器106计测出的驱动力的信息,利用导纳模型运算装置103(正运动学模拟)对假想物体的运动进行模拟。此时,驱动装置111以追随作为模拟结果的假想物体的运动的方式被位置控制器110位置控制。若该位置控制足够准确,则驱动装置111对来自环境50的外力的反应接近假想物体所具有的理想的动态特性。即,若使用导纳控制,则能够利用位置控制驱动装置104实现按照理想的动态特性的力控制。
4.需要说明的是,例如在专利文献1中记载有在导纳控制中设想假想物体。
5.然而,已知有:在驱动装置111为一般的旋转马达,并且在其输出侧设置有由减速机构成的传递装置105的情况下,在存在于传递装置105的相对较大的惯性以及摩擦(比存在于驱动装置111大的惯性以及摩擦)的作用下,引起所谓的反向驱动性降低(例如,参照非专利文献1)。若引起反向驱动性降低,则驱动装置111难以顺畅地或者灵活地应对来自环境50的外力。
6.该点,根据上述的导纳控制,若在成为最终输出轴的传递装置105的输出轴设置力计测器106并应用导纳控制,并只要将假想物体的动态特性设定为低惯性并且低摩擦,则即使传递装置105的反向驱动性低,也能够针对来自环境50的外力实现低惯性且低摩擦的高反向驱动性。若能够提高反向驱动性,则能够期待驱动装置111的安全性提高,并且驱动装置111顺畅地适应环境50。
7.在先技术文献
8.专利文献
9.专利文献1:日本专利第6032811号公报
10.非专利文献
11.非专利文献1:鈴森康一,“机器人与致动器的反向驱动性”,日本机器人学会志,2013年7月,第31卷,第6号,p.548-551
技术实现要素:
12.发明要解决的课题
13.然而,若为了实现高反向驱动性而将假想物体的惯性设定得过低,则假想物体的
加速度对于驱动力变得过大,位置控制驱动装置104中的位置控制不稳定化。
14.另外,根据驱动单元100的用途,也有时优选为低反向驱动性。例如,对于作为传递装置105而包含具有高减速比的减速机的驱动部102而言,表观的机构惯性(即,实际的驱动部102所具有的惯性)相对较大,但若以配合该机构惯性的方式设定假想物体的惯性,则能够难以对驱动装置111造成负担,并且提高位置控制的稳定性。
15.而且,通过并不是单纯减小假想物体的摩擦,而是导入性质良好的摩擦(例如线性的粘性摩擦、理想的库伦摩擦),从而也能够实现(1)在应静止时驱动装置111不会摇晃而与静止,(2)在应动作时驱动装置111不会成为过高的速度而是顺畅且轻快地动作这样的功能。
16.如此,高反向驱动性以及低反向驱动性分别具有优点。然而,在仅设想单一的假想物体的以往导纳控制中,难以兼顾高反向驱动性的优点与低反向驱动性的优点。
17.本发明是鉴于上述事由而完成的,且课题在于提供兼备高反向驱动性的优点与低反向驱动性的优点的驱动单元。
18.用于解决课题的方案
19.为了解决上述课题而本发明的第一驱动单元使与从外部赋予的目标驱动力指令相应的驱动力作用于环境,所述第一驱动单元具有如下特征,所述驱动单元具备:参数存储装置,其存储有受到假想相互作用力的影响的第一假想物体以及第二假想物体的动态特性参数;力计测器,其将驱动力的计测结果作为驱动力计测值而输出;导纳模型运算装置,其将通过根据在参数存储装置存储的第一假想物体及第二假想物体的动态特性参数、目标驱动力指令、以及驱动力计测值进行运算而求出的第一假想物体的位移输出;以及位置控制驱动装置,其通过追随目标位置指令并进行动作从而对环境作用驱动力;力计测器配置于位置控制驱动装置与环境之间,目标位置指令与从导纳模型运算装置输出的第一假想物体的位移对应。
20.上述第一驱动单元的位置控制驱动装置例如为追随目标位置指令并进行动作的单一轴的装置。
21.另外,为了解决上述课题而本发明的第二驱动单元使与从外部赋予的目标驱动力指令相应的驱动力作用于环境,所述驱动单元具有如下特征,所述驱动单元具备:参数存储装置,其存储有受到假想相互作用力的影响的第一假想物体以及第二假想物体的动态特性参数;力计测器,其将驱动力的计测结果作为驱动力计测值而输出;导纳模型运算装置,其将通过根据在参数存储装置存储的第一假想物体及第二假想物体的动态特性参数、目标驱动力指令、以及驱动力计测值进行运算而求出的第一假想物体的速度输出;以及速度控制驱动装置,其通过追随目标速度指令并进行动作从而对环境作用驱动力,力计测器配置于速度控制驱动装置与环境之间,目标速度指令与从导纳模型运算装置输出的第一假想物体的速度对应。
22.上述第二驱动单元的速度控制驱动装置例如为追随目标速度指令并进行动作的单一轴的装置。
23.优选的是,在上述第一以及第二驱动单元的参数存储装置存储的第一假想物体以及第二假想物体的动态特性参数能够进行自外部的变更。
24.上述第一以及第二驱动单元也可以具有如下特征,驱动力计测值在导纳模型运算
装置的运算中仅直接作用于第一假想物体的动态特性,目标驱动力指令在导纳模型运算装置的运算中仅直接作用于第二假想物体的动态特性,并且第一假想物体以及第二假想物体的动态特性仅经由假想相互作用力模型输出的假想相互作用力而相互作用。
25.也可以是,上述第一以及第二驱动单元的参数存储装置还存储假想相互作用力模型的相互作用参数(其中包含假想相互作用力的上限值以及下限值)。
26.上述第一以及第二驱动单元的假想相互作用力模型也可以具有使在第一假想物体以及第二假想物体之间产生的相对位移或者相对速度收敛为零的功能,在该情况下,上述第一以及第二驱动单元的参数存储装置也可以还存储假想相互作用力模型的相互作用参数(其中包含上述收敛的参数)。
27.优选的是在上述第一以及第二驱动单元的参数存储装置存储的假想相互作用力模型的相互作用参数能够进行自外部的变更。
28.发明效果
29.根据本发明,能够提供兼备高反向驱动性的优点与低反向驱动性的优点的驱动单元。
附图说明
30.图1是本发明的第一实施例的驱动单元的示意性实体图。
31.图2是本发明的第一实施例的驱动单元的框线图。
32.图3是示出本发明中的第一假想物体与第二假想物体的关系的图。
33.图4是本发明的第二实施例的驱动单元的示意性实体图。
34.图5是本发明的第二实施例的驱动单元的框线图。
35.图6是本发明的第三实施例的驱动单元的示意性实体图。
36.图7是本发明的第三实施例的驱动单元的框线图。
37.图8是本发明的变形例的驱动单元的示意性实体图。
38.图9是本发明的变形例的驱动单元的框线图。
39.图10是以往的驱动单元的框线图。
具体实施方式
40.以下,参照附图对本发明的驱动单元的几个实施例进行说明。
41.[第一实施例]
[0042]
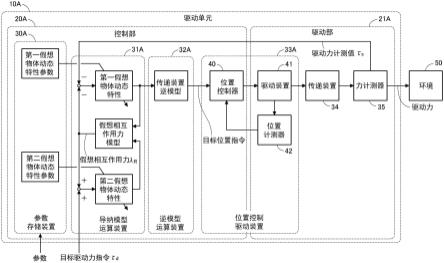
在图1中示出本发明的第一实施例的驱动单元10a的示意性实体图。本实施例的驱动单元10a将与从外部赋予的目标驱动力指令τd相应的驱动力作用于环境,并具备控制部20a以及驱动部21a。
[0043]
控制部20a包括微处理器以及随附于该微处理器的易失性/非易失性的存储器等。
[0044]
另一方面,驱动部21a包括:驱动装置41,其包括单一轴的旋转马达;位置计测器42,其计测驱动装置41的位移并且将该计测的结果作为位置计测值而输出;传递装置34,其设置于驱动装置41的输出轴且包括减速机;以及力计测器35,其设置于传递装置34的最终端(最终输出轴)且包括扭矩传感器。力计测器35计测驱动单元10a对环境作用的驱动力并且将该计测的结果作为驱动力计测值τs而输出。驱动装置41通过从控制部20a赋予的驱动
电流而被位置控制。
[0045]
需要说明的是,驱动装置41也可以是任意的致动器或者多轴的机器人。传递装置34也可以是将驱动装置41的内部驱动力转换为适当的形式而向环境传递的任意动力传动系(离合器、变速器、驱动轴、连杆等)。另外,在驱动装置41为平移系的情况下,力计测器35优选为力传感器。
[0046]
在图2中示出本实施例的驱动单元10a的框线图。如该图所示,驱动单元10a的控制部20a包括参数存储装置30a、导纳模型运算装置31a、逆模型运算装置32a、以及与前述的驱动装置41和位置计测器42一起构成位置控制驱动装置33a的位置控制器40。位置控制驱动装置33a追随目标位置指令而进行动作。
[0047]
导纳模型运算装置31a构成为按照目标驱动力指令τd以及驱动力计测值τs对由数学式(1)~(3)构成的联立微分方程式进行时间积分,从而对第一假想物体以及第二假想物体的运动进行模拟。
[0048]
[数1]
[0049]
[第一假想物体的动态特性]
[0050]
κmp
″1 γdp
′1=-τ
s-λr···
(1)
[0051]
[数2]
[0052]
[第二假想物体的动态特性]
[0053]
(1-κ)mp
″2 (1-γ)dp
′2=τd λr···
(2)
[0054]
[数3]
[0055]
[假想相互作用力模型]
[0056]
λr=λr(p
″1,p
′1,p1,p
″2,p
′2,p2)
···
(3)
[0057]
其中,
[0058]
m、κ:假想物体总惯性、惯性分配率(0<κ<1)
[0059]
d、γ:假想物体总粘性摩擦、粘性摩擦分配率(0<γ<1)
[0060]
p1、p
’1、p”1
:第一假想物体的位移、速度、加速度
[0061]
p2、p
’2、p”2
:第二假想物体的位移、速度、加速度
[0062]
λr:假想相互作用力。
[0063]
从确保控制的稳定性、减少对机构的负担的观点出发优选为假想物体总惯性m设定为与驱动部21a的机构所具有的实际总惯性一致。但是,所谓的基于模型的控制那样不需要在意模型化误差,即使有误差,若能够确保控制的稳定性,则也没有问题。
[0064]
另一方面,假想物体总粘性摩擦d不需要与驱动部21a的机构所具有的实际总粘性摩擦一致。但是,粘性摩擦由于会影响控制的稳定性确保、定位性能的提高,因此需要考虑整体的平衡而适当地设定。
[0065]
关于惯性分配率κ以及粘性摩擦分配率γ的设定,在后进行说明。
[0066]
参数存储装置30a作为第一假想物体动态特性参数以及第二假想物体动态特性参数而存储有假想物体总惯性m、惯性分配率κ、假想物体总粘性摩擦d以及粘性摩擦分配率γ。在本实施例中,能够在任意的时机根据外部变更这些参数。
[0067]
需要说明的是,参数存储装置30a也可以代替m、κ、d以及γ而存储有作为第一假想物体动态特性参数的第一假想物体惯性m1(=κm)和第一假想物体粘性摩擦d1(=γd)以及
作为第二假想物体动态特性参数的第二假想物体惯性m2(=(1-κ)m)和第二假想物体粘性摩擦d2(=(1-γ)d)。这些参数也优选为能够在任意的时机自外部而变更。
[0068]
在图3中示出第一假想物体以及第二假想物体的关系。如该图可知,在导纳模型运算装置31a的运算中,第一假想物体的动态特性与第二假想物体的动态特性成为分离且仅经由假想相互作用力模型所输出的假想相互作用力λr而相互作用。另外,在导纳模型运算装置31a的运算中,目标驱动力指令τd仅直接作用于第二假想物体的动态特性,驱动力计测值τs仅直接作用于第一假想物体的动态特性。
[0069]
再次参照图2。逆模型运算装置32a通过逆运算将由导纳模型运算装置31a的运算求出的第一假想物体的位移p1(即,驱动单元10a的最终端位移)转换为针对位置控制驱动装置33a的目标位置指令qd。
[0070]
更详细而言,在传递装置34包括减速机的本实施例中,在位置控制驱动装置33a的位移q与驱动单元10a的最终端位移p之间存在数学式(4)所示的几何学关系(其中,nr为减速机的减速比),因此使用由数学式(5)表示的传递装置逆模型,从而能够得到针对位置控制驱动装置33a的目标位置指令qd。
[0071]
[数4]
[0072][0073]
[数5]
[0074]
qd=p-1
(p1)=nrp1···
(5)
[0075]
即,逆模型运算装置32a在传递装置34的输入输出之间存在数学式(6)所示的几何学关系(运动学)的情况下进行数学式(7)所示的逆运算(逆运动学)。
[0076]
[数6]
[0077]
p=p(q)
···
(6)
[0078]
[数7]
[0079]
q=p-1
(p)
···
(7)
[0080]
构成位置控制驱动装置33a的位置控制器40按照目标位置指令对驱动装置41进行位置控制。此时,位置控制器40参照位置计测器42所输出的位置计测值。
[0081]
如此,在本实施例的驱动单元10a中,基于由力计测器35计测出的驱动力的信息(驱动力计测值τs)对仅由假想相互作用力λr相连的两个假想物体(第一假想物体以及第二假想物体)的运动进行模拟,并且以追随第一假想物体的运动的方式对驱动装置41进行位置控制。因而,根据驱动单元10a,通过适当地设定分配率κ、γ,从而能够兼顾高反向驱动性的优点与低反向驱动性的优点。
[0082]
[第二实施例]
[0083]
在图4以及图5中示出本发明的第二实施例的驱动单元10b。本实施例的驱动单元10b在代替控制部20a而具备控制部20b这点以及代替驱动部21a而具备驱动部21b这点与驱动单元10a不同。
[0084]
控制部20b在代替逆模型运算装置32a而具备逆模型运算装置32b这点以及代替位置控制器40而具备速度控制器43这点与控制部20a不同,但在其他点与控制部20a共通。
[0085]
另一方面,驱动部21b在代替位置计测器42而具备速度计测器44这点与驱动部21a
不同,但在其他点与驱动部21a共通。
[0086]
逆模型运算装置32b通过逆运算将由导纳模型运算装置31a的运算求出的第一假想物体的速度p
’1转换为针对速度控制驱动装置33b的目标速度指令。
[0087]
构成速度控制驱动装置33b的速度控制器43按照目标速度指令对驱动装置41进行速度控制。此时,速度控制器43参照由速度计测器44计测出的驱动装置41的速度(速度计测值)。
[0088]
根据本实施例的驱动单元10b,与第一实施例相同地,通过适当地设定分配率κ、γ,从而能够兼顾高反向驱动性的优点与低反向驱动性的优点。
[0089]
[第三实施例]
[0090]
在图6以及图7中示出本发明的第三实施例的驱动单元10c。本实施例的驱动单元10c在代替控制部20a而具备控制部20c这点与驱动单元10a不同,但在具备驱动部21a这点与驱动单元10a共通。
[0091]
控制部20c在代替参数存储装置30a而具备参数存储装置30c这点以及代替导纳模型运算装置31a而具备导纳模型运算装置31c这点与控制部20a不同,但在其他点与控制部20a共通。
[0092]
导纳模型运算装置31c构成为按照目标驱动力指令τd以及驱动力计测值τs对由前述的数学式(1)、(2)以及数学式(8)、(9)构成的联立微分方程式进行时间积分,从而对第一假想物体以及第二假想物体的运动进行模拟。
[0093]
[数8]
[0094]
[假想相互作用力模型]
[0095][0096]
λ
rpd
=λ
rpd
(p
′1,p
′2,p1,p2)=k
rp
(p
2-p1) k
rd
(p
′
2-p
′1)
···
(9)
[0097]
其中,
[0098]rupper
:假想相互作用力的上限值
[0099]rlower
:假想相互作用力的下限值
[0100]krp
、k
rd
:假想相互作用力模型的增益。
[0101]
参数存储装置30c除了第一假想物体动态特性参数以及第二假想物体动态特性参数,作为假想相互作用力参数还存储有假想相互作用力的上下限值r
upper
、r
lower
以及假想相互作用力模型的增益k
rp
、k
rd
。这些参数也优选为在任意的时机能够自外部而变更。
[0102]
在本实施例的驱动单元10c中,以下所示的两个功能追加至假想相互作用力模型。
[0103]
首先,对“假想扭矩限制功能”进行说明。
[0104]
在来自环境50的外力为r
lower
以上r
upper
以下时数学式(9)的λ
rpd
按照原样地成为假想相互作用力λr。此时,第一假想物体以及第二假想物体能够视为对于该外力成为一体而运动。另一方面,若施加超过r
upper
的外力或者低于r
lower
的外力,则第一假想物体以及第二假想物体进行相对运动。换言之,第一假想物体相对于第二假想物体滑动。
[0105]
在本实施例中,与第一实施例相同,将对第一假想物体的位移p1进行逆运算的结
果设为位置控制驱动装置33a的目标位置指令。因此,若第一假想物体相对于第二假想物体滑动,则在环境50侧得到如驱动单元10c的最终输出轴滑动那样的感觉。而且,此时,实际施加于构成驱动部21a的机械部件的扭矩被限制。
[0106]
总结而言,根据本功能,通过对假想相互作用力λr设置上下限,从而将施加于构成驱动部21a的机械部件(特别是容易破损的传递装置34以及力计测器35)的负荷抑制为一定值以下,能够防止这些部件的破损等。即,根据本实施例的驱动单元10c,能够在软件上保护硬件。
[0107]
需要说明的是,在驱动装置41为并进系的情况下,实际施加于构成驱动部21a的机械部件的力被限制。因而,在该情况下,应将本功能称作“假想力限制”。
[0108]
接着,对“滑动恢复功能”进行说明。
[0109]
若假想扭矩限制(假想力限制)进行工作,则第一假想物体以及第二假想物体进行相对运动。根据本功能,能够将第一假想物体以及第二假想物体的相对位移或者相对速度收敛为零。换言之,根据本功能,能够将由滑动产生的偏差恢复。
[0110]
为了实现该功能,在本实施例中,按照数学式(9)所示那样确定λ
rpd
。由此,第一假想物体与第二假想物体由假想的弹簧减振器连接,从而得到上述的效果。收敛的程度(强度)能够根据增益k
rp
、k
rd
来调整。
[0111]
根据本实施例的驱动单元10c,与第一实施例以及第二实施例相同,能够兼顾高反向驱动性的优点与低反向驱动性的优点。
[0112]
使用通过将惯性分配率κ设定为相对较小的0.1从而将第一假想物体的惯性设为0.1m并且将第二假想物体的惯性设为0.9m的一例,对本实施例的作用效果进一步详地进行说明。
[0113]
在假想扭矩限制未工作时,第一假想物体与第二假想物体成为一体而运动,因此在环境50侧得到驱动单元10c的最终输出轴的惯性如m(=0.1m 0.9m)那样的感觉。因此,根据本实施例的驱动单元10c,通过使该m与驱动部21a所具有的实际惯性一致,从而能够防止对驱动装置41施加负荷,并提高位置控制的稳定性。即,能够得到低反向驱动性的优点。
[0114]
另一方面,在假想扭矩限制工作时,从环境50侧观察到的最终输出轴的惯性为最小且降低到0.1m。因此,根据本实施例的驱动单元10c,能够保护构成驱动部21a的机械部件以避免过负荷。即,能够得到高反向驱动性的优点。
[0115]
如到此为止所述那样,在本发明中,根据分配率κ、γ将假想物体总惯性m以及假想物体总粘性摩擦d分配至第一假想物体以及第二假想物体。分配率κ、γ会对假想扭矩限制工作时的行动有影响,越减小分配率κ、γ则对于过负荷的保护性能越提高。然而,若使分配率κ、γ过小,则在假想扭矩限制工作时有时位置控制驱动装置33a的位置控制不稳定化,关于该点需要注意。
[0116]
[变形例]
[0117]
以上,对本发明的驱动单元的第一实施例~第三实施例进行了说明,但本发明的结构并不限定于这些。
[0118]
例如,本发明的变形例的驱动单元10d也可以具备不包含逆模型运算部的控制部20d以及不包含传递装置的驱动部21d(参照图8以及图9)。该驱动单元10d可以说是从第三实施例的驱动单元10c省略了逆模型运算装置32a与传递装置34的驱动单元。在驱动单元
10d中,由导纳模型运算装置31c的运算求出的第一假想物体的位移p1成为针对位置控制驱动装置33a的目标位置指令。
[0119]
当然,也能够从第一实施例的驱动单元10a或者第二实施例的驱动单元10b省略逆模型运算部与传递装置。
[0120]
另外,也可以在第一实施例的驱动单元10a、第二实施例的驱动单元10b或者变形例的驱动单元10d附加假想扭矩限制功能以及滑动恢复功能。
[0121]
另外,在驱动装置41为不需要位置计测值的反馈的类型(例如步进电机)的情况下,从位置控制驱动装置33a中省略位置计测器42。同样,有时也能够省略速度控制驱动装置33b的速度计测器44。
[0122]
另外,第一假想物体的动态特性并不限定于数学式(1)所示的动态特性,也可以包含与库伦摩擦(静止摩擦
·
动摩擦)、可动范围限制等相关的项目。同样,第二假想物体的动态特性也并不限定于数学式(2)所示的动态特性。
[0123]
另外,假想相互作用力模型也并不限定于数学式(3)、(8)所示的假想相互作用力模型。
[0124]
工业上的可利用性
[0125]
本发明在对大输出且高减速比的驱动部以高安全性和适应性灵活地进行力控制的情况下特别有益。
[0126]
附图标记说明
[0127]
10a、10b、10c、10d
ꢀꢀ
驱动单元
[0128]
20a、20b、20c、20d
ꢀꢀ
控制部
[0129]
21a、21b、21d
ꢀꢀ
驱动部
[0130]
30a、30c
ꢀꢀ
参数存储装置
[0131]
31a、31c
ꢀꢀ
导纳模型运算装置
[0132]
32a、32b
ꢀꢀ
逆模型运算装置
[0133]
33a
ꢀꢀ
位置控制驱动装置
[0134]
33b
ꢀꢀ
速度控制驱动装置
[0135]
34
ꢀꢀ
传递装置
[0136]
35
ꢀꢀ
力计测器
[0137]
40
ꢀꢀ
位置控制器
[0138]
41
ꢀꢀ
驱动装置
[0139]
42
ꢀꢀ
位置计测器
[0140]
43
ꢀꢀ
速度控制器
[0141]
44
ꢀꢀ
速度计测器
[0142]
50
ꢀꢀ
环境。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。