1.本发明涉及传感器领域,特别是指一种触摸定位传感器制作方法及触摸定位传感器。
背景技术:
2.触摸定位传感器是一种能检测外部机械刺激,并融合、传递和识别信号的计算设备,是一种重要的人机交互界面。人机交互可以实现人与虚拟世界之间进行一些互动,通过人机交互界面可以控制虚拟世界。触摸定位传感器在各个领域都有重要的应用前景,例如消费电子、信息安全、机器人、虚拟现实、增强现实、人造皮肤、健康监测、可穿戴设备、触摸屏等。随着社会的不断进步,科技和经济不断发展,对于触摸定位传感器的需求不断增加。例如在信息安全领域,触摸定位传感器可以通过识别认证身份,防止信息隐私的泄露;在健康监测领域中,触摸定位传感器能通过监测人的生理信号来分析健康状况;在触摸屏领域中,能通过单点触碰或多点触碰实现图像缩放和物体控制等功能。
3.传统的触摸定位传感器一般需要m
×n×
2个电极(m和n为触摸点经纬线数目),这就导致了信号的传输和处理十分复杂,不能满足多点触碰等复杂的信号处理。具备高准确率、高稳定性又能学习并记忆人机交互的触摸定位传感器将会在人体健康监控、智能外科手术、信息隐私安全等领域扮演重要的角色。
4.目前触摸定位传感器取得了一些进展,通过结构设计,可以使电极的数量减少到m
×
n 1或m n,缩短了测量时间,简化了信号处理的过程(nano energy,2017,32,389-396; advanced materials,2018,30,1802516;专利cn202771407u)。但是这些触摸定位传感器要么不稳定易受到信号干扰,要么结构复杂电极数量众多。当前制备稳定性高、系统配置要求低、检测信号速度快且结构简单拥有电极数少的触摸定位传感器依然是一个比较大的挑战。
技术实现要素:
5.本发明的主要目的在于克服现有技术中触摸定位传感器存在的上述缺陷,提出一种触摸定位传感器制作方法及触摸定位传感器,具有快速大面积制备、成本低廉、产品性能好、操作简便等特点。
6.本发明采用如下技术方案:
7.一种触摸定位传感器制作方法,其特征在于,包括如下步骤:
8.1)在基板上制备若干个梯度电阻元件,该若干个梯度电阻元件的阻值不同且间隔排列成预设形状,并在每个梯度电阻元件两侧制作第一导电膜以连接相邻的梯度电阻元件;
9.2)每个梯度电阻元件两侧再分别制作第二导电膜,该两第二导电膜一端与对应的第一导电膜垂直并连接,另一端相对向内延伸且与梯度电阻平行,两第二导电膜之间具有间隙;
10.3)每个梯度电阻的两第二导电膜之间的间隙上方安装活动触摸按钮,该活动触摸按钮底端设有第三导电膜,活动触摸按钮被按压时,该第三导电膜与对应的两第二导电膜连接使得对应的梯度电阻元件短路;
11.4)在预设形状两端的第一导电膜末端制作电极。
12.步骤1)中,具体包括如下:
13.1.1)将四片胶带粘贴在基板上围成一区域,用8b铅笔在该区域中进行绘制,多次绘制后,使区域内充满导电材料,把胶带剥离即可得到光滑而均匀的导电薄膜形成一个梯度电阻元件;
14.1.2)重复步骤1.1)每次绘制次数不同即可得到多个不同电阻的梯度电阻元件,并将若干个梯度电阻排列成预设的形状,每个梯度电阻元件之间具有间隔;
15.1.3)采用银电路绘制笔在每个梯度电阻元件两侧绘制第一导电膜。
16.步骤2)中,采用银电路绘制笔在每个梯度电阻元件两侧再绘制第二导电膜。
17.步骤3)中,在每个所述梯度电阻元件中,所述第二导电膜另一端侧边设置垫片以安装所述触摸按钮。
18.步骤4)中,在预设形状两端的第一导电膜末端用银漆引出电极,通过电极实现电路连接和信号传输。
19.步骤4)中,还包括采用盖板与基板固定,所述若干个梯度电阻元件、所述第一导电膜和所述第二导电膜位于盖板和基板之间。
20.所述梯度电阻采用石墨烯、石墨粉、碳纳米管、导电炭黑粉、天然生物材料衍生的碳材料、无机导电材料、金属纳米线、金属纳米颗粒、金属材料或导电高分子材料。
21.所述基板采用纸张、高分子材料、木材或玻璃制作而成。
22.所述预设形状包括线形或弧形或s形。
23.一种触摸定位传感器,其特征在于,采用所述的一种触摸定位传感器制作方法制作而成。
24.由上述对本发明的描述可知,与现有技术相比,本发明具有如下有益效果:
25.1、本发明的触摸定位传感器相对于其它传感器而言,具有快速大面积制备、成本低廉、产品性能好、操作简便等特点。
26.2、本发明的触摸定位传感器在触摸前后的转变状态的响应时间为《3ms,很好地满足了快速检测的要求,具有响应快速等优势。
27.3、本发明的触摸定位传感器是一种只有两个电极的多点触摸定位传感器,而不是m
×nꢀ×
2或m n电极阵列,通过巧妙的设计,能够对物体控制进行熟练的操作识别,实现多种功能,消除了信号的串扰,又防止了位置传感的干扰,大大降低了人机交互系统的配置要求。
28.4、本发明的触摸定位传感器提出了梯度电阻元件结构,并将其应用于多点触控传感器的构建,将拓宽多机械刺激的检测识别范围,为人机交互提供多样化的可能性和实用性。
29.5、本发明的触摸定位传感器的主要原理是基于指尖触摸活动触摸按钮使得梯度电阻层产生电阻短路,这种电阻短路的产生会改变传感器的电阻,这种电阻的变化可以用来识别触摸按下的位置。
30.6、本发明的触摸定位传感器可以很容易地设计成多种形状和结构,用于实际应用场景开发的需求。
31.7、本发明的触摸定位传感器在包括人机交互、机械手臂、智能网络安全等领域具有广阔应用前景。
附图说明
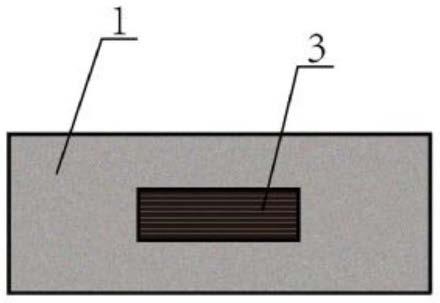
32.图1是单个梯度电阻元件示意图;
33.图2是线性形状的梯度电阻元件排列示意图;
34.图3是多个梯度电阻元件与第一导电膜连接示意图;
35.图4是图3单个梯度电阻元件与第一导电膜连接的放大图;
36.图5是绘制第二导电膜示意图;
37.图6是图5的单个梯度电阻元件的放大图;
38.图7是活动触摸按钮示意图;
39.图8是安装垫片示意图;
40.图9是图8的单个结构示意图;
41.图10是安装活动触摸按钮示意图(实施例一);
42.图11是制作电极示意图;
43.图12是本发明立体示意图(实施例一);
44.图13是实施例二的弧形触摸定位传感器的示意图;
45.图14是实施例三的s形触摸定位传感器的示意图;
46.其中:1、基板,2a、第一导电膜,2b、第二导电膜,3、梯度电阻元件,4、垫片,5、电极,6、活动触摸按钮,6a、第三导电膜。
47.以下结合附图和具体实施例对本发明作进一步详述。
具体实施方式
48.以下通过具体实施方式对本发明作进一步的描述。
49.本发明中,对于术语“第一”、“第二”、“第三”等仅用于区别类似的对象,而不必用于描述特定的顺序或先后次序,也不能理解为指示或暗示相对重要性。对于描述中,采用了“上”、“下”、“左”、“右”、“前”和“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
50.另外,在本技术的描述中,除非另有说明,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。
51.实施例一
52.一种触摸定位传感器制作方法,包括如下步骤:
53.1)在基板1上制备若干个梯度电阻元件3,该若干个梯度电阻元件3的阻值不同且间隔排列成预设形状,并在每个梯度电阻元件3两侧制作第一导电膜2a以连接相邻的梯度
电阻元件3;具体包括如下:
54.1.1)将四片胶带粘贴在基板1上围成一区域,用8b铅笔在该区域中进行绘制,多次绘制后,使区域内充满导电材料,把胶带剥离即可得到光滑而均匀的导电薄膜形成一个梯度电阻元件3,参见图1。其中,该基板1可采用纸张、高分子材料、木材或玻璃制作而成,四片胶带围成的区域大小可为5
×
10mm2。梯度电阻元件3的材质与8b铅笔材质相关,可采用石墨烯、石墨粉、碳纳米管、导电炭黑粉、天然生物材料衍生的碳材料、无机导电材料、金属纳米线、金属纳米颗粒、金属材料或导电高分子材料,可以是其中的一种或多种混合。
55.1.2)重复步骤1.1)每次绘制次数不同即可得到多个不同电阻的梯度电阻元件3,并将若干个梯度电阻排列成预设的形状,例如包括7个梯度电阻元件3,参见图2。每次绘制次数不同,则导电材质的含量不同,从而使得电阻不同。每个梯度电阻元件3之间具有间隔,例如每个电阻元件之间相隔10mm。本实施例中,该预设形状为线形,即若干梯度电阻元件3沿直线排列。
56.1.3)采用银电路绘制笔在每个梯度电阻元件3两侧绘制第一导电膜2a。该步骤中,每个梯度电阻元件3之间的间隙可用银电路绘制笔进行多次绘制,使第一导电膜2a的电阻接近1 ω/cm,形成大小为2
×
10mm2的第一导电膜2a。
57.2)每个梯度电阻元件3两侧再分别制作第二导电膜2b,该两第二导电膜2b一端与对应的第一导电膜2a垂直并连接,另一端相对向内延伸且与梯度电阻平行,两第二导电膜2b之间具有间隙。该步骤中,可采用银电路绘制笔在每个梯度电阻元件3两侧再绘制第二导电膜 2b,形成两个2
×
4.5mm2的第二导电膜2b,保证两个第二导电膜2b之间有1mm的间隔,如图5、图6所示。
58.3)每个梯度电阻的两第二导电膜2b之间的间隙上方安装活动触摸按钮6,该活动触摸按钮6底端设有第三导电膜6a,活动触摸按钮6被触摸或按压时,该第三导电膜6a与对应的两第二导电膜2b连接使得对应的梯度电阻元件3短路。参见图7,该活动触摸按钮6的大小可以是10
×
10mm2,每个活动触摸按钮6上的第三导电膜6a大小可以是2
×
2mm2,该第三导电膜6a大小大于两第二导电膜2b之间的间隙,保证活动触摸按钮6被按下时,梯度电阻元件3能被短路。
59.具体的,在每个梯度电阻元件3中,第二导电膜2b另一端即与梯度电阻元件3平行的一端,其侧边设置垫片4以安装触摸按钮,该垫片4可以是双面胶,其厚度一般为0.16mm,参见图8、图9、图10。至此,制作而成的未封装的带有活动触摸按钮6的梯度电阻元件3 具有触摸功能,可以短路梯度电阻元件3中的电阻。
60.4)在预设形状两端的第一导电膜2a末端制作电极5。具体的,可在预设形状两端的第一导电膜2a末端用银漆引出电极5,通过电极5实现与终端的电路连接和信号传输,参见图 11。
61.本发明中,还包括采用盖板与基板1固定,则若干个梯度电阻元件3、第一导电膜2a和第二导电膜2b位于盖板和基板1之间,设置盖板防止无意触碰活动触摸按钮6导致的阻值变化。本发明中,盖板材质可与基板1相同,盖板与基板1之间可采用胶带粘贴固定。至此,将得到的触摸定位传感器置于平整的地方,即可通过触摸使其做出对应的功能。
62.本发明制作的触摸定位传感器,其所有梯度电阻元件3的响应阻值都是不同的且每一种情况对应于特定的阻值区间范围,因此,触摸定位传感器的响应阻值对应于不同位
置的触摸按钮和触摸按钮数量信息。如果终端接收到不同的阻值信号,则可以根据触摸定位传感器的响应阻值实现定位功能,判断出手指触摸在哪些位置。因此,终端可以根据所确定的电阻信号识别用户的准确命令,该信号代表一个固定的命令。
63.本发明还提出一种触摸定位传感器,采用上述的一种触摸定位传感器制作方法制作而成。
64.本发明的触摸定位传感器设有若干梯度电阻元件3,若干个活动触摸按钮6以及两电极5。该若干梯度电阻元件3阻值不同且间隔排列成预设形状(本实施例以线形为例),其数量可以根据情况需求进行增加和减少,制作成不同形状的结构适应实际场景,并且通过第一导电膜2a连接各个梯度电阻元件3,以及设置与第一导电膜2a连接的第二导电膜2b,活动触摸按钮 6安装于梯度电阻元件3的两第二导电膜2b之间的间隙上方,两电极5分别与线形排列的若干个梯度电阻元件3末端的两第一导电膜2a相连以实现电路连接和信号传输。
65.应用举例,将制作的触摸定位传感器使用胶带固定在桌面上,将两电极5与钢琴演奏的人机交互模块相连以检测手指按下的位置,当手指触摸活动触摸按钮6,人机交互模块即可发出对应的音色。
66.本发明相对于其它触摸定位传感器而言,具有制备方法简单、成本低廉、结构简单、电极数量少且消除了信号的串扰,防止了位置传感的干扰,大大降低了人机交互系统的系统配置要求等特点。该触摸定位传感器在触摸前后的转变状态的响应时间为《3ms,具有稳定性高、信号检测快速等优势。该触摸定位传感器可以平铺在桌面上,用于手指指尖触摸定位检测,也可以固定在手背处进行触摸定位检测。
67.实施例二
68.一种触摸定位传感器制作方法及触摸定位传感器,其主要特征与实施例一相同,区别在于:本实施例中,若干个梯度电阻元件3排列成弧形,则基板1和盖板可采用圆形。例如,包括5个梯度电阻元件3和5个活动触摸按钮6,参见图13,排列成圆弧。
69.该实施例的触摸定位传感器可放置于手背,且其电极可与无人机建立连接通信,当有手指触摸活动触摸按钮6,无人机可以根据活动触摸按钮6做出相应的指令。
70.实施例三
71.一种触摸定位传感器制作方法及触摸定位传感器,其主要特征与实施例一相同,区别在于:本实施例中,若干个梯度电阻元件3排列成s形。例如,参见图14,包括9个梯度电阻元件3和9个活动触摸按钮6。本实施例中,基板1和盖板可采用多边形,例如六边形。
72.该实施例的触摸定位传感器的9个按键可模拟数字键盘,通过动态按键识别,即可用于识别出按键人的身份。
73.上述仅为本发明的具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。