1.本发明涉及医用教学设备技术领域,特别是一种模拟动物急性肺损伤手术的装置。
背景技术:
2.在医学教育、药物研究等等领域中,常常需要采用白鼠一类的动物用来做各种实验及解剖、手术等等,所得的数据为治疗相关疾病提供理论数据支持等。在研究人体肺部疾病中,需要对动物进行模拟肺部损伤,然后对模拟患有肺部疾患的实验动物进行解剖手术等。
3.目前技术中模拟动物的肺部损伤中,一般是实验人员先为实验动物注射乙醚麻醉剂,然后通过空气经实验动物气管进入动物肺部内对肺部产生冲击,从而模拟出肺部损伤;还有一种方式是为动物肺部经气管注射损坏肺部的药液,进而也能模仿出肺部损伤。受到现有技术限制,目前实验人员为实验动物注射麻醉剂等时,由于没有一种有效的防护设备、麻醉剂容易挥发(口罩方式也无法有效防止吸入挥发的麻醉剂,且在室内温度高时配套口罩也会给实验人员带来不便),因此长期以往实验人员吸入麻醉剂会对身体健康带来不利影响。还有就是,现有技术一般是实验人员手动旋转固定夹等固定动物的四肢,此种方式旋紧、旋松固定夹由于需要实验人员手动操作,会给实验人员带来极大不便。最后就是,当模拟动物肺部损伤后,需要把动物摆放在另一个小型x机的探头下并调节检测的角度,此种方式也会给实验人员带来一定不便;并且相应实验人员对动物模拟肺损伤及解剖等过程无法传递到远端,其他技术人员(比如说实验人员的主管技术人员)不到现场无法实时了解到具体数据,也就不能给予实验人员技术指导,不利于提高相关实验人员的技能水平。
技术实现要素:
4.为了克服现有模拟动物的肺部损伤中,因无一种实用的设备存在如背景所述弊端,本发明提供了在相关机构及电路共同作用下,经电源开关控制方式实验人员能方便固定实验动物的四肢,且注射麻醉剂及肺部损伤药物时能在全密闭空间内进行,挥发的气体能及时经空气净化器处理后排出到室外,不会对实验人员的健康造成不利影响,远端人员能实时经视频了解现场实验人员的操作过程,并通过其他语音设备和实验人员进行交互对其操作过程予以指正,为提高实验人员相关技能起到了有力技术支持的一种模拟动物急性肺损伤手术的装置。
5.本发明解决其技术问题所采用的技术方案是:
6.一种模拟动物急性肺损伤手术的装置,包括底板、电动直线滑台、摄像机、照明灯、电磁阀、空压机、活动罩体、电源开关、gprs模块、x光机、负压抽气机、空气净化器、稳压电源;其特征在于还具有多套固定机构;所述电动直线滑台有多套,其中至少一套电动直线滑台垂直安装在底板的一侧端、且活动罩体外部一侧和电动直线滑台的滑动块安装在一起,其余一套电动直线滑台安装在活动罩体内上端,x光机的探测头安装在其余一套电动直线
滑台的滑动块下部,照明灯及摄像机安装在活动罩体内;所述活动箱体的两侧端分别安装有柔性手臂套管,手臂套管的外侧具有开口;所述每套固定机构包括电动推杆、固定板和夹口,夹口上端安装在电动推杆的下部,电动推杆和固定板安装在一起,多套固定机构的固定板下部分别焊接在底板的上端;所述电磁阀有多只,底板的下端安装有多只,多只连接管下端和多只电磁阀一端连接,其中两只电磁阀另一端和负压抽气机的进气管、空压机的排气管连接,负压抽气机的排气管和空气净化器的进气管连接;所述稳压电源、x光机的主机、电源开关、gprs模块安装在元件箱内;所述摄像机数据输出端口和gprs模块的信号输入端电性连接。
7.进一步对,所述底板的长宽度大于活动罩体的长宽度,底板的上端用胶粘接有密封垫。
8.进一步地,所述臂套管的外侧开口没有外力作用时处于叠合密封状态。
9.进一步地,所述电磁阀是常闭阀芯电磁阀。
10.进一步地,所述夹口的下端安装有保护垫。
11.本发明有益效果是:本发明应用中,实验人员通过电源开关等控制活动罩体上升高度,这样能方便将动物四肢经固定机构固定,活动罩体向下关闭后,实验人员两手可经罩体两侧端的橡胶管进入活动罩体内对动物进行麻醉注射或者往肺部注射药液、注入压缩空气等模拟动物肺部损伤,由于在密封环境注射各种液体,其挥发的气体会被负压抽气机抽出,因此减少了挥发气体对实验人员身体健康带来的不利影响。在实验中,实验人员可方便通过活动罩体内的x光机对动物进行x光透视了解肺部损伤的程度等,且整个实验的过程能经摄像机及gprs模块共同作用远传,远端人员能实时经视频了解现场实验人员的操作过程,并通过其他语音设备和实验人员进行交互对其操作过程予以指正,为提高实验人员相关技能起到了有力技术支持。基于上述,所以本发明具有好的应用前景。
附图说明
12.以下结合附图和实施例将本发明做进一步说明。
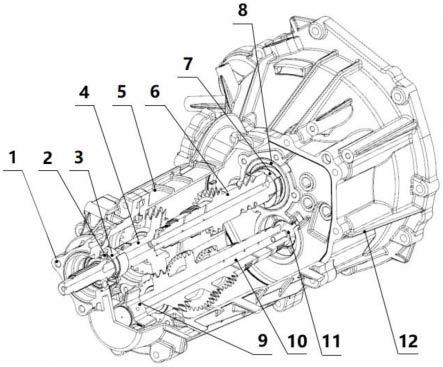
13.图1是本发明结构示意图。
14.图2是本发明电路图。
具体实施方式
15.图1、2中所示,一种模拟动物急性肺损伤手术的装置,包括底板1,电动直线滑台m及m1,具有rs485数据端口的小型摄像机sx,照明灯2,电磁阀31、32、33,小型空压机(图中未画出),矩形中空活动罩体4,电源开关5,gprs模块a2,小型x光机6,负压抽气机(图中未画出),空气净化器(图中未画出),稳压电源a1;还具有四套固定机构7;所述活动罩体4的下端为开放式结构,电动直线滑台有三套,其中两套电动直线滑台m垂直分布其外壳下端经螺杆螺母安装在底板1的后侧端左右两部,活动罩体4的后端左右两侧分别经螺杆螺母和其中两套电动直线滑台m的滑动块安装在一起,第三套电动直线滑台m1的外壳横向分布经螺杆螺母安装在活动罩体4内上端中部且其滑动块朝向下部,x光机6(主机位于活动罩体外侧端)经螺杆螺母安装在第三套电动直线滑台m1的滑动块下部,照明灯2及摄像机sx分别经螺杆螺母安装在活动罩体4内后中部上端;所述活动箱体4的左右两侧端分别具有一个开孔,两
个开孔外侧分别用胶粘接有一只柔性橡胶管8、且橡胶管8的内侧和活动罩体4内互通,两只橡胶管8的外侧为封闭式结构且横向各具有一个开口81;所述每套固定机构包括电动推杆m2、固定板71和下端为开放式结构的半圆弧形夹口72,夹口72上端中部焊接在电动推杆m2的活动杆下部,电动推杆m2垂直安装在固定板71前,四套固定机构的固定板71下部分别焊接在底板1的上端中部(前端两套、后端两套);所述电磁阀有三只,底板1的下左端及右端中间分别焊接有一只和底板内上部互通的连接管,两只连接管下端和其中两只电磁阀31及32一端经螺纹连接,第二只电磁阀32另一端和负压抽气机的进气管经软管连接,负压抽气机的排气管和空气净化器的进气管经软管连接;所述底板1的后端中部有个开孔,开孔内垂直焊接有一只分管,分管位于底板下端部分和第三只电磁阀33一端经螺纹连接,分管上端套有一只软管9,第三只电磁阀另一端和空压机的排气管经软管连接(空压机具有手动阀门能调节其空气输出流量);所述稳压电源a1、x光机的主机(显示界面和按键位于电控箱外)、电源开关5、gprs模块a2安装在元件箱10内电路板上,元件箱10安装在底板1右侧上。
16.图1、2中所示,底板1的长宽度大于活动罩体4的长宽度,底板1的上端用胶粘接有一只矩形中空胶垫、且胶垫的外径大于活动罩体4的外径,胶垫中部上端和活动罩体4的下端处于一个垂直面(活动罩体4下端和底板1上端接触后能防止活动罩体内的气体挥发)。两只橡胶管8的外侧开口在没有外力作用时处于叠合密封状态,开口81的横向内径略小于实验人员的手臂外径(实验人员手臂伸入活动罩体内时上臂被橡胶管密封,防止了罩体内的气体被实验人员呼吸到)。四套固定机构的电动推杆m2的左右间距及前后间距分别大于实验动物的左右侧及前后侧四肢的左右间距及前后间距。三只电磁阀31、32、33是工作电压直流12v、功率2w的常闭阀芯电磁阀。弧形夹口73的下端内用胶粘接有橡胶保护垫(对动物四肢起到稳定防滑作用)。稳压电源a1的电源输入端1及2脚、x光机6的电源输入端各经一只控制电源开关和交流220v电源两极分别经导线连接,稳压电源a1的电源输出端和八只电源开关5(s、s1、s2)的电源输入端及摄像机sx、gpr模块a2的电源输入端分别经导线连接,第一只电源开关s、第二只电源开关s1、第三只电源开关s2的各两路电源输出端1、4脚及5、6脚和其中两套电动直线滑台m、第三套电动直线滑台m1、四套固定机构的电动推杆m2正负及负正两极电源输入端分别经导线连接;第四只及第五只、第六只、第七只电源开关5的电源输出端和三只电磁阀31、32、33、照明灯h电源输入端分别经导线连接,摄像机sx数据输出端口和gprs模块a2的信号输入端经导线连接。
17.图1、2所示,220v交流电源输入端进入稳压电源a1的电源输入端后,稳压电源a1的电源输出端输出12v直流电源进入七只电源开关5(s、s1、s2)的电源输入端及摄像机sx、gpr模块a2的电源输入端。本发明应用中,实验人员先把电源开关s的手柄向左拨动,于是电源开关2、5脚和1、4脚分别连通,两套电动直线滑台m正负极得电其滑动块带动活动罩体4向上运动和底板1上端拉开间距,到合适距离后关闭电源开关s。然后实验人员把电源开关s2的手柄向左拨动,于是电源开关2、5脚和1、4脚分别连通,四套固定机构的电动推杆m2正负极得电其活动杆带动夹口72向上运动和底板拉开间距(到合适高度后关闭电源开关s2)。继之,实验人员把动物四肢分别调整摆放到四个夹口下端(可其他实验人员协同操作),实验人员把电源开关s2的手柄向右拨动,于是电源开关2、5脚和3、6脚分别连通,四套固定机构的电动推杆m2负正极得电其活动杆带动夹口72向下运动和底板接触,这样就能把动物固定在底板1上(此操作过程可在注射麻醉剂后再操作,固定动物四肢更为方便,到合适高度后
关闭电源开关s2)。继之,实验人员把电源开关s的手柄向右拨动,于是电源开关2、5脚和3、6脚分别连通,两套电动直线滑台m负正极得电其滑动块带动活动罩体4向下运动和底板1上端接触,到合适距离后关闭电源开关s。继之,实验人员两手可经罩体两侧端的橡胶管8开口进入活动罩体内对动物进行麻醉注射或者往肺部注射药液(注射针预先放在底板上)、注入压缩空气等模拟动物肺部损伤。注射麻醉剂或者往肺部注射药物时,实验人员预先打开两只电磁阀31及32及负压抽气机的电源开关,这样两只电磁阀31及32得电内部阀芯打开,负压抽气机得电后将后续注射时挥发的麻醉剂或注射药剂抽出,然后经空气净化器处理后无害化排出(电磁阀31得电后外界的空气能进入活动罩体4内,保证了活动罩体的空气流通不至于产生负压,使用完后关闭电源开关,由于在密封环境注射各种液体,其挥发的气体会被负压抽气机抽出,因此减少了挥发气体对实验人员身体健康带来的不利影响)。如果是通过肺部注入压缩空气模拟肺部损伤,工作人员预先打开第三只电磁阀33的电源开关,这样电磁阀33内部阀芯打开空压输出的压缩空气进入软管9内,实验人员将软管9插入实验动物的气管内就能通过压缩空气损伤动物的肺部,使用完后关闭电源开关。
18.图1、2所示,实验动物模拟完肺部损伤后(实验人员手离开罩体内),实验人员可打开x光机的电源,这样位于罩体内的x光机探头会采集动物的基于x光的肺部图像数据并经其显示界面显示。当需要调节x光机探头左或右运动有效对准动物的相关部位时,实验人员把电源开关s1的手柄向左或向右拨动,于是电源开关s1的2、5脚和3、6脚或者和1、4脚分别连通,电动直线滑台m2正负极或负正极得电其滑动块就会向左或向右带动x光机的探测头向左或向右运动,到合适距离后关闭电源开关s1。动物麻醉并模拟肺部损伤一段时间后,实验人员需要对动物进行解剖等时,通过电源开关s控制两套电动直线滑台m带动活动罩体上升高度,这样实验人员就可方便进行相应操作。实验完后,实验人员把电源开关s2的手柄向左拨动,于是电源开关2、5脚和1、4脚分别连通,四套固定机构的电动推杆m2正负极得电其活动杆带动夹口72向上运动和底板拉开间距,这样就能把动物取出完成全部实验过程(到合适高度后关闭电源开关s2)。本发明中,摄像机sx能实时采集实验人员对动物模拟肺部损伤或者实验过程,且摄像机sx采集的数据经gprs模块通过无线移动网络远传,远端技术人员通过智能手机或者pc机的相关软件应用接收到数据后,就能实时经视频了解现场实验人员的操作过程,并通过其他语音设备和实验人员进行交互对其操作过程予以指正,为提高实验人员相关技能起到了有力技术支持。实验人员根据环境照度需要可打开照明灯2的电源为整个过程起到照明作用。图1、2中,电动直线滑台m及m1是工作电压直流12v、功率50w的电动丝杠式电动直线滑台成品,滑动块行程50厘米;摄像机sx型号是ad-scam-xhl30;照明灯2是led照明灯、功率20w;电磁阀31、32、33是工作电压直流12v的常闭阀芯电磁阀;小型空压机工作电压交流220v、功率500w;负压抽气机是型号2xz-0.5(220v)的小型真空泵;活动罩体4是透明塑料材质;gprs模块a2型号是zlan8100,小型x光机6型号是blx-10的;空气净化器型号是kj500g-tb32。
19.以上显示和描述了本发明的基本原理和主要特征及本发明的优点,对于本领域技术人员而言,显然本发明限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
20.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。