1.本发明属于辅助驾驶领域,具体涉及一种自动驾驶车辆质量参数在线估计方法及装置。
背景技术:
2.整车质量对于整车动力性以及经济性有着重要的影响。设计一个有效的整车质量的估计算法可以更为精确的制定整车动力性以及经济性控制策略,同时对于未来无人驾驶汽车,也能辅助相关无人驾驶控制策略分析整车当前的内部状态以及外部道路状况。整车系统具有非线性的特点,对非线性系统进行状态量估计时,常用的思路都是首先对系统状态量非线性函数进行线性化,这个过程中可能存在强行线性逼近的过程。强行线性逼近会引入线性化误差,对于非线性较强的系统甚至可能会产生计算结果发散。这对于整车控制策略的应用是极为不利的。
技术实现要素:
3.本发明所要解决的技术问题在于针对上述现有技术存在的不足,提供一种自动驾驶车辆质量参数在线估计装置,包括:mcu,所述mcu具备can2.0通讯接口,能实现与整车的通讯功能,实现本发明软件方案。
4.本发明还提供一种自动驾驶车辆质量参数在线估计方法,包括:
5.步骤1:采集数据,采集数据包括车辆车速、发动机扭矩、油门踏板开度、手刹脚刹状态和当前挡位;
6.步骤2:建立车辆纵向动力学模型,基于已获得观测量基础上,预测k 1时刻状态估算量:
7.步骤3:根据车辆实时状态,预测状态估算量,建立雅可比矩阵,获得ekf增益量;
8.步骤4:确定车辆质量实时估计的启停条件与确定车辆质量实时估计的收敛时间。
9.步骤5:将采集到的车辆行驶状态数据和相关模型参数输入到mcu中,通过以下算式,求得实时车辆zk质量:
[0010][0011][0012][0013]
其中v为车辆行驶速度,1/m为车辆质量的倒数,β为汽车俯仰角,βμ为滚阻系数的
三角函数。
[0014]
作为优选,所述步骤1中,
[0015]
∑f=f
air
fg f
μ
g,
[0016][0017][0018]
其中,
[0019]
βμ为滚阻系数的三角函数,af为油门踏板开度,cd为当前挡位,g为发动机最小扭矩,f
μ
为滚阻力,f
air
为空气阻力,fg为加速度作用力,g为发动机额定扭矩,k为当前时刻,φ为状态估算量。
[0020]
作为优选,在所述步骤3中,所述ekf增益量算式为:kk=p
k-h
kt
(hkp
k-h
kt
v
krkvkt
)-1
。
[0021]
作为优选,在所述步骤1中包括:
[0022]
步骤11:本装置与整车can网络连接,采集车辆行驶时速度与当前加速度数据;
[0023]
步骤12:若无法获取车辆加速信号,则通过采集到的车速信号微分获取加速度参数。
[0024]
作为优选,在所述步骤4中,当车辆处于制动状态时需要暂停估算,启停条件为:制动压力》设定的制动压力阈值。
[0025]
作为优选,在所述步骤4中,当变速箱处于换挡过程中时需要暂停估算,启停条件为:换挡标志位为真。
[0026]
作为优选,在所述步骤4中,当车速低于一定值时需要暂停估算,启停条件为:当前车速《标定的车速阈值。
[0027]
作为优选,在所述步骤4中,当发动机扭矩低于一定值时需要暂停估算,启停条件为:发动机扭矩小于标定的阈值。
[0028]
作为优选,在所述步骤4中,当滤波后的发动机扭矩变化率高于一定值时需要暂停估算,启停条件为:滤波后的发动机扭矩变化率高于标定的阈值。
[0029]
作为优选,在所述步骤4中,当当前档位是空档或倒挡时需要暂停估算,启停条件为:当前档位为n档或者r档。
[0030]
本发明还提供一种自动驾驶车辆质量参数在线估计装置,包括mcu、处理器,其特征在于,所述mcu具备can2.0通讯接口,能实现与整车的通讯功能,所述处理器能实现上述任一项自动驾驶车辆质量参数在线估计方法。
[0031]
本发明带来的有益效果:
[0032]
1.本发明的技术方案结构简单、算法模型准确,质量估计启停条件设计合理,质量估计结果更快速,更准确。
[0033]
2.本发明技术方案不以质量与坡度为状态量,通过构建其变形函数,加快了质量
估计的收敛时间。
[0034]
3.本发明通过观测方程设计,只需要观测速度与加速度两个观测量,甚至加速度还可以通过速度微分实现,减少了传感器成本。
[0035]
4.本发明增加了质量估计的启停条件,能够在恶劣车辆行驶工况下与传感器本身出现偏差时,保证质量估计的准确性。
附图说明
[0036]
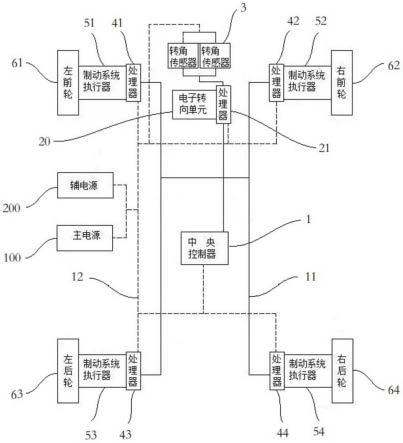
图1为本发明的所述的质量估计装置的硬件连接图。
[0037]
图2为本发明的具体流程图。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
如图1所示,本实施例提供一种自动驾驶车辆质量参数在线估计装置,包括:mcu,所述mcu具备can2.0通讯接口,能实现与整车的通讯功能,实现本发明软件方案。
[0040]
本发明还提供一种自动驾驶车辆质量参数在线估计方法,包括:
[0041]
步骤s1:采集数据;
[0042]
步骤s2:建立车辆纵向动力学模型,基于已获得观测量基础上,预测k 1时刻状态估算量:
[0043]
∑f=f
air
fg f
μ
g,
[0044][0045][0046]
其中,
[0047][0048]
β
μ
为滚阻系数的三角函数,af为油门踏板开度,cd为当前挡位,g为发动机最小扭矩,f
μ
为滚阻力,f
air
为空气阻力,fg为加速度作用力,g为发动机额定扭矩,k为当前时刻,φ为状态估算量。
[0049]
步骤s3:根据车辆实时状态,预测状态估算量,建立雅可比矩阵,获得ekf增益量,其中,所述ekf增益量计算公式为:kk=p
k-h
kt
(hkp
k-h
kt
v
krkvkt
)-1
。
[0050]
步骤s4:确定车辆质量实时估计的启停条件与确定车辆质量实时估计的收敛时间,其中,当车辆处于制动状态时需要暂停估算,启停条件为:制动压力》设定的制动压力阈
值;
[0051]
当变速箱处于换挡过程中时需要暂停估算,启停条件为:换挡标志位为真;
[0052]
当车速低于一定值时需要暂停估算,启停条件为:当前车速《标定的车速阈值;
[0053]
当发动机扭矩低于一定值时需要暂停估算,启停条件为:发动机扭矩小于标定的阈值;
[0054]
当滤波后的发动机扭矩变化率高于一定值时需要暂停估算,启停条件为:滤波后的发动机扭矩变化率高于标定的阈值;
[0055]
当当前档位是空档或倒挡时需要暂停估算,启停条件为:当前档位为n档或者r档。
[0056]
步骤s5:将采集到的车辆行驶状态数据和相关模型参数输入到mcu中,通过以下算式,求得实时车辆zk质量:
[0057][0058][0059][0060]
其中v为车辆行驶速度,1/m为车辆质量的倒数,β为汽车俯仰角,β
μ
为滚阻系数的三角函数。
[0061]
进一步地,所述步骤s1中采集数据包括括车辆车速、发动机扭矩、油门踏板开度、手刹脚刹状态和当前挡位。
[0062]
进一步地,在所述步骤s1中包括:
[0063]
步骤s11:本装置与整车can网络连接,采集车辆行驶时速度与当前加速度数据;
[0064]
步骤s12:若无法获取车辆加速信号,则通过采集到的车速信号微分获取加速度参数。
[0065]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。