1.本发明涉及沙漠治理领域,具体涉及一种挖培一体化植树机器人。
背景技术:
2.沙漠化是当今全世界人类共同面临的一个重大环境及社会问题。我国是世界上荒漠及荒漠化土地分布较广的国家,土地荒漠化和沙化问题仍是当前我国最为严重的生态问题之一。
3.为了解决沙漠化的问题,通常会采用机器人植树的方式,国外类似产品中,以加拿大团队研发的treerover挖培一体化植树机器人为代表,设计开发该植树机器人的设备结构复杂,成本偏高。国内开发的pix moving植树机器人成本高且体型庞大;有单位研发的植树机器人只具备钻孔单一功能,未能实现植树过程中挖培一体化的功能,缺少抱土及填土一体化的机械装置,抱土和压土需要分开独立工作。现有单独挖土机器人虽然挖土速度快,但落苗,培土(抱土及压土一体化)仍需人工手动完成,使得整体效率大打折扣,影响树苗栽培。
4.因此,为解决以上问题,需要一种挖培一体化植树机器人,用以解决上述问题。
技术实现要素:
5.有鉴于此,本技术方案的挖培一体化植树机器人能够实现挖培一体化的植树功能,采用齿轮系进行运动和力的传递,结构紧凑,托盘可同时携带多个载苗圆筒,保证了树苗的持续性投递;机器人前侧挖土,完成该动作后,行驶指定距离,由后侧装置完成落苗同时实现抱土及压土一体化动作,植树流程的连续性以及植树效率得到提高,装置自身体积较小,更加轻便灵活,提高空间利用率。
6.一种挖培一体化植树机器人,包括车体、安装于车体上的托盘机构、安装于托盘机构上的输苗导管、安装于车体前端的钻孔机构以及设置于车体上的培土机构;所述托盘机构用于将树苗循环运输至输苗导管内。
7.进一步,所述培土机构包括安装于车体上的第一输出电机、与第一输出电机配合使用的抱土装置以及与抱土装置配合使用的压土组件;所述抱土装置包括与第一输出电机配合使用的蜗杆、设置于蜗杆上的第一齿轮以及与蜗杆啮合传动的涡轮组件;所述第一齿轮转动带动压土组件运动,蜗杆转动带动涡轮组件进行抱土运动。
8.进一步,所述涡轮组件包括与蜗杆啮合传动的第一涡轮、第二涡轮、安装于第一涡轮上的第一抱土曲臂以及安装于第二涡轮上的第二抱土曲臂,所述第一涡轮和第二涡轮相对于蜗杆对称布置,所述第一抱土曲臂和第二抱土曲臂结构相同。
9.进一步,所述第一抱土曲臂包括上端与第一涡轮固定连接的上连接部、抱土连杆以及设置于抱土连杆下端的抱土曲块;所述上连接部与第一涡轮固定连接,抱土连杆上端与上连接部固定连接,抱土连杆下端与所述抱土曲块固定连接。
10.进一步,所述抱土曲块设置有弧形抱土面,所述抱土曲块上形成有加强肋板。
11.进一步,所述压土组件包括压土转轴、安装于压土转轴端部并与第一齿轮啮合传动的第二齿轮、设置于压土转轴上的第三齿轮以及配合第三齿轮使用的压土齿条;所述压土齿条与第三齿轮啮合传动,压土齿条下端固定连接设置有压土环,所述压土环设置于输苗导管正下方。
12.进一步,所述托盘机构包括安装于车体上的托盘、设置于托盘上的环形导轨、安装于环形导轨内的主动轮、从动轮以及传送齿带;所述主动轮和从动轮周向方向均设置有齿形结构,所述传送齿带外套于主动轮和从动轮上且传送齿带上开设有配合齿形结构进行啮合传动的传动齿。
13.进一步,所述传送齿带上均匀固定连接设置有多个载苗圆筒,所述托盘上开设有投放孔,所述投放孔设置于输苗导管正上方。
14.进一步,所述钻孔机构包括设置于托盘下的螺旋钻杆以及为螺旋钻杆提供输出动力的钻杆电机。
15.进一步,还包括设置于车体下方的行走机构;所述行走机构包括设置于车体上的第二输出电机、与第二输出电机配合使用的行走轮以及配合行走轮使用的履带。
16.本发明的有益效果是:本技术方案的挖培一体化植树机器人能够实现挖培一体化的植树功能,采用齿轮系进行运动和力的传递,结构紧凑,托盘可同时携带多个载苗圆筒,保证了树苗的持续性投递;机器人前侧挖土,完成该动作后,行驶指定距离,由后侧装置完成落苗同时实现对树苗培土(即抱土及压土一体化动作),植树流程的连续性以及植树效率得到提高,装置自身体积较小,更加轻便灵活,提高空间利用率。
附图说明
17.下面结合附图和实施例对本发明作进一步描述:
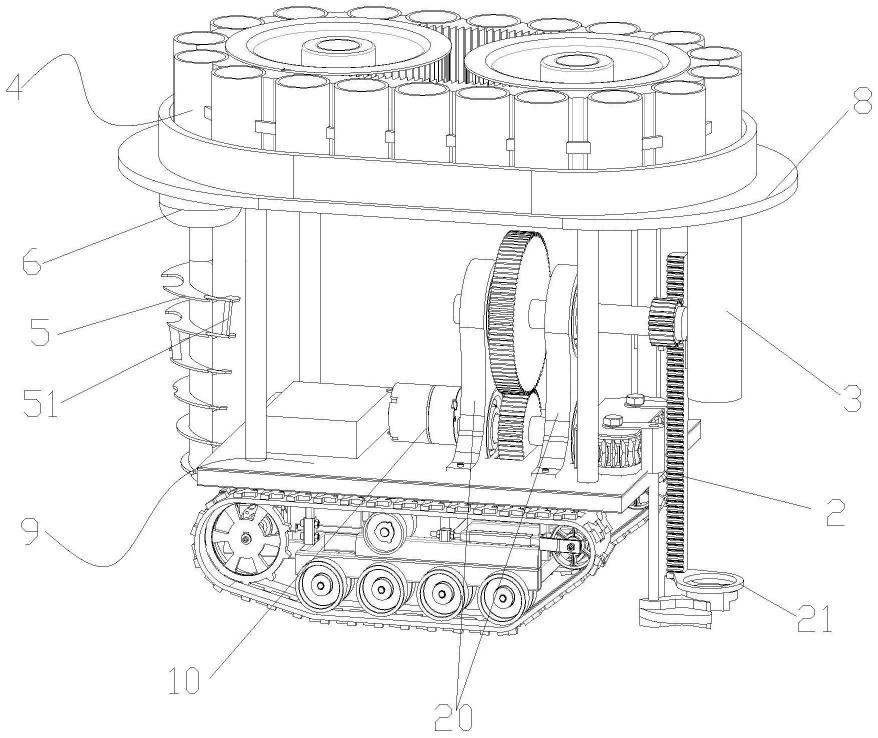
18.图1为本发明结构示意图;
19.图2为本发明侧视图;
20.图3为本发明培土机构结构示意图;
21.图4为本发明托盘机构结构示意图;
22.图5为本发明压土齿条安装示意图。
具体实施方式
23.图1为本发明结构示意图;图2为本发明侧视图;图3为本发明培土机构结构示意图;图4为本发明托盘机构结构示意图;图5为本发明压土齿条安装示意图;如图所示,一种挖培一体化植树机器人,包括车体9、安装于车体9上的托盘机构4、安装于托盘机构4上的输苗导管3、安装于车体9前端的钻孔机构以及设置于车体9上的培土机构;所述托盘机构4用于将树苗循环运输至输苗导管3内;本技术方案的挖培一体化植树机器人能够实现挖培一体化的植树功能,采用齿轮系进行运动和力的传递,结构紧凑,托盘可同时携带多个载苗圆筒,保证了树苗的持续性投递;机器人前侧挖土,完成该动作后,行驶指定距离,由后侧装置完成落苗同时实现抱土及压土一体化动作,植树流程的连续性以及植树效率得到提高,装置自身体积较小,更加轻便灵活,提高空间利用率。
24.本实施例中,所述培土机构包括安装于车体9上的第一输出电机10、与第一输出电
机10配合使用的抱土装置以及与抱土装置配合使用的压土组件;所述抱土装置包括与第一输出电机10配合使用的蜗杆14、设置于蜗杆14上的第一齿轮13以及与蜗杆14啮合传动的涡轮组件;所述第一齿轮13转动带动压土组件运动,蜗杆转动带动涡轮组件进行抱土运动。第一输出电机10固定设置于车体下表面,第一输出电机10为蜗杆14提供输出动力,第一输出电机10驱动蜗杆转动进而使涡轮组件转动,同时蜗杆转动带动压土组件同步实现压土运动。
25.本实施例中,所述涡轮组件包括与蜗杆14啮合传动的第一涡轮15、第二涡轮17、安装于第一涡轮15上的第一抱土曲臂16以及安装于第二涡轮17上的第二抱土曲臂,所述第一涡轮15和第二涡轮17相对于蜗杆14对称布置,所述第一抱土曲臂和第二抱土曲臂结构相同。第一涡轮和第二涡轮相对于蜗杆14对称布置,第一抱土曲臂和第二抱土曲臂结构相同分别与第一涡轮和第二涡轮进行固定连接,蜗杆转动带动第一抱土曲臂和第二抱土曲臂同时靠近抱土或者同时分离。
26.本实施例中,所述第一抱土曲臂16包括上端与第一涡轮固定连接的上连接部161、抱土连杆以及设置于抱土连杆下端的抱土曲块;所述上连接部161与第一涡轮15固定连接,抱土连杆上端与上连接部161固定连接,抱土连杆下端与所述抱土曲块固定连接。上连接部161包括上定位块和下定位块,通过螺栓将第一涡轮15与上、下定位块进行连接,上连接部161与抱土连杆以及抱土连杆与抱土曲块之间均采用固定连接的方式,第一涡轮15转动使抱土曲块同步转动。
27.本实施例中,所述抱土曲块设置有弧形抱土面163,所述抱土曲块上形成有加强肋板162。弧形抱土面163的设置便于形成对土壤的回报收集,加强肋板162设置于弧形抱土面163的背面,起到对弧形抱土面的加强支撑作用,确保抱土曲块抱土的性能。
28.本实施例中,所述压土组件包括压土转轴12、安装于压土转轴12端部并与第一齿轮啮13合传动的第二齿轮18、设置于压土转轴12上的第三齿轮19以及配合第三齿轮19使用的压土齿条2;所述压土齿条2与第三齿轮19啮合传动,压土齿条2下端固定连接设置有压土环21,所述压土环21设置于输苗导管3正下方。压土转轴12通过支撑架20安装于车体上,压土转轴12端部设置的第二齿轮18与第一齿轮13啮合传动,压土转轴12上设置的第三齿轮19与压土齿条2啮合传动,使得压土齿条2可沿竖直方向往复运动,压土齿条与托盘机构下方设置的齿条导轨29配合安装,车体上设置有导向滑轨30,导向滑轨30通过撑板31与齿条连接,齿条沿竖直方向运动时,撑板31在导向滑轨30内同步滑动。压土环21固定连接设置于压土齿条2下端,用于将弧形抱土面163抱土的土壤进行压实;在装置工作时,树苗从输苗导管3内落到指定位置后,抱土装置将树苗两侧的土壤进行抱土,同时压土组件开始同步运动,当抱土动作完成时,压土齿条2下端部的压土环21(压土环21为中间开孔的环形结构,用于对树苗周向方向土壤进行压紧)刚好完成压土动作,实现对树苗的培土(抱土及压土一体化)过程。
29.本实施例中,所述托盘机构4包括安装于车体9上的托盘8、设置于托盘8上的环形导轨26(环形导轨26和托盘可采用一体成型或者焊接加工的方式设置)、安装于环形导轨26内的主动轮25、从动轮27以及传送齿带28;所述主动轮25和从动轮27周向方向均设置有齿形结构,所述传送齿带28外套于主动轮25和从动轮27上且传送齿带28上开设有配合齿形结构进行啮合传动的传动齿。托盘8通过支撑架7安装于车体9上,托盘8上设置有环形导轨26,
车体9上设置有驱动主动轮25转动的第三输出电机(图中未画出),主动轮25和从动轮27结构相同均为柱状结构且主动轮25和从动轮27的外圆周上均开设有齿形结构,用于配合传送齿带28进行使用,传送齿带28内表面设置有传动齿,第三输出电机转动带动主动轮转动,主动轮25转动通过传送齿带28带动从动轮27转动。
30.本实施例中,所述传送齿带28上均匀固定连接设置有多个载苗圆筒24,所述托盘8上开设有投放孔,所述投放孔设置于输苗导管3正上方。传送齿带28内表面加工形成传动齿结构,传送齿带28外表面则加工形成连续的安装限位槽结构,用于配合载苗圆筒24进行限位安装,托盘8上开设有投放孔,当载苗圆筒24转动到投放孔上方时,树苗从载苗圆筒24投出通过投放孔进入到输苗导管3内,最终落到指定位置。
31.本实施例中,所述钻孔机构包括设置于托盘8下的螺旋钻杆5以及为螺旋钻杆提供输出动力的钻杆电机6。螺旋钻杆5上设置有螺旋加强板51,确保螺旋钻杆上端叶片安装连接稳定性能,钻杆电机6为螺旋钻杆5提供输出动力,螺旋钻杆5在车体前端用于钻出树苗栽培孔。
32.本实施例中,还包括设置于车体下方的行走机构;所述行走机构包括设置于车体上的第二输出电机22、与第二输出电机22配合使用的行走轮以及配合行走轮使用的履带23。当然,还包括安装于车体内部的电控系统,电控系统包含蓝牙模块、stm32单片机、电机驱动模块、降压模块、稳压模块、wifi模块等部分,用以实现挖培一体化植树机器人的自动化性能。实现挖土、行走、运苗、落苗、培土(抱土及压土一体化)、转向等规定动作自动化运行。
33.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
