技术特征:
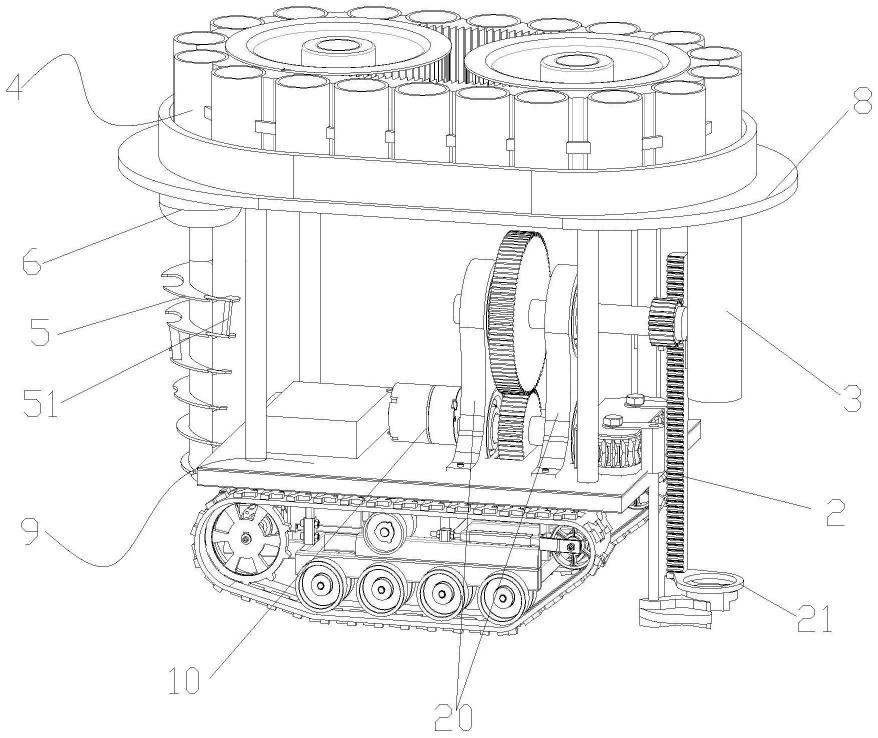
1.一种挖培一体化植树机器人,其特征在于:包括车体、安装于车体上的托盘机构、安装于托盘机构上的输苗导管、安装于车体前端的钻孔机构以及设置于车体上的培土机构;所述托盘机构用于将树苗循环运输至输苗导管内。2.根据权利要求1所述的挖培一体化植树机器人,其特征在于:所述培土机构包括安装于车体上的第一输出电机、与第一输出电机配合使用的抱土装置以及与抱土装置配合使用的压土组件;所述抱土装置包括与第一输出电机配合使用的蜗杆、设置于蜗杆上的第一齿轮以及与蜗杆啮合传动的涡轮组件;所述第一齿轮转动带动压土组件运动,蜗杆转动带动涡轮组件进行抱土运动。3.根据权利要求2所述的挖培一体化植树机器人,其特征在于:所述涡轮组件包括与蜗杆啮合传动的第一涡轮、第二涡轮、安装于第一涡轮上的第一抱土曲臂以及安装于第二涡轮上的第二抱土曲臂,所述第一涡轮和第二涡轮相对于蜗杆对称布置,所述第一抱土曲臂和第二抱土曲臂结构相同。4.根据权利要求3所述的挖培一体化植树机器人,其特征在于:所述第一抱土曲臂包括上端与第一涡轮固定连接的上连接部、抱土连杆以及设置于抱土连杆下端的抱土曲块;所述上连接部与第一涡轮固定连接,抱土连杆上端与上连接部固定连接,抱土连杆下端与所述抱土曲块固定连接。5.根据权利要求4所述的挖培一体化植树机器人,其特征在于:所述抱土曲块设置有弧形抱土面,所述抱土曲块上形成有加强肋板。6.根据权利要求2所述的挖培一体化植树机器人,其特征在于:所述压土组件包括压土转轴、安装于压土转轴端部并与第一齿轮啮合传动的第二齿轮、设置于压土转轴上的第三齿轮以及配合第三齿轮使用的压土齿条;所述压土齿条与第三齿轮啮合传动,压土齿条下端固定连接设置有压土环,所述压土环设置于输苗导管正下方。7.根据权利要求1所述的挖培一体化植树机器人,其特征在于:所述托盘机构包括安装于车体上的托盘、设置于托盘上的环形导轨、安装于环形导轨内的主动轮、从动轮以及传送齿带;所述主动轮和从动轮周向方向均设置有齿形结构,所述传送齿带外套于主动轮和从动轮上且传送齿带上开设有配合齿形结构进行啮合传动的传动齿。8.根据权利要求7所述的挖培一体化植树机器人,其特征在于:所述传送齿带上均匀固定连接设置有多个载苗圆筒,所述托盘上开设有投放孔,所述投放孔设置于输苗导管正上方。9.根据权利要求7所述的挖培一体化植树机器人,其特征在于:所述钻孔机构包括设置于托盘下的螺旋钻杆以及为螺旋钻杆提供输出动力的钻杆电机。10.根据权利要求1所述的挖培一体化植树机器人,其特征在于:还包括设置于车体下方的行走机构;所述行走机构包括设置于车体上的第二输出电机、与第二输出电机配合使用的行走轮以及配合行走轮使用的履带。
技术总结
本发明公开了一种挖培一体化植树机器人,包括车体、安装于车体上的托盘机构、安装于托盘机构上的输苗导管、安装于车体前端的钻孔机构以及设置于车体上的培土机构;所述托盘机构用于将树苗循环运输至输苗导管内;本技术方案的挖培一体化植树机器人能够实现挖培一体化的植树功能,采用齿轮系进行运动和力的传递,结构紧凑,托盘可同时携带多个载苗圆筒,保证了树苗的持续性投递;机器人前侧挖土,完成该动作后,行驶指定距离,由后侧装置完成落苗同时实现培土,植树流程的连续性以及植树效率得到提高,装置自身体积较小,更加轻便灵活,提高空间利用率。空间利用率。
技术研发人员:周欢 唐震宇 张力文 陈登茁 李嘉威 周登宇 曲嘉玮 孔诗瑞 杨曼樱
受保护的技术使用者:重庆交通大学
技术研发日:2022.06.17
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。