1.本实用新型属于蜂群无人机发射设备技术领域,具体涉及一种新型蜂群无人机发射装备。
背景技术:
2.近些年来,随着无人机技术的快速发展和无人机蜂群战术的提出以及热潮,专门针对微小型无人机的空中发射技术受到越来越多航空人和航空大国的持续关注。
3.目前,针对于蜂群无人机的发射设备研究很多,如公开号为cn214729762u的中国实用新型专利公开了一种新型车载蜂群无人机发射装备,利用液压系统和液压支柱,调整发射架的发射角度;此方案中,利用液压支柱的升降来抬升发射架一侧的高度,进而实现发射架倾角变化,但此方法调整角度范围存在局限性,而且不能直观地获得发射架角度的变化,进而容易导致发射角度受到限制,且发射角度不精准,影响无人机发射。
技术实现要素:
4.实用新型目的:为了解决上述问题,本实用新型提供了一种新型蜂群无人机发射装备。
5.技术方案: 一种新型蜂群无人机发射装备,包括底座,还包括:驱动组件,设于所述底座上;弧形转动件,传动连接于所述驱动组件;所述弧形转动件表面镌刻有刻度线;发射件,连接于所述弧形转动件;发射时,所述弧形转动件被设置转动预定角度进而带动发射件转动预定角度。
6.在进一步的实施例中,所述驱动组件包括:驱动电机,连接于所述驱动电机输出端的第一齿轮,以及至少两组设于所述驱动电机两侧的第二齿轮;
7.其中,所述第一齿轮和第二齿轮皆与所述弧形转动件传动连接。
8.通过采用上述技术方案,驱动电机带动第一齿轮转动,第一齿轮与弧形齿条啮合传动,带动弧形转动件转动;在弧形转动件转动的过程中,弧形转动件与第二齿轮啮合传动,保证了弧形转动件在转动时的稳定性。
9.在进一步的实施例中,所述弧形转动件下表面沿其自身弧度设有弧形齿条。
10.通过采用上述技术方案,通过弧形齿轮弧形转动件分别与第一齿轮、第二齿轮啮合传动,提高传动稳定性。
11.在进一步的实施例中,所述弧形转动件两端分别设有插头。
12.通过采用上述技术方案,插头用于插入发射件内,实现与发射件可拆卸连接。
13.在进一步的实施例中,所述发射件外表面设有与所述插头相适配的插孔。
14.通过采用上述技术方案,插头和插孔适配连接,在无人力外力作用下,弧形转动件与发射件连接稳定,发射件不会从弧形转动件上脱落。
15.在进一步的实施例中,所述发射件内部具有阵列排布的发射腔。
16.通过采用上述技术方案,发射件为发射箱,发射箱内阵列排布有若干发射腔,进而
实现蜂群发射无人机。
17.在进一步的实施例中,所述弧形转动件与发射件之间的腔体填充有缓冲层。
18.通过采用上述技术方案,缓冲层为橡胶或硅胶材料,对发射件转动或发射无人机过程中吸能减震,保持整个装置的稳定性。
19.有益效果:驱动电机驱动弧形转动件转动,进而弧形转动件带动发射件同步转动,进而实现发射件的发射口调整角度,发射口调整角度在0-180
°
范围内,增大了调整范围,提高了发射的灵活性;弧形转动件上的刻度可直观表示发射件的发射角度,提高了发射的精准度。
附图说明
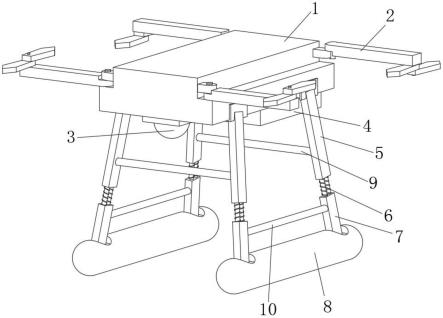
20.图1是本实用新型的结构示意图。
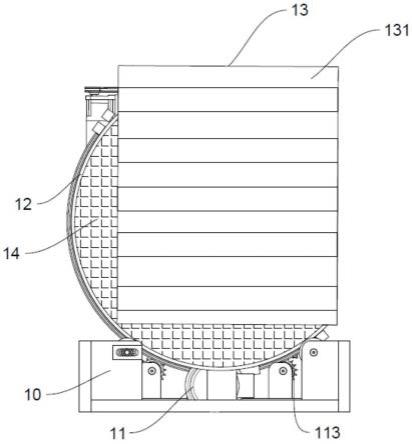
21.图2是本实用新型的局部结构示意图。
22.图3是弧形转动件的局部结构放大图。
23.图1至图3中各标注为:底座10、驱动组件11、驱动电机111、第一齿轮112、第二齿轮113、弧形转动件12、弧形齿条121、插头122、发射件13、发射腔131、缓冲层14。
具体实施方式
24.为了解决现有技术中存在的问题,申请人对现有各种方案进行了深入地分析,具体如下:
25.目前,针对于蜂群无人机的发射设备研究很多,如公开号为cn214729762u的中国实用新型专利公开了一种新型车载蜂群无人机发射装备,利用液压系统和液压支柱,调整发射架的发射角度;此方案中,利用液压支柱的升降来抬升发射架一侧的高度,进而实现发射架倾角变化,但此方法调整角度范围存在局限性,而且不能直观的获得发射架角度的变化,进而容易导致发射角度受到限制,且发射角度不精准,影响无人机发射。
26.为此申请人提出了以下解决方案,如图1至3所示,本实施例提供了一种新型蜂群无人机发射装备,包括底座10,驱动组件11,弧形转动件12,以及发射件13;驱动组件11安装在底座10上,弧形转动件12与驱动组件11传动连接,弧形转动件12为弧形轨或弧形杆,弧形转动件12表面如在侧面或上表面镌刻有刻度线,刻度线设为度数刻度线,在底座10上可观测的角度上设置初始标识,底座10上的初始标识与弧形转动件12的刻度线的始端向对应,用于显示发射件13的发射初始角度,在本实施例中,发射初始角度为0或者说发射初始角度与水平线平行;在弧形转动件12转动的过程中,初始标识指向刻度线当时所在的角度值时,来表示发射件13此时的角度。发射件13与弧形转动件12连接,采用可拆卸连接;发射时,驱动组件11驱动弧形转动件12转动预定角度,进而弧形转动件12带动发射件13转动,预定角度在0-180
°
范围内。在本实施例中,初始状态为图1所示,发射件13的两侧面与弧形转动件12的两端抵接,可采用卡接或其他连接方式,发射件13为发射箱,发射件13右侧为发射口,发射件13内部具有若干个阵列排布的发射腔131,无人机对应置于发射腔131,进而实现蜂群发射。利用弧形转动件12转动带动发射件13同步转动,可实现发射件13在0-180
°
范围内调节角度,发射角度调节灵活性更高,调节范围更广。
27.驱动组件11包括驱动电机111,第一齿轮112以及第二齿轮113;第一齿轮112与驱
动电机111的输出端连接,在本实施中第二齿轮113为两组,分别安装在驱动电机111的两侧,第一齿轮112和第二齿轮113都与弧形转动件12传动连接;弧形转动件12下表面沿其自身弧度设置有弧形齿条121,第一齿轮112、第二齿轮113与弧形转动件12为齿轮齿条传动;驱动电机111带动第一齿轮112转动,第一齿轮112与弧形齿条121啮合传动,带动弧形转动件12转动;在弧形转动件12转动的过程中,弧形转动件12与第二齿轮113啮合传动,保证了弧形转动件12在转动时的稳定性。
28.弧形转动件12两端分别设有插头122,发射件13外表面设有与插头122相适配的插孔,即发射件13与弧形转动件12通过插头122、插孔可拆卸连接,方便发射件13的更换;插孔与插头122适配连接,在弧形转动件12与发射件13连接时,保持插接结构稳定,发射件13在无人力的作用下,不会从弧形转动件12上脱落。弧形转动件12与发射件13之间的腔体填充有缓冲层14,缓冲层14为橡胶或硅胶材料,对发射件13转动或发射无人机过程中吸能减震,保持整个装置的稳定性。
29.工作原理如下:
30.启动驱动电机111,驱动电机111带动第一齿轮112转动,第一齿轮112与弧形齿条121啮合传动,进而带动弧形转动件12转动,进而弧形转动件12带动发射件13同步转动,进而实现发射件13的发射口调整角度,发射口调整角度在0-180
°
范围内,增大调整范围;弧形转动件12上的刻度可表示发射件13的发射角度;在弧形转动件12转动的过程中,弧形转动件12与第二齿轮113啮合传动,保证了弧形转动件12以及发射件13在转动时的稳定性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。