1.本发明涉及水质监测预警技术领域,具体为一种水质智能分析预警装置。
背景技术:
2.河流时常会因为沿途工业的偷排而受到污染,重要河流会设置若干水质监测点,但现在的水质监测一般都是进行取样然后分析样品进行污染判定,为了防止漏过污染物的情况,每个监测点都要在河流断面上进行多点取样,增加了分析工作量。
3.而且,多点取样分析后,并不能立即判断出河流中的污染物分布范围,还需要根据已经取样的位置点重新确定几处取样位置进一步分析确定该河流断面上最大污染物浓度位置,辅助判断污染物排放源,
4.并且,这样的预警系统不能实时反应河流中的污染情况,取样分析周期越长,污染的反应越不及时。
技术实现要素:
5.本发明的目的在于提供一种水质智能分析预警装置,以解决上述背景技术中提出的问题。
6.为了解决上述技术问题,本发明提供如下技术方案:
7.一种水质智能分析预警装置,预警装置包括两个预警浮体,每个预警浮体包括壳体、变形部、变形驱动,壳体水平两侧分别设置变形部,变形驱动设置在壳体内,变形驱动根据壳体两侧流体电导率改变变形部凸出程度,
8.从空中俯视设置到河道中的预警浮体时,以水来流方向为上:
9.位于左边的预警浮体中,预警浮体左侧电导率小于其右侧时,预警浮体的左侧变形部凸出程度高于右侧,
10.位于右边的预警浮体中,预警浮体左侧电导率小于其右侧时,预警浮体的左侧变形部凸出程度低于右侧。
11.两个预警浮体浮动设置到河道中,浮于水面之上,其可以通过牵拉绳索锚固到河底,预警浮体可以在绳索范围内左右晃动,两个浮体上分别带有变形部,壳体两侧的变形部变形程度不同时,水流从壳体两侧过流速度产生差异,从而让壳体可以受到水流作用力而进行垂直于水流方向的水平运动,两个浮体的变形部变形逻辑相反,位于右边的预警浮体会向右运动趋向河流中的高浓度区域,而位于左边的预警浮体会向左运动趋向河流中的低浓度区域,最终两个浮体的停留位置是:左边的浮体停留在该河流断面上的污染区左边界,而右边的浮体停留在污染区的最大浓度迹线上,由此通过两个浮体确定出污染区的左边界和中心线,显示出污染范围,如果河流中没有污染,则浮体不会进行垂直于河道的位移,预警浮体保持在该位置上,浮体的运动是在河流中实时进行的,有污染时造成浮体两侧电导率差异,浮体即进行迁移运动,可以及时进行水质变化的预警。
12.变形驱动包括永磁体、电磁铁、测阻电极,壳体内两侧设置容纳变形驱动的变形
腔,变形部隔开变形腔和外部水体,
13.永磁体磁极一端与变形部固定,永磁体另一端直对电磁铁,电磁铁通电并与永磁体产生斥力,测阻电极露出壳体外检测测点处水体在测阻电极间的电导率,在壳体的同一侧变形驱动中,测阻电极测得电导率越大,则调大电磁铁通入的电流,
14.壳体内两侧的变形驱动使用同一电压源。
15.同一电压源为电磁铁供电,壳体两侧水体电导率只要有微量差异,则两侧电磁铁分别对于永磁体的斥力不等,变形部的变形大小不同,从而形成两侧流速的微量差异,预警浮体开始进行垂直于水流的迁移,大部分的污染源都会使水体的电导率略微升高,所以,只要测阻电极识别微量电阻差,就会产生迁移力,不断累积位移,显示出低浓度污染物长时间作用下的污染范围。
16.变形部包括簧片和隔膜,隔膜沿壳体外部包围变形腔,簧片紧贴隔膜内表面,永磁体固定到簧片上。
17.簧片从内部撑开隔膜,防止永磁体直接抵住隔膜进行变形时,变形过于局部而不能达到调整侧方水流过流速度的目的。
18.壳体内还设有过水流道,壳体迎水段设置引流尖角,过水流道从引流尖角连接到壳体尾部,过水流道内设置轴线错心垂直于过水流道的转轮,转轮的转轴直接或间接传动设置一个转子磁体,转子磁体外设置定子线圈,定子线圈线头位置作为电压输出头,电压输出头为变形驱动的电压源。
19.壳体内构建一个流道引流一股水体进入壳体,河流中水前进过程过流转轮时,会推动其转动,转动的转轮带动转子磁体旋转,在定子线圈上产生感应电流,在电压输出头处输出一个电压v,这一电压v作为变形驱动内的电源。
20.变形驱动还包括三极管,三极管基极通过测阻电极连接至电压输出头正极,三极管集电极通过电磁铁连接到电压输出头正极,三极管发射极连接至电压输出头负极。
21.三极管放大测阻电极支路上的电流,在一侧测阻电极所感知到此侧水电导率高于另一侧时,该侧三极管上基极电流大于另一侧,从而该侧集电极上的电磁铁可以以更大的电流进行作业,反映到变形部上为更大的变形量,从而确保壳体可以识别左右两侧微量的电导率差异而进行变形,两侧流速差异推动壳体左右位移。
22.转轮和转子磁体之间还设有反速传动组件,反速传动组件在转轮转速升高时调小传动比。
23.转轮和转子磁体之间设置的反速传动组件用作变传动比传动,当转轮转速提高时,对应河道内水流速度变快,此时,如果还是以不变的转换率转换到电压输出头上,则相应变形部的变形量会更大,水流对于壳体垂直方向的推动更大,预警浮体位置变动过于快速或激烈后,会有较大的惯性力,预警浮体的位置变动就不会是全部因为壳体两侧水体电导率的微量差异而变动,而是因为一些外部因素,这是预警浮体位置变动所不期望的,所以在转轮和转子磁体之间加入了反速传动组件,水流流速变大时,调小传动比,为变形驱动提供更小的电压v,从而变形部变形量减小,较小的变形部变形配合速度变大的水流,能够提供壳体垂直于水流的迁移动力。
24.反速传动组件包括离心摆杆、配速套、中转齿轮组、转子齿轮、中轴,离心摆杆一端铰接到转轮输出轴端部,离心摆杆与转轮输出轴的铰接转动中心线垂直于转轮输出轴,离
心摆杆远离转轮的末端球铰链设置嵌合滚球,中轴与转轮输出轴共线并固定到壳体内的壁面上,
25.配速套有若干个并同心布置,配速套相互之间设置轴承并均转动安装到中轴上,配速套靠近离心摆杆的一端轴向延伸并在端部圆环端面上设置嵌合隘口,配速套远离离心摆杆的一端径向设置选速齿轮,同一个配速套上:嵌合隘口径向位置越大,选速齿轮中心圆半径越小,
26.嵌合隘口处于嵌合滚球运动所形成的空间球面上,
27.中转齿轮组设置在配速套的一旁,中转齿轮组轴线与中轴轴线平行,中转齿轮组上具有与配速套相同数量的输入齿轮和一个输出齿轮,输入齿轮分别与选速齿轮啮合,转子齿轮固定到转子磁体的一端,转子齿轮转动安装到中轴上,转子齿轮与输出齿轮啮合。
28.离心摆杆随转轮转动,转速越快,嵌合滚球越期望处于更大的径向位置上,嵌合滚球挑选与其离心力相匹配的嵌合隘口嵌入然后带动该配速套转动,如果离心力变大,则嵌合滚球具有更大离心力而越过该嵌合隘口嵌入后一个更大径向位置的嵌合隘口内,配速套上嵌合隘口径向位置越大,其另一端的选速齿轮半径更小,向后以更小的传动比进行传动。
29.两个预警浮体之间设置恒定弹力的弹性件。
30.预警浮体可以识别污染区边界,在污染消除后,每个预警浮体两侧的水电导率完全一致,预警浮体不再进行位置迁移,保持位置的预警浮体可以用作污染区历史记录,当然也可以设置弹性件使其有一个复位趋势,只要污染消除后,两个预警浮体之间会被弹力牵拉靠近,及时反应污染的去除,弹性件的弹力不能大,不能盖过变形部变形后引起的壳体两侧水压迁移动力,恒定弹力可以使用例如发条弹簧来构建,发条弹簧设置在一个预警浮体内,牵拉出发条弹簧的一个线头连接到另一个预警浮体上。
31.与现有技术相比,本发明所达到的有益效果是:本发明通过双浮体设置到河道中来检测污染物范围,不直接检测水体是否达到污染界线,而是检测预警浮体水平两侧的水体电导率差异并进行放大,调整变形部变形量,从而获得一个趋向污染区边界迹线的浮体和一个趋向污染区中心迹线的浮体,为监测人员提供污染范围的预警划定,预警实时进行,不受取样分析周期的限制,
32.浮体的水平迁移力来自于两侧的水体压力差,与水流速度相关,而内部部件的供能来自于过流水体推动转轮转动进行的感生电,所以,加入反速传动组件后,转轮转速的升高会降低其前往转子磁体的传动比,减小电压输出头的输出电压,从而减小变形部的变形程度,结合水流速升高的情况,实现浮体在识别到两侧电导率差异后的水平迁移力稳定。
附图说明
33.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
34.图1是本发明在使用位置的设置示意图;
35.图2是本发明预警浮体的受力示意图;
36.图3是俯视视角下本发明壳体内剖切示意图;
37.图4是本发明预警浮体水平方向示意图;
38.图5是本发明转轮至电压输出头之间的基础结构示意图;
39.图6是本发明变形驱动的电路原理图;
40.图7是本发明转轮与转子磁体之间设置反速传动组件后的结构示意图;
41.图8是图7中的视图a-a;
42.图中:1-壳体、11-过水流道、12-变形腔、13-转轮、14-转子磁体、15-定子线圈、16-电压输出头、2-变形部、21-簧片、22-隔膜、3-变形驱动、31-永磁体、32-电磁铁、33-三极管、34-测阻电极、4-反速传动组件、41-离心摆杆、411-嵌合滚球、42-配速套、421-嵌合隘口、422-选速齿轮、43-中转齿轮组、431-输入齿轮、432-输出齿轮、44-转子齿轮、45-中轴。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.请参阅图1-图8,本发明提供技术方案:
45.一种水质智能分析预警装置,预警装置包括两个预警浮体,每个预警浮体包括壳体1、变形部2、变形驱动3,壳体1水平两侧分别设置变形部2,变形驱动3设置在壳体1内,变形驱动3根据壳体1两侧流体电导率改变变形部2凸出程度,
46.从空中俯视设置到河道中的预警浮体时,以水来流方向为上:
47.位于左边的预警浮体中,预警浮体左侧电导率小于其右侧时,预警浮体的左侧变形部2凸出程度高于右侧,
48.位于右边的预警浮体中,预警浮体左侧电导率小于其右侧时,预警浮体的左侧变形部2凸出程度低于右侧。
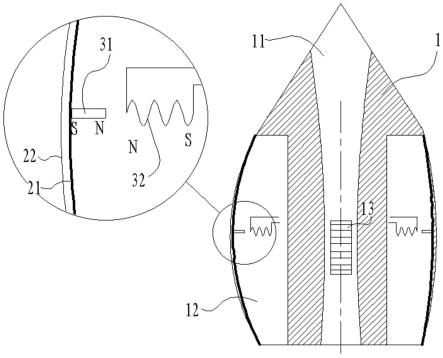
49.如图1、2所示,两个预警浮体浮动设置到河道中,浮于水面之上,其可以通过牵拉绳索锚固到河底,预警浮体可以在绳索范围内左右晃动,两个浮体上分别带有变形部2,壳体1两侧的变形部2变形程度不同时,水流从壳体1两侧过流速度产生差异,从而让壳体1可以受到水流作用力而进行垂直于水流方向的水平运动,两个浮体的变形部2变形逻辑相反,位于右边的预警浮体会向右运动趋向河流中的高浓度区域,而位于左边的预警浮体会向左运动趋向河流中的低浓度区域,最终两个浮体的停留位置是:左边的浮体停留在该河流断面上的污染区左边界,而右边的浮体停留在污染区的最大浓度迹线上,由此通过两个浮体确定出污染区的左边界和中心线,显示出污染范围,如果河流中没有污染,则浮体不会进行垂直于河道的位移,预警浮体保持在该位置上。
50.变形驱动3包括永磁体31、电磁铁32、测阻电极34,壳体1内两侧设置容纳变形驱动3的变形腔12,变形部2隔开变形腔12和外部水体,
51.永磁体31磁极一端与变形部2固定,永磁体31另一端直对电磁铁32,电磁铁32通电并与永磁体31产生斥力,测阻电极34露出壳体1外检测测点处水体在测阻电极34间的电导率,在壳体1的同一侧变形驱动3中,测阻电极34测得电导率越大,则调大电磁铁32通入的电流,
52.壳体1内两侧的变形驱动3使用同一电压源。
53.同一电压源为电磁铁32供电,壳体1两侧水体电导率只要有微量差异,则两侧电磁
铁32分别对于永磁体31的斥力不等,变形部2的变形大小不同,从而形成两侧流速的微量差异,预警浮体开始进行垂直于水流的迁移,大部分的污染源都会使水体的电导率略微升高,所以,只要测阻电极34识别微量电阻差,就会产生迁移力,不断累积位移,显示出低浓度污染物长时间作用下的污染范围。
54.变形部2包括簧片21和隔膜22,隔膜22沿壳体1外部包围变形腔12,簧片21紧贴隔膜22内表面,永磁体31固定到簧片21上。
55.如图3所示,簧片21从内部撑开隔膜22,防止永磁体31直接抵住隔膜21进行变形时,变形过于局部而不能达到调整侧方水流过流速度的目的。
56.壳体1内还设有过水流道11,壳体1迎水段设置引流尖角,过水流道11从引流尖角连接到壳体1尾部,过水流道11内设置轴线错心垂直于过水流道11的转轮13,转轮13的转轴直接或间接传动设置一个转子磁体14,转子磁体14外设置定子线圈15,定子线圈15线头位置作为电压输出头16,电压输出头16为变形驱动3的电压源。
57.如图2~5所示,壳体1内构建一个流道引流一股水体进入壳体1,河流中水前进过程过流转轮13时,会推动其转动,转动的转轮13带动转子磁体14旋转,在定子线圈15上产生感应电流,在电压输出头16处输出一个电压v,这一电压v作为变形驱动3内的电源。
58.变形驱动3还包括三极管33,三极管33基极通过测阻电极34连接至电压输出头16正极,三极管33集电极通过电磁铁32连接到电压输出头16正极,三极管33发射极连接至电压输出头16负极。
59.如图6所示,三极管33放大测阻电极34支路上的电流,在一侧测阻电极34所感知到此侧水电导率高于另一侧时,该侧三极管33上基极电流大于另一侧,从而该侧集电极上的电磁铁32可以以更大的电流进行作业,反映到变形部2上为更大的变形量,从而确保壳体1可以识别左右两侧微量的电导率差异而进行变形,两侧流速差异推动壳体1左右位移。
60.转轮13和转子磁体14之间还设有反速传动组件4,反速传动组件4在转轮13转速升高时调小传动比。
61.如图7所示,转轮13和转子磁体14之间设置的反速传动组件4用作变传动比传动,当转轮13转速提高时,对应河道内水流速度变快,此时,如果还是以不变的转换率转换到电压输出头16上,则相应变形部2的变形量会更大,水流对于壳体1垂直方向的推动更大,预警浮体位置变动过于快速或激烈后,会有较大的惯性力,预警浮体的位置变动就不会是全部因为壳体1两侧水体电导率的微量差异而变动,而是因为一些外部因素,这是预警浮体位置变动所不期望的,所以在转轮13和转子磁体14之间加入了反速传动组件4,水流流速变大时,调小传动比,为变形驱动3提供更小的电压v,从而变形部2变形量减小,较小的变形部2变形配合速度变大的水流,能够提供壳体垂直于水流的迁移动力。
62.反速传动组件4包括离心摆杆41、配速套42、中转齿轮组43、转子齿轮44、中轴45,离心摆杆41一端铰接到转轮13输出轴端部,离心摆杆41与转轮13输出轴的铰接转动中心线垂直于转轮13输出轴,离心摆杆41远离转轮13的末端球铰链设置嵌合滚球411,中轴45与转轮13输出轴共线并固定到壳体1内的壁面上,
63.配速套42有若干个并同心布置,配速套42相互之间设置轴承并均转动安装到中轴45上,配速套42靠近离心摆杆41的一端轴向延伸并在端部圆环端面上设置嵌合隘口421,配速套42远离离心摆杆41的一端径向设置选速齿轮422,同一个配速套42上:嵌合隘口421径
向位置越大,选速齿轮422中心圆半径越小,
64.嵌合隘口421处于嵌合滚球411运动所形成的空间球面上,
65.中转齿轮组43设置在配速套42的一旁,中转齿轮组43轴线与中轴45轴线平行,中转齿轮组43上具有与配速套42相同数量的输入齿轮431和一个输出齿轮432,输入齿轮431分别与选速齿轮422啮合,转子齿轮44固定到转子磁体14的一端,转子齿轮44转动安装到中轴45上,转子齿轮44与输出齿轮432啮合。
66.如图7、8所示,离心摆杆41随转轮13转动,转速越快,嵌合滚球411越期望处于更大的径向位置上,嵌合滚球411挑选与其离心力相匹配的嵌合隘口421嵌入然后带动该配速套42转动,如果离心力变大,则嵌合滚球411具有更大离心力而越过该嵌合隘口421嵌入后一个更大径向位置的嵌合隘口421内,配速套42上嵌合隘口421径向位置越大,其另一端的选速齿轮422半径更小,向后以更小的传动比进行传动。
67.两个预警浮体之间设置恒定弹力的弹性件。
68.如图1所示,预警浮体可以识别污染区边界,在污染消除后,每个预警浮体两侧的水电导率完全一致,预警浮体不再进行位置迁移,保持位置的预警浮体可以用作污染区历史记录,当然也可以设置弹性件使其有一个复位趋势,只要污染消除后,两个预警浮体之间会被弹力牵拉靠近,及时反应污染的去除,弹性件的弹力不能大,不能盖过变形部2变形后引起的壳体1两侧水压迁移动力,恒定弹力可以使用例如发条弹簧来构建,发条弹簧设置在一个预警浮体内,牵拉出发条弹簧的一个线头连接到另一个预警浮体上。
69.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
70.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。