技术特征:
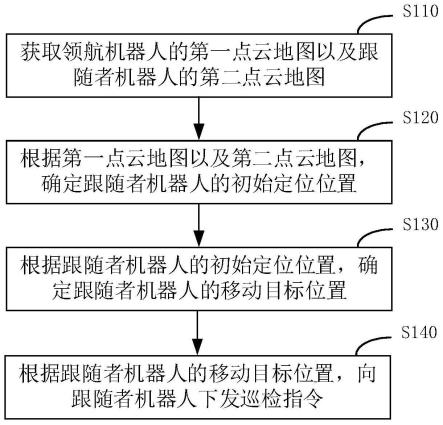
1.一种机器人集群巡检方法,其特征在于,包括:获取领航机器人的第一点云地图以及跟随者机器人的第二点云地图;根据所述第一点云地图以及所述第二点云地图,确定所述跟随者机器人的初始定位位置;根据所述跟随者机器人的初始定位位置,确定所述跟随者机器人的移动目标位置;根据所述跟随者机器人的移动目标位置,向所述跟随者机器人下发巡检指令。2.根据权利要求1所述的方法,其特征在于,所述获取领航机器人的第一点云地图以及跟随者机器人的第二点云地图,包括:获取所述领航机器人的第一机器位姿数据以及第一传感器采集数据;根据第一机器位姿数据以及第一传感器采集数据,生成所述第一点云地图;获取所述跟随者机器人的第二机器位姿数据以及第二传感器采集数据;根据所述第二机器位姿数据以及所述第二传感器采集数据,生成所述第二点云地图。3.根据权利要求2所述的方法,其特征在于,所述根据所述第一点云地图以及所述第二点云地图,确定所述跟随者机器人的初始定位位置,包括:将所述第一点云地图以及所述第二点云地图进行地面滤波处理,得到第一去噪点云地图以及第二去噪点云地图;分别对所述第一去噪点云地图以及所述第二去噪点云地图进行关键点探测,得到第一局部关键特征以及第二局部关键特征;根据所述第一局部关键特征以及所述第二局部关键特征,确定所述跟随者机器人的初始定位位置。4.根据权利要求3所述的方法,其特征在于,在所述根据所述跟随者机器人的初始定位位置,确定所述跟随者机器人的移动目标位置之前,还包括:在所述领航机器人与所述跟随者机器人通视时,获取所述领航机器人的第一当前靶标以及所述跟随者机器人的第二当前靶标,并根据所述第一当前靶标以及所述第二当前靶标,调整所述跟随者机器人与所述领航机器人的相对位姿;在所述领航机器人与所述跟随者机器人不通视时,根据所述第一点云地图以及所述第二点云地图,调整所述跟随者机器人与所述领航机器人的相对位姿。5.根据权利要求1中所述的方法,其特征在于,在所述获取领航机器人的第一点云地图之后,还包括:获取所述领航机器人的靶标地图,并将所述靶标地图中的靶标统一到目标坐标系下,得到修正行动轨迹;根据所述领航机器人的修正行动轨迹,修正所述领航机器人的位姿。6.根据权利要求1所述的方法,其特征在于,还包括:获取所述跟随者机器人的机器人编号;在目标跟随者机器人无法根据所述巡检指令移动到所述移动目标位置时,根据所述目标跟随者机器人的机器人编号,向所述目标跟随者机器人下发手动操作指令。7.一种机器人集群巡检系统,包括领航机器人、至少一个跟随者机器人以及中央处理器,其中,所述领航机器人,用于获取第一机器位姿数据以及第一传感器采集数据;
所述跟随者机器人,用于获取第二机器位姿数据以及第二传感器采集数据;所述中央处理器,用于根据所述第一机器位姿数据以及所述第一传感器采集数据,得到第一点云地图,并根据所述第二机器位姿数据以及所述第二传感器采集数据,得到第二点云地图;根据所述第一点云地图以及所述第二点云地图,确定所述跟随者机器人的初始定位位置;根据所述跟随者机器人的初始定位位置,确定所述跟随者机器人的移动目标位置;根据所述跟随者机器人的移动目标位置,向所述跟随者机器人下发巡检指令。8.一种机器人集群巡检装置,其特征在于,包括:点云地图获取模块,用于获取领航机器人的第一点云地图以及跟随者机器人的第二点云地图;初始定位位置确定模块,用于根据所述第一点云地图以及所述第二点云地图,确定所述跟随者机器人的初始定位位置;移动目标位置确定模块,用于根据所述跟随者机器人的初始定位位置,确定所述跟随者机器人的移动目标位置;巡检指令下发模块,用于根据所述跟随者机器人的移动目标位置,向所述跟随者机器人下发巡检指令。9.一种电子设备,其特征在于,所述电子设备包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-7中任一项所述的机器人集群巡检方法。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的机器人集群巡检方法。
技术总结
本发明公开了一种机器人集群巡检方法、系统、装置、设备及介质。机器人集群巡检方法,包括:获取领航机器人的第一点云地图以及跟随者机器人的第二点云地图;根据第一点云地图以及第二点云地图,确定跟随者机器人的初始定位位置;根据跟随者机器人的初始定位位置,确定跟随者机器人的移动目标位置;根据跟随者机器人的移动目标位置,向跟随者机器人下发巡检指令。本发明实施例能够基于巡检机器人完成复杂巡检任务,并保证巡检机器人的高精度协作,还可以提升巡检效率,降低巡检失误。降低巡检失误。降低巡检失误。
技术研发人员:杨帆 乔嘉赓 彭子平 易淑智 谭紫云 吴兰 贾恒杰 柳景斌
受保护的技术使用者:广东电网有限责任公司韶关供电局
技术研发日:2022.06.15
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。