1.本发明涉及技术领域,尤其涉及一种液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法。
背景技术:
2.随着军工产品和民用工业的发展,对于液压位置伺服系统的要求越来越高。液压位置伺服系统不仅需要能够快速动作,并且精度要求也越来越高。为了更好地对液压位置伺服系统进行分析和控制,需要给液压位置伺服系统建立相应的数学模型,同时辨识所建立模型的参数和时间延迟。经过几十年计算机技术的发展,开发了许多辨识方法,例如遗传算法、蚁群算法和鲸鱼优化算法。遗传算法具有较强的全局搜索能力,但该算法局部搜索能力较弱,往往只能得到次优解。蚁群算法收敛速度快,但需设置的参数多且搜索随机性大,导致在实际生产中不能达到令人满意的辨识效果;鲸鱼算法能够在单目标优化问题上表现不错,但这种方法在多目标搜索上的效果差强人意,而且易陷入局部最优,导致数值估计误差较大。
技术实现要素:
3.本发明的目的在于提供一种液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法,本发明提出的液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法是一种群智能优化算法,它具有更快的收敛速度和更高的收敛精度,能较好地适用于对液压位置伺服系统的参数辨识。
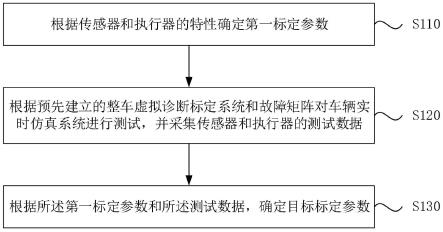
4.为了实现上述发明目的,本发明采用技术方案具体为:一种液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法,具体包括以下步骤:
5.步骤1)构建液压位置伺服系统的时滞反馈非线性辨识模型。
6.步骤2)构建液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法的辨识流程。
7.第一步:初始化麻雀搜索算法,采用改进的circle混沌映射初始化麻雀种群;
8.第二步:收集液压位置伺服系统的给定电压信号作为输入数据,液压位置伺服系统的负载位移数据作为输出数据;
9.第三步:计算麻雀群体中个体适应度,对所有麻雀个体适应度进行排序,找出全局最优适应度值和全局最差适应度值,然后计算初始全局最优位置;
10.第四步:令迭代变量k=1,计算麻雀的初始位置;
11.第五步:基于线性递减权重法计算当前的惯性权重值,更新发现者位置;
12.第六步:更新跟随者的位置;
13.第七步:更新警戒者的位置;
14.第八步:计算麻雀种群适应度并进行重新排序,更新麻雀种群位置;
15.第九步:对于所有麻雀,计算群体最佳麻雀位置;
16.第十步:从群体最佳位置中分离提取出参数向量和时延的估计值;
17.第十一步:将迭代变量k值加1,重复上述过程。
18.作为本发明提供的基于改进circle混沌线性变权麻雀搜索算法的液压位置伺服系统时滞反馈非线性模型辨识方法进一步优化方案,所述步骤1)的具体建模步骤如下:
19.(1-1)构建液压位置伺服系统的时滞反馈非线性模型:
[0020][0021][0022][0023][0024]
其中,r(t)为输入量,y(t)为输出量,为反馈通道输出,v(t)是一个均值为零、方差为σ2满足高斯分布的白噪声;定义x(t),u(t)和w(t)为不可测的中间变量;τ是反馈非线性系统时滞,z为后移算子:z-1
y(t)=y(t-1),a(z),b(z)是关于z的多项式,描述为如下形式:
[0025][0026][0027]
将系统的非线性部分可以用传递函数表示为:
[0028][0029]
其中,未知参数γi(i=1,2,...,m)是非线性函数的系数,m是非线性块的参数个数。
[0030]
将公式两边同乘以a(z)得到:
[0031]
a(z)y(t)=q-τ
b(z)u(t) v(t)
ꢀꢀꢀꢀ
(8)
[0032]
可表示为:
[0033][0034]
其中噪声模型输出w(t)和前馈通道输出x(t)为:
[0035][0036][0037]
反馈非线性系统模型可以表示为:
[0038][0039]
(1-2)将线性子系统的参数向量a、b以及非线性部分的参数向量γ定义为:
[0040][0041]
那么整个模型的参数向量θ表示为:
[0042][0043]
对应的信息向量表示为:
[0044][0045][0046]
其中:
[0047][0048][0049][0050]
其中:
[0051]
f(y(t))=[f1(y(t)),f2(y(t)),...,fm(y(t))]∈r1×m[0052]
根据上述定义,系统的非线性部分表示为:
[0053][0054]
(1-3)然后我们得到描述的液压位置伺服系统的时滞反馈非线性模型:
[0055][0056]
然后我们得到液压位置伺服系统的时滞反馈非线性模型为:
[0057][0058]
作为本发明提供的液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法的进一步优化方案,所述步骤2)构建液压位置伺服系统改进混沌变权麻雀搜索参数辨识流程的具体步骤如下:
[0059]
(2-1)设置麻雀个数为n,每个麻雀包含na nb m个变量,通过(18),采用改进的circle混沌映射初始化麻雀种群。设置xn为当前麻雀的位置,x
n 1
为更新后的麻雀位置,最大迭代次数为t、预警值为st、发现者pd和警戒者sd比例及w
max
、w
min
,wk为惯性权重,w
max
和w
min
分别为线性权重的最大值和最小值。
[0060]
原circle混沌映射表达式为:
[0061][0062]
改进之后的circle混沌映射表达式为:
[0063][0064]
(2-2)收集液压位置伺服系统的给定电压信号输入数据和负载位移输出数据{r(t),y(t)}。构造形式输出堆积向量y(l)如下式(19):
[0065]
y(l)=[y(l),y(l-1),...,y(1)]
t
∈r
l
ꢀꢀꢀꢀꢀꢀꢀ
(19)
[0066]
构造ψ(l,τ)为信息堆积向量如式(20):
[0067][0068]
其中,l为数据长度。
[0069]
(2-3)通过(21)计算麻雀群体中个体适应度,对所有麻雀个体适应度进行排序,找出全局最优适应度值fg和全局最差适应度值fw,然后通过(22)计算初始全局最优位置
[0070][0071][0072]
(2-4)设迭代变量k=1,开始迭代,个体的初始位置是
[0073][0074]
(2-5)基于线性递减权重法通过(24)计算wk,通过式子(25)将发现者位置更新为
[0075][0076][0077]
其中,k为迭代变量;表示在第k代中第i只麻雀在第j维的位置,随机数ξ∈[0,1],为第k代种群全局最优适应度,q是服从正态分布的随机数,l是一个每个元素均为1的1
×
d维的矩阵;r2表示报警值,st表示安全阈值。
[0078]
(2-6)根据(26)更新跟随者位置
[0079][0080]
其中,表示第k代适应度值最差的个体位置,表示第k 1代中适应度最佳的个体位置。a表示1
×
d的矩阵,矩阵中每个元素预设为-1或1,并且a
=a
t
(aa
t
)-1
。
[0081]
(2-7)根据(27)更新警戒者位置
[0082][0083]
其中,表示第k代中全局最优位置,β作为步长控制参数,是服从均值为0,方差为1的正态分布的随机数,λ表示麻雀移动的方向同时也是步长控制参数,并且λ∈[-1,1]。ε设置为常数,用以避免分母为0。fi表示当前个体的适应度值,fg和fw表示目前全局最优和最差个体的适应度值。
[0084]
(2-8)计算麻雀种群适应度并进行重新排序,并更新麻雀种群位置;
[0085]
(2-9)通过(28)将和从中分离出来。通过(29)计算信息向量然后由(30)形成信息矩阵
[0086][0087][0088][0089]
(2-10)通过(31)计算参数向量和通过(32)计算信息向量然后由(33)形成信息矩阵
[0090][0091][0092][0093]
(2-11)对于所有麻雀,根据(34)计算最佳麻雀位置
[0094][0095]
(2-12)通过(35)(36)(37)(38)从最优位置中提取和
[0096][0097][0098][0099][0100]
其中,g代表参数顺序,和分别为参数向量a,b和γ的估计值,为时间延迟τ的估计值。
[0101]
(2-13)将迭代变量k增加1并返回到步骤(2-5)。当k达到最大迭代次数t时,终止迭代并获得参数向量和时间延迟
[0102]
本发明辨识方法计算准确,辨识精度高,适用于液压位置伺服系统时滞反馈非线性模型的参数估计。
[0103]
与现有技术相比,本发明的有益效果为:
[0104]
(1)本发明建立了液压位置伺服系统时滞反馈非线性参数辨识的模型,将液压位置伺服系统的给定电压信号作为输入数据,液压位置伺服系统的负载位移数据作为输出数据;利用改进circle混沌线性变权麻雀搜索算法对该模型参数进行辨识。由图5可以看出该算法可以很好的辨识模型内部参数。
[0105]
(2)相比麻雀搜索算法和粒子群优化算法,改进circle混沌线性变权麻雀搜索算法采用改进的circle混沌图对种群进行初始化,增加种群多样性,提高算法的全局搜索能
力和收敛速度;在发现者麻雀的位置更新做了改进,使得降低了群体智能算法容易早熟的风险,避免算法后期容易在全局最优解附近发生振荡现象。改进后的麻雀搜索算法能够更好的辨识带未知时滞的反馈非线性系统,且辨识的精度也较高;同时,也说明本辨识方法对于液压伺服系统有较好的适用性。
附图说明
[0106]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
[0107]
图1为本发明中液压位置伺服系统的组成分布图;其中ui为输入电压信号,uf为反馈电压信号,δu为误差信号,x
p
为负载位移。
[0108]
图2为本发明中液压位置伺服系统组成原理图。
[0109]
图3为本发明中液压位置伺服系统时滞反馈非线性模型结构示意图。
[0110]
图4为本发明中基于液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法的整体流程图。
[0111]
图5为本发明实施例中参数估计误差δ随迭代次数k变化的示意图。
具体实施方式
[0112]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。当然,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0113]
实施例
[0114]
将所提出的液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法应用于某液压伺服系统,该系统的组成分布图参见图1。本发明实施例给出了给定电压信号输入和负载位移输出的关系,该液压伺服系统的非线性和线性环节由以下函数表示:
[0115][0116]
a(z)=1 a1z-1
a2z-2
=1 0.80z-1
0.34z-2
[0117]
b(z)=b1z-1
b2z-2
=0.44z-1
0.67z-2
[0118]
参数向量的真实值如下所示:
[0119]
θ=[a1,a2,b1,b2,γ1,γ2,τ]
τ
=[0.80,0.34,0.44,0.67,0.14,0.11,1.00]
τ
[0120]
定义为θ的估计,参数估计误差
[0121]
辨识过程中采用matlab软件,根据系统的输入输出数据,建立液压伺服系统的时滞反馈非线性模型。
[0122]
本实例的液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法,具体步骤如下:
[0123]
(1)构建液压位置伺服系统的时滞反馈非线性辨识模型,具体步骤如下:
[0124]
第一步:构建液压位置伺服系统的时滞反馈非线性模型的结构,参加图3。
[0125]
第二步:根据此模型,构建液压位置伺服系统的时滞反馈非线性模型表达式如下:
[0126][0127][0128][0129][0130]
其中,r(t)为输入量,y(t)为输出量,为反馈通道输出,v(t)是一个均值为零、方差为σ2满足高斯分布的白噪声;定义x(t),u(t)和w(t)为不可测的中间变量;τ是反馈非线性系统时滞,z为后移算子:z-1
y(t)=y(t-1),a(z),b(z)是关于z的多项式,描述为如下形式:
[0131][0132][0133]
其中,多项式因子ai和bj是待估计的参数,分母的阶数na和分子的阶数nb是已知的。将系统的非线性部分可以用传递函数表示为:
[0134][0135]
其中,γi(i=1,2,...,m)是需要辨识的非线性函数的系数,m是非线性块的参数个数。
[0136]
将公式两边同乘以a(z)得到:
[0137]
a(z)y(t)=q-τ
b(z)u(t) v(t)
ꢀꢀꢀꢀꢀ
(8)
[0138]
可表示为:
[0139][0140]
其中噪声模型输出w(t)和前馈通道输出x(t)为:
[0141][0142][0143]
反馈非线性系统模型可以表示为:
[0144][0145]
将线性子系统的参数向量a、b以及非线性部分的参数向量γ定义为:
[0146][0147]
那么整个模型的参数向量θ表示为:
[0148][0149]
对应的信息向量表示为:
[0150][0151][0152]
其中:
[0153][0154][0155][0156]
其中:
[0157]
f(y(t))=[f1(y(t)),f2(y(t)),...,fm(y(t))]∈r1×m[0158]
根据上述定义,系统的非线性部分表示为:
[0159][0160]
得到描述的液压位置伺服系统的时滞反馈非线性模型:
[0161][0162]
第三步:得到液压位置伺服系统的时滞反馈非线性模型为:
[0163][0164]
(2)构建液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法的辨识流程。
[0165]
第一步:初始化麻雀搜索算法,采用改进的circle混沌映射初始化麻雀种群;
[0166]
第二步:收集液压位置伺服系统的给定电压信号作为输入数据,液压位置伺服系统的负载位移数据作为输出数据;
[0167]
第三步:计算麻雀群体中个体适应度,对所有麻雀个体适应度进行排序,找出全局最优适应度值和全局最差适应度值,然后计算初始全局最优位置;
[0168]
第四步:令迭代变量k=1,计算麻雀的初始位置;
[0169]
第五步:基于线性递减权重法计算当前的惯性权重值,更新发现者位置;
[0170]
第六步:更新跟随者的位置;
[0171]
第七步:更新警戒者的位置;
[0172]
第八步:计算麻雀种群适应度并进行重新排序,更新麻雀种群位置;
[0173]
第九步:对于所有麻雀,计算群体最佳麻雀位置;
[0174]
第十步:从群体最佳位置中分离提取出参数向量和时延的估计值;
[0175]
第十一步:将迭代变量k值加1,重复上述过程。
[0176]
(3)参见图4,构建出液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法如下:
[0177][0178]
[0179][0180][0181][0182][0183][0184][0185][0186][0187][0188][0189][0190][0191]
y(l)=[y(l),y(l-1),...,y(1)]
t
ꢀꢀꢀꢀ
(31)
[0192][0193][0194][0195][0196]
参见图4,所述液压位置伺服系统改进混沌变权麻雀搜索参数辨识方法的辨识流程的具体步骤如下:
[0197]
(1)设置麻雀个数为n,每个麻雀包含na nb m个变量,通过(17)采用改进的circle混沌映射初始化麻雀种群,设置xn为当前麻雀的位置,x
n 1
为更新后的麻雀位置,最大迭代次数为t、预警值为st、发现者pd和警戒者sd比例及w
max
、w
min
。其中wk为惯性权重,w
max
和w
min
分别为线性权重的最大值和最小值;
[0198]
(2)设置数据长度l,收集液压位置伺服系统的给定电压信号输入数据和负载位移输出数据{r(t),y(t)}。通过(31)构造输出堆积向量形式y(l)和信息堆积向量ψ(l,τ);
[0199]
(3)通过(18)计算麻雀群体中个体适应度,对所有麻雀个体适应度进行排序,找出全局最优适应度值fg和全局最差适应度值fw,然后计算初始全局最优位置
[0200]
(4)设迭代变量k=1,开始迭代,个体的初始位置是
[0201]
(5)基于线性递减权重法通过式(19)计算wk,通过式(20)将发现者位置更新为
[0202]
(6)通过式(21)更新跟随者位置
[0203]
(7)通过式(22)更新警戒者位置
[0204]
(8)计算麻雀种群适应度并进行重新排序,并更新麻雀种群位置;
[0205]
(9)通过式(23)将和从中分离出来,通过(24)计算信息向量然后由(25)形成信息矩阵
[0206]
(10)通过式(26)计算参数向量和通过(27)计算信息向量然后由(28)形成信息矩阵
[0207]
(11)对于所有麻雀,根据(29)计算最佳麻雀位置通过式(30)将和从分离;
[0208]
(12)通过(32)(33)(34)(35)从最优位置中提取和
[0209]
(13)将迭代变量k增加1并返回到步骤(2-5),当k达到最大迭代次数t时,终止迭代并获得参数向量和
[0210]
其中各变量定义如下:
[0211]
定义输入量为r(t),输出量为y(t);定义v(t)是一个均值为零、方差为σ2满足高斯分布的白噪声;定义x(t)和w(t)为不可测的中间变量;定义θ作为参数向量;作为信息向量;l为数据长度,ψ(l)为信息堆积向量,y(l)为输出堆积向量;
[0212]
设置麻雀个数为n,每个麻雀包含na nb m个变量,最大迭代次数t,预警值st,发现者比例pd,警戒者比例sd,w为惯性权重,w
max
和w
min
分别为线性权重的最大值和最小值。
[0213]
k为迭代变量;表示在第k代中第i只麻雀在第j维的位置,随机数ξ∈[0,1],为第k代种群全局最优适应度,q是服从正态分布的随机数,l是一个每个元素均为1的1
×
d维的矩阵;r2表示报警值,st表示安全阈值。
[0214]
表示第k代适应度最差的个体位置,表示第k 1代中适应度最佳的个体位置。a表示1
×
d的矩阵,矩阵中每个元素预设为-1或1,并且a
=a
t
(aa
t
)-1
。
[0215]
表示第k代中全局最优位置,β作为步长控制参数,是服从均值为0,方差为1的正态分布的随机数,λ表示麻雀移动的方向同时也是步长控制参数,并且λ∈[-1,1]。ε设置为常数,用以避免分母为0。fi表示当前个体的适应度值,fg和fw表示目前全局最优和最差个
体的适应度值。
[0216]
定义为参数向量θ在第k次迭代的估计值,为时间延迟τ在第k次迭代的估计值,定义为信息向量在第k次迭代的估计值,定义为信息堆积向量ψ(l)在第k次迭代的估计值;
[0217]
定义为参数向量的个体最优解,为时间延迟的个体最优值;定义为信息向量的个体最优;定义为信息堆积向量的个体最优;g代表参数顺序,和分别为参数向量a、b和γ的估计值,为时间延迟τ的估计值;
[0218]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。