1.本发明涉及航空器飞行控制领域,具体涉及航天器编队飞行姿态跟踪控制问题。
背景技术:
2.近几十年来,航天器已成为许多研究人员的热门话题。在航天器领域中,编队飞行是航天器研究的技术难点和需要主攻的方向。航天器编队飞行指的就是多个航天器按照指令进行姿态一致的飞行,这有利于航天器组多任务的并行执行。因此,航天器编队飞行系统的姿态跟踪问题是关键和难点。目前,滑模控制方法因其独特的抗干扰能力强的优势,在航天器编队飞行姿态跟踪控制领域有着举足轻重的地位。专利cn201910988277.2提出了一种基于无向通信拓扑的航天器编队姿态协同控制方法,在假设航天器编队系统中同时存在外部干扰力矩和转动惯量不确定性的情况下,建立了积分终端滑模面,并基于此设计了分布式航天器编队有限时间协同控制方法。但该方法使用了无向的通信拓扑,而在实际的航天器编队通信中更常见的为有向通信拓扑,显然使用有向拓扑更符合实际。同时上述专利所采用的积分终端滑模方法,在收敛速度上还需要有明显的提高。在专利cn202110528568.0中,发明人提出了一种挠性航天器有限时间姿态协同控制方法,基于无向通信拓扑结构,建立了快速终端滑模面,同时考虑到未知的外界扰动、难以观测的挠性动态和时变的惯性参数,设计了设计自适应容错控制器。该方法中快速终端滑模能使得收敛速度有所提升,但忽略了终端滑模存在的奇异性,而且也同样使用了无向的通信拓扑。
3.由于航天器编队飞行过程中不可避免的会产生外界干扰,同时在刚性航天器的动力学模型中会有不确定性,因而这使得航天器编队的姿态跟踪控制变得具有难度和挑战性。近年来,国内外许多学者针对这一问题,分别都提出了自己的控制方案,但大多存在以下问题之一:
4.(1)设计多个分散式控制器,在实际系统设计中有较大难度,难以实现;
5.(2)没有能够同时考虑到系统中可能存在外部扰动和模型参数不确定;
6.(3)在子系统通信中大部分使用了无向拓扑结构而不是更普遍的有向拓扑结构;
7.(4)设计的滑模面具有奇异或是收敛较慢等问题。
技术实现要素:
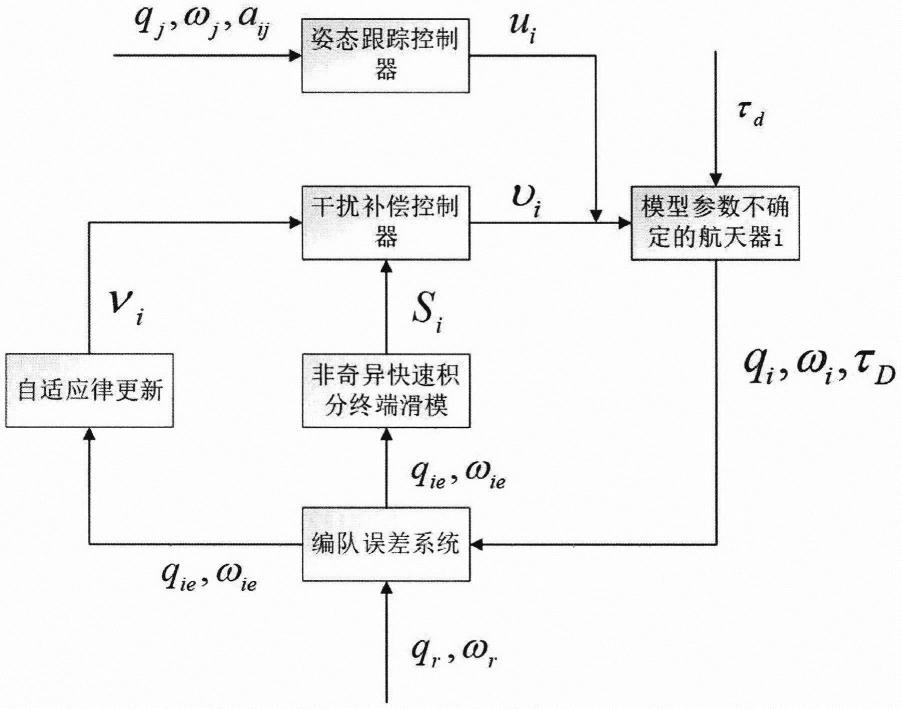
8.鉴于上述现有技术中的不足之处,本发明提出基于非奇异快速积分终端滑模方法,实现航天器编队飞行姿态跟踪控制,通过以下步骤实现:
9.步骤1、建立刚性航天器动力学模型:
[0010][0011][0012]
其中i=1,2,...,n,n是跟随航天器的数量,四元数用于描述航天器姿态,q
i0
和分别是姿态角四元数的标量部分和向量部分,且
其中i3为单位矩阵,表示q
iv
的斜对称矩阵,它们满足是对称正定惯性矩阵,为航天器角速度,是有界控制转矩,是外界扰动。表示ωi的斜对称矩阵,其形式与相同,具体如下:
[0013][0014]
步骤2、将领导者航天器的姿态角和角速度分别记为和那么领导者和跟随者的姿态跟踪误差方程可以表示为:
[0015][0016][0017]
其中和分别表示四元数角误差和角速度误差,包含了和角速度误差为ω
ie
=ω
i-ciωr,其中ci是坐标变换矩阵且满足
[0018]
步骤3、引入模型参数不确定,惯性矩阵ji分成已知的惯性矩阵和未知的惯性矩阵将步骤1中的模型改写为:
[0019][0020]
其中τi=υi ui将会被设计为两部分控制输入,υi用于补偿集总不确定,ui用于姿态跟踪控制。为集总不确定性,且满足上界未知。
[0021]
步骤4、建立非奇异快速积分终端滑模面以及设计自适应律,具体如下:
[0022][0023]
其中是需要设计的系数矩阵,p,q,m,n是正奇数且满足
[0024]
控制器写成两部分组成:
[0025][0026]
[0027]
其中辅助参数γ为:
[0028][0029]
自适应参数v的自适应律为:
[0030][0031]
其中为v的估计值,l
1,2,3
为较小的正常数。
[0032]
步骤5、验证步骤4所设计的非奇异快速积分终端滑模面和自适应参数的正确性,证明设计的滑模面可以有限时间收敛到零,系统稳定。
[0033]
步骤6、将处理集总不确定后的系统称为标称系统,同时利用有向拓扑图,设计姿态跟踪控制器,具体如下:
[0034]
标称系统:
[0035][0036]
有向拓扑图定义为g=(v,ε,a),其中v={1,2.....n}是节点集,是边集,a=[a
ij
]是g的加权邻接矩阵,且a
ij
被定义为:
[0037][0038]
l=[l
ij
]∈rn×n被定义为g的拉普拉斯矩阵,且l
ij
满足:
[0039][0040]
设计标称系统滑模面:
[0041][0042]
其中mi和λ都是较小的正常数,利用有向拓扑图可将滑模面写为:
[0043][0044]
其中m=diag{m1,m2,...,mn},j=diag{j1,j2,...,jn},},
[0045]
控制器ui设计为:
[0046]
[0047]
其中为正定常数矩阵,参数ri为:
[0048][0049]
步骤7、验证航天器编队飞行姿态跟踪系统的稳定性。
[0050]
本发明同时考虑了航天器编队飞行系统的外部扰动和模型参数不确定,将其处理为集总不确定性,通过自适应律估计上界。设计了一种新颖的非奇异快速积分终端滑模面,可以同时具有非奇异性和快速性的特点。它可以使系统的初始状态在滑模面上收敛,并在有限时间内收敛。标称系统是基于有向的通信拓扑设计的,比无向拓扑具有更高的难度。
附图说明
[0051]
图1为本发明的摘要附图;
[0052]
图2为本发明在航天器编队飞行控制中使用的有向拓扑结构;
[0053]
图3为跟随者航天器1的姿态角误差、角速度误差、控制输入;
[0054]
图4为跟随者航天器2的姿态角误差、角速度误差、控制输入;
[0055]
图5为跟随者航天器3的姿态角误差、角速度误差、控制输入;
具体实施方式
[0056]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0057]
为了本领域普通技术人员可以更好地理解本发明的实施,本实施例提供了利用matlab2020b软件进行非奇异快速积分终端滑模控制的仿真验证结果。
[0058]
航天器编队姿态跟踪控制方法,包括以下步骤:
[0059]
步骤1、建立刚性航天器动力学模型:
[0060][0061][0062]
其中i=1,2,...,n,n是跟随航天器的数量,四元数用于描述航天器姿态,q
i0
和分别是姿态角四元数的标量部分和向量部分,且其中i3为单位矩阵,表示q
iv
的斜对称矩阵,它们满足是对称正定惯性矩阵,为航天器角速度,是有界控制转矩,是外界扰动。表示ωi的斜对称矩阵,其形式与相同,具体如下:
[0063][0064]
步骤2、将领导者航天器的姿态角和角速度分别记为和那么领导者和跟随者的姿态跟踪误差方程可以表示为:
[0065][0066][0067]
其中和分别表示四元数角误差和角速度误差,包含了和角速度误差为ω
ie
=ω
i-ciωr,其中ci是坐标变换矩阵且满足和||ci||=1。
[0068]
步骤3、引入模型参数不确定,惯性矩阵ji分成已知的惯性矩阵和未知的惯性矩阵将步骤1中的模型改写为:
[0069][0070]
其中τi=υi ui将会被设计为两部分控制输入,υi用于补偿集总不确定,ui用于姿态跟踪控制。为集总不确定性,且满足上界||τd||≤v1 v2||ωi|| v3||ωi||2未知。
[0071]
步骤4、建立非奇异快速积分终端滑模面以及设计自适应律,具体如下:
[0072][0073]
其中是需要设计的系数矩阵,p,q,m,n是正奇数且满足
[0074]
控制器写成两部分组成:
[0075][0076][0077]
其中辅助参数γ为:
[0078][0079]
自适应参数v的自适应律为:
[0080][0081]
其中为v的估计值,l
1,2,3
为较小的正常数。
[0082]
步骤5、验证步骤4所设计的非奇异快速积分终端滑模面和自适应参数的正确性,证明设计的滑模面可以有限时间收敛到零,系统稳定,具体如下:
[0083]
选取李雅普诺夫函数为:
[0084][0085]
其中为v的估计值,为v的上界,∈i(i=1,2,3)是一个很小的常数,满足0≤∈i≤vi。
[0086]
那么对v求导可以得到:
[0087][0088]
接着将||τd||≤v1 v2||ωi|| v3||ωi||2代入推导过程,同时记四个辅助参数为:
[0089][0090][0091][0092][0093]
那么可以写为:
[0094][0095]
其中可证得滑模面可以有限时间收敛到零。
[0096]
步骤6、将处理集总不确定后的系统称为标称系统,同时利用有向拓扑图,设计姿态跟踪控制器,具体如下:
[0097]
标称系统:
[0098][0099]
有向拓扑图定义为g=(v,ε,a),其中v={1,2.....n}是节点集,是边集,a=[a
ij
]是g的加权邻接矩阵,且a
ij
被定义为:
[0100][0101]
l=[l
ij
]∈rn×n被定义为g的拉普拉斯矩阵,且l
ij
满足:
[0102][0103]
设计标称系统滑模面:
[0104][0105]
其中mi和λ都是较小的正常数,利用有向拓扑图可将滑模面写为:
[0106][0107]
其中m=diag{m1,m2,...,mn},j=diag{j1,j2,...,jn},},
[0108]
控制器ui设计为:
[0109][0110]
其中为正定常数矩阵,参数ri为:
[0111]
[0112]
步骤7、验证航天器编队飞行姿态跟踪系统的稳定性,具体如下:
[0113]
选取李雅普诺夫函数为:
[0114][0115]
那么对v求导可以得到:
[0116][0117]
而控制器u可以写为:
[0118][0119]
其中因而可以写为:
[0120][0121]
可证得当在t
→
∞时,qi→
qr且ωi→
ωr。
[0122]
本发明利用matlab2020b软件进行非奇异快速积分终端滑模控制的仿真验证:
[0123]
(1)刚性航天器惯性矩阵的选取:领导者航天器和跟随者航天器分别记为jr和ji(i=1,2,3)
[0124][0125]
(2)初始参数选取:参考的初始姿态角为参考的初始角速度为ωr(0)=[0,0,0]
t
。跟随者航天器的初始姿态角为qi(0)=[1,0,0,0]
t
,跟随者航天器的初始角速度为ωi(0)=[0.2,0.2,0.2]
t
。
[0126]
(3)外界扰动选取:
[0127]
τ
1d
(t)=τ
2d
(t)=[0.01sin(t),0.01sin(t),0.01sin(t)]
t
[0128]
τ
3d
(t)=[-0.05sin(t),-0.05sin(t),-0.05sin(t)]
t
[0129]
(4)设计的基本参数选取:p=3,q=5,m=3,n=13;ti=0.06,mi=1(i=1,2,3),λ=0.5;z1=i3,z2=diag(1.2,1.2,1,2)。
[0130]
结果说明:
[0131]
本发明提出的非奇异快速积分终端滑模下的航天器编队姿态角误差和角速度误差跟踪具有较快的收敛速度,所设计的控制输入也不含抖振问题。能证明本发明提出的非奇异快速积分终端滑模在航天器编队飞行姿态跟踪控制领域的优越性。
[0132]
本发明未详细说明部分都属于领域技术人员公知常识,以上所述仅为本发明的一个具体实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。