技术特征:
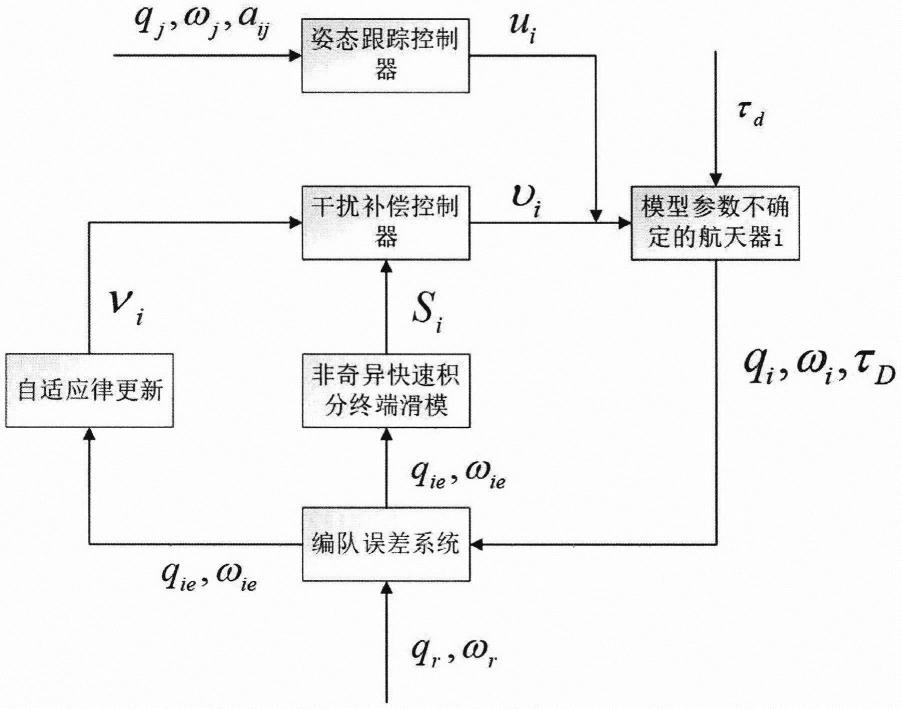
1.一种航天器编队飞行姿态跟踪控制方法,其特征在于,包括以下步骤:步骤1、建立刚性航天器动力学模型;步骤2、设定领导者航天器的姿态角和角速度,建立航天器编队姿态误差系统;步骤3、模型中加入外部扰动和模型参数不确定;步骤4、建立非奇异快速积分终端滑模面以及设计自适应律;步骤5、验证步骤4所设计的非奇异快速积分终端滑模面和自适应参数的正确性,证明设计的滑模面可以有限时间收敛到零,系统稳定;步骤6、将处理集总不确定后的系统称为标称系统,同时利用有向拓扑图,设计姿态跟踪控制器;步骤7、验证航天器编队飞行姿态跟踪系统的稳定性。2.根据权利要求1所述的方法,其特征在于,所属步骤1,模型为:2.根据权利要求1所述的方法,其特征在于,所属步骤1,模型为:其中i=1,2,...,n,n是跟随航天器的数量,四元数用于描述航天器姿态,q
i0
和分别是姿态角四元数的标量部分和向量部分,且其中i3为单位矩阵,表示q
iv
的斜对称矩阵,它们满足是对称正定惯性矩阵,为航天器角速度,是有界控制转矩,是外界扰动,表示ω
i
的斜对称矩阵,其形式与相同,具体如下:3.根据权利要求2所述的方法,其特征在于,假设将领导者航天器的姿态角和角速度分别记为和那么领导者和跟随者的姿态跟踪误差方程可以表示为:为:其中和分别表示四元数角误差和角速度误差,包含了和角速度误差为ω
ie
=ω
i-c
i
ω
r
,其中c
i
是坐标变换矩阵且满足4.根据权利要求2所述的方法,其特征在于,引入模型参数不确定,惯性矩阵j
i
分成已知的惯性矩阵和未知的惯性矩阵将航天器动力模型改写为:其中τ
i
=υ
i
u
i
将会被设计为两部分控制输入,υ
i
用于补偿集总不确定,u
i
用于姿态跟踪控制,为集总不确定性,且满足上界||τ
d
||≤ν1 ν2||ω
i
|| ν3||ω
i
|
|2。5.根据权利要求4所述的方法,其特征在于,建立非奇异快速积分终端滑模以及设计自适应律,具体如下:其中是需要设计的系数矩阵,p,q,m,n是正奇数且满足控制器写成两部分组成:写成两部分组成:其中辅助参数γ为:自适应参数ν的自适应律为:其中为ν的估计值,l
1,2,3
为较小的正常数。6.根据权利要求5所述的方法,其特征在于,验证步骤4所设计的非奇异快速积分终端滑模面和自适应参数的正确性,证明设计的滑模面可以有限时间收敛到零,系统稳定,选择李雅普诺夫函数为:其中为ν的估计值,为ν的上界,是一个很小的常数,满足可以通过引入四个参数k0,k1,k2,k3,可以推导得到所以误差系统可以
有限时间收敛。7.根据权利要求1所述的方法,其特征在于,步骤6包含:将处理集总不确定后的系统称为标称系统,同时利用有向拓扑图,设计姿态跟踪控制器具体如下:标称系统:有向拓扑图定义为g=(v,ε,a),其中v={1,2.....n}是节点集,是边集,a=[a
ij
]是g的加权邻接矩阵,且a
ij
被定义为:l=[l
ij
]∈r
n
×
n
被定义为g的拉普拉斯矩阵,且l
ij
满足:设计标称系统滑模面:其中m
i
和λ都是较小的正常数,利用有向拓扑图可将滑模面写为:其中m=diag{m1,m2,...,m
n
},j=diag{j1,j2,...,j
n
},},控制器u
i
设计为:其中为正定常数矩阵,参数r
i
为:8.根据权利要求7所述的方法,其特征在于,验证航天器编队飞行姿态跟踪系统的稳定性,取李雅普诺夫函数:利用等式推导出了即在t
→
∞时,q
i
→
q
r
且ω
i
→
ω
r
。
技术总结
本发明公开一种航天器编队飞行姿态跟踪控制方法,采用刚性航天器的动力学模型,并且考虑了系统必然存在未知的外界扰动和系统模型参数的不确定。将二者共同处理为集总不确定,建立非奇异快速积分终端滑模面,利用设计的自适应律估计集总不确定的上界。同时将不含集总不确定的飞行器编队系统作为标称系统,利用有向拓扑图,设计出编队系统姿态跟踪的控制器。本发明建立的非奇异快速积分终端滑模面可以同时具有非奇异性和快速性的特点,与现有的在飞行器编队系统中使用的滑模方法相比,具有新颖性;利用的有向拓扑图会比无向拓扑图更具有普遍性和挑战性。有普遍性和挑战性。有普遍性和挑战性。
技术研发人员:高志峰 陈宇杰 沙显青
受保护的技术使用者:南京邮电大学
技术研发日:2022.06.13
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。