1.本技术属于多级编队协同空战技术领域,特别涉及一种多机编队协同目标分配方法。
背景技术:
2.多级协同攻击决策是针对多目标,要求多架处在不同初始位置的战机按预定的态势对目标攻击占位,而后根据目标的实际情况伺机攻击目标。没架协同机攻击占位的时间和相互配合对协同攻击占位决策实现的速度和效果有着重要影响。
3.协同攻击决策关键要解决目标分配问题,目标分配的两个基本要素时分配不重复以及快速及时,常用的分配方法有:自主优先权的分配和协同优先权的分配,前者在不考虑与其他友机进行协同的情况下,根据态势数据和威胁判断独自确定的目标跟踪优先排序;后者考虑到了多机协同问题,避免了重复,考虑了分配的均衡。
4.因此,如何进行多机编队的协同目标分配是一个需要解决的问题。
技术实现要素:
5.本技术的目的是提供了一种多机编队协同目标分配方法,以解决现有技术中难以快速并且不重复地进行多机编队协同目标分配的问题。
6.本技术的技术方案是:一种多机编队协同目标分配方法,包括:获取目标位置信息,判断目标攻防意图;计算各个目标对编队内各个僚机的威胁系数,建立威胁系数矩阵模型;获取目标的主威胁系数和加权系数,计算一目标相对僚机的威胁系数,遍历剩余僚机与目标,建立威胁系数矩阵t,对每个目标设置目标索引;获取各目标的威胁系数将整个僚机编队、目标编队拆分成若干个作战分队;进行僚机与最易攻击目标的配对,判断僚机与该目标配对是否会对剩余飞机的配对造成潜在的航迹交叉碰撞,若产生航迹交叉碰撞,则寻找第二个最易攻击该目标的僚机,直至找到不产生航迹交叉碰撞的僚机与目标,该僚机与目标配对完成;删除配对完成的僚机与目标,对剩余的僚机与目标进行分别配对,直至全部配对完成。
7.优选地,所述作战分队的拆分方法为:获取僚机分队的最大外挂物数量、僚机分队的最小外挂物数量、目标分队的最大目标个数、目标分队的最小目标个数、僚机分队个数和目标分队个数;对目标编队进行二机分队形式的拆分,形成若干目标分队;对僚机编队进行二机分队形式的拆分,形成若干僚机分队;判断僚机分队最小外挂物数量是否大于2,若是,则进行目标分队的再组合;若否则不进行组合;判断僚机分队的最小外挂物数量是否大于等于目标分队的最大目标个数、僚机分队的个数是否大于等于目标分队的个数,若是,则进行僚机与目标的分组配对;若否,则进行僚机分队与目标分队的再拆分;判断再拆分后的僚机分队与目标分队的外挂物数量与分队个数,若僚机分队的最小外挂物数量大于等于目标分队的最大目标个数、僚机分队的个数大于等于目标分队的个数,则进行僚机与目标的分组配对;若否,则不进行僚机与目标的分组配对;若僚机分队的最大外挂物数量小于等于目
标分队的最小目标个数、僚机分队的个数小于等于目标分队的个数,则进行僚机与目标的分组配对;否则不进行僚机与目标的分组配对。
8.优选地,所述僚机与目标的配对方法为:在威胁系数矩阵中定位最大威胁目标索引号及其所在的目标分队;根据优势矩阵,获取当前剩余每架僚机最易攻击的目标索引号,统计优先攻击当前最大威胁目标的僚机个数;反复寻找剩余目标中最大威胁目标索引,直至目标个数为1,找到当前首要分配目标;针对当前首要分配目标,根据优势矩阵寻找当前最易攻击该目标的僚机,进行该目标与僚机的防撞规则判断,则不满足防撞规则,则继续寻找第二个最易攻击该目标的僚机,直至找到为止;若满足防撞规则,则该目标与僚机配对成功。
9.优选地,所述防撞规则的判断方法为:在当前配合的僚机与目标位置确定水平面内直线l,设定僚机所在分队为wg
p
,目标所在分队为tgq;获取僚机当前时刻的位置和速度方向,计算当前僚机相对于直线l的位置、僚机速度方向相对于直线l的角度,确定僚机相对直线的分布;遍历剩余僚机,计算剩余僚机相对于配对直线的分布,具体为:僚机i
max
所在分队剩余外挂物个数fn
wing
,左侧分布外挂物个数fn
left
、右侧分布外挂物个数fn
right
、中间分布外挂物个数fn
mid
;获取目标当前时刻的相对位置和相对态势变化趋势;遍历剩余目标,计算剩余目标相对于当前配对直线的分布,具体为:僚机i
max
多目标攻击范围内分布目标个数tn
inmulti
,左侧分布目标个数tn
left
、右侧分布目标个数tn
right
、中间分布目标个数tn
mid
;针对当前将要配对的僚机与目标,对剩余未配对的僚机与目标进行预配对;获取该僚机与目标所在分队的配对个数:
10.distn
wing
=min(fn
wing-1,tn
inmulti
)
11.获取左侧预配对个数为:
12.distn
left
=min(fn
left
fn
mid
,tn
left
tn
mid
)
13.获取fn
mid
>0时更新中间剩余僚机个数:
14.fn
′
mid
=min(fn
left
fn
mid-distn
left
,fn
mid
);
15.获取tn
mid
>0时更新中间剩余目标个数:
16.tn
′
mid
=min(tn
left
tn
mid-distn
left
,tn
mid
)
17.获取右侧预配对个数:distn
right
=min(fn
′
mid
fn
right
,tn
′
mid
tn
right
)
18.获取总的预配对个数:distn=distn
wing
distn
left
distn
right
;
19.获取剩余需要配对个数:needdistn=n
总-n
已配对-1;
20.当预配对个数满足剩余需要配对个数时,满足防碰撞规则;否则不满足。
21.优选地,所述威胁系数矩阵的建立方法为:获取当前态势下目标相对僚机的水平进入角进行目标进入角主威胁系数的归一化计算,为获取当前态势下目标相对僚机的距离和接近速度,当目标接近时,按照目标接近时间计算接近速度威胁系数;当目标远离时,按照目标远离速度计算接近速度威胁系数;评估当前态势下的目标外挂物攻击区域,设置威胁距离和告警距离并获取目标距离主威胁系数;计算目标进入角加权系数计算接近速度加权系数计算目标距离加权系数kd=(t(d)
i,j
0.2)/1.2;计算目标意向威胁系数threat(q)
i,j
=kd*t(q)
i,j
,计算态势变化威胁系数计算目标距离威胁系数threat(d)
i,j
=kq*t
(d)
i,j
,对三者进行加权求和,获取目标相对于僚机的威胁系数为:遍历剩余僚机和目标,计算形成威胁系数矩阵。
22.优选地,所述目标攻防意图的判断方法包括:判断目标相对于本机的位置,包括本机位置、本机速度矢量、目标方位角、目标进入角、目标机位置和目标速度矢量,获取目标相对位置与目标方位角的关系;获取目标攻击区负载的范围和变化趋势、目标进入角变化和双方距离变化,若本机已进入目标攻击区,则判断目标有攻击意图;若己方在目标攻击区之外,则计算目标的进入角,若目标的进入角逐渐增大,同时本机与目标的距离变小则判断目标有攻击意图;若目标的进入角逐渐减小,同时双方距离减小不明显或者增大,则判断目标无攻击意图。
23.本技术的一种多机编队协同目标分配方法,在进行多机编队协同目标的分配时,通过先判断目标的攻防意图,而后根据目标对各个僚机的威胁系数建立威胁系数矩阵模型,并根据主威胁系数和加权系数建立威胁系数矩阵,这样在进行目标的配对时,能够根据目标对僚机的不同威胁能力找到各个僚机最合适攻击的目标,同时考虑到防撞规则,在满足防撞规则的前提下对僚机与目标进行一一配对,从而保证在不产生航迹碰撞的前提下各个僚机能够快速地匹配最优的攻击目标,并且在进行配对时从最小威胁度所在位置进行配对,这样能够有更大的分配空间来应对威胁度更大的目标,将配对完成的僚机与目标删除,以加快后续的配对进度,配对高效、决策准确稳定。
附图说明
24.为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
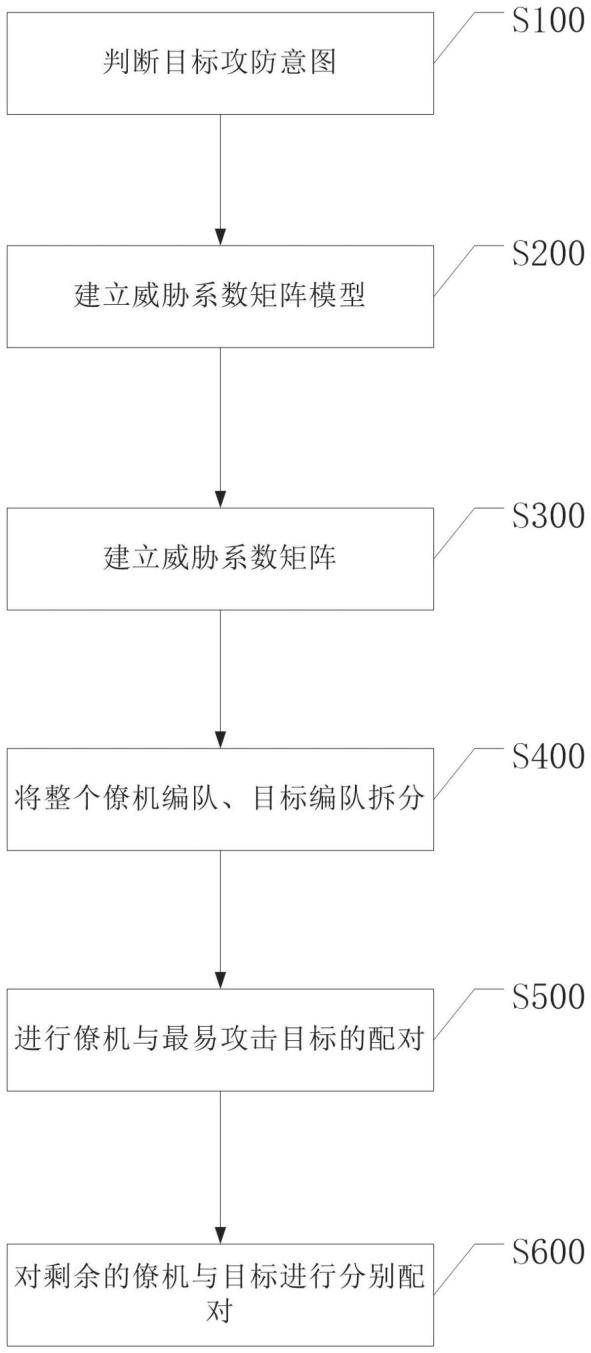
25.图1为本技术整体流程示意图;
26.图2为本技术本机与目标相对位置示意图;
27.图3为本技术目标相对本机产生攻击意图时的运动轨迹图;
28.图4为本技术目标相对本机产生防御意图时的运动轨迹图;
29.图5为本技术目标威胁系数组成示意图;
30.图6为本技术考虑分队形式分配的逻辑流程示意图;
31.图7为本技术飞机相对于配对直线l的分布示意图。
具体实施方式
32.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
33.一种多机编队协同目标分配方法,
34.如图1所示,包括以下步骤:
35.步骤s100,获取目标位置信息,判断目标攻防意图;
36.只有准确获知目标的位置和攻防意图,才能够对飞机编队后续的攻击态势做出准确的判断,因此需要先对目标相对本机的位置和攻防意图进行判断。
37.1)目标相对本体位置判断
38.双方态势图形如图2所示,其中,o为本机位置,本机速度矢量,υm目标方位角,q目
标进入角,m为目标机位置,目标速度矢量。
39.目标相对本机的位置由方位角和俯仰角决定,在此为简化起见不考虑目标俯仰角只考虑方位角,以目标与本机的水平相对位置代表双方的位置关系。随着目标方位角的变化将目标机的位置分为前方、侧向、尾向三种,在此以外挂物允许发射最大离轴角η
mmax
为前方和侧向的分界,目标相对位置与方位角υm的关系如下:
40.a)前方:-η
mmax
≤υm≤η
mmax
;
41.b)侧向:η
mmax-π≤υm<-η
mmax
∩η
mmax
<υm≤π-η
mmax
;
42.c)尾后:-π≤υm<η
mmax-π∩π-η
mmax
<υm≤π。
43.2)目标攻防意图判断
44.推断目标的攻防意图的重要依据有目标攻击区覆盖的范围和变化趋势、目标进入角变化和双方距离变化等。
45.先按照距离对目标的攻防意图进行判断:
46.在己方进入目标攻击区范围内,敌方显然可以对己方发起攻击,此时认为目标有攻击意图;
47.如图3、图4所示,在未进入目标攻击区时依据目标进入角和距离的变化来判断,具体为:当己方在目标攻击区之外时,以一定的周期计算目标进入角,由于外挂物离轴角的限制,外挂物攻击目标时一般都尽可能将机头对准和接近目标,若目标机的进入角逐渐增大,同时双机距离变化,此趋势经过一定时间则判断目标有攻击意图;若目标的进入角逐渐减小,同时双方距离减小不明显或者增大,则判断目标无攻击意图。
48.步骤s200,计算各个目标对编队内各个僚机的威胁系数,建立威胁系数矩阵模型;
49.多机协同多目标攻击依赖全方位的信息共享,虽然作战每架飞机监视的空域有限,智能探测部分空域或跟踪部分目标,但是通过各传感器系统之间信息共享和交换,使得每架作战飞机都可以了解整个空域的态势,在一个整体空域里对目标进行跟踪、攻击或者规避。建立威胁矩阵的目的也在于此,通过将多架飞机的信息进行共享,能够对后续的攻击决策进行准确的判断。
50.在多机编队协同目标分配过程中,主要考虑如下规则:
51.1、考虑作战分队形式分配;
52.2、优先分配威胁度较大的目标;
53.3、考虑单机多目标攻击能力;
54.4、考虑编队航迹防撞规则。
55.威胁系数矩阵能够客观反映出在整个空战态势中,目标编队对僚机编队的具体威胁情况,威胁系数矩阵模型在建立时首先计算各个目标对编队内各个僚机的威胁系数t
i,j
,其中i=1,2
…
m,j=1,2
…
n,m为我方参与协同分配的僚机个数,n为长机获取的目标个数。
56.如图5所示,威胁系数t
i,j
的计算主要依据目标tj相对僚机fi的当前态势及态势发展情况,包括三部分:目标意向威胁系数、态势变化威胁系数和目标距离威胁系数,三个系数通过目标进入角、接近速度和目标距离来计算获得。
57.威胁系数矩阵的具体计算方法为:
58.1)进行主威胁系数计算
59.1、目标进入角主威胁系数
60.目标进入角主威胁系数由当前态势下目标相对僚机的水平进入角体现,水平进入角q
ij
范围为[-π,π],当时,目标速度指向僚机。目标进入角主威胁系数归一化计算如下:
[0061][0062]
2、接近速度主威胁系数
[0063]
接近速度主威胁系数由当前态势下目标相对僚机的距离和接近速度确定,其计算按目标接近速度正负分为接近和远离两种情况。当敌机接近时时,接近速度威胁系数由目标接近时间衡量;当敌机远离时,接近速度威胁系数由目标远离速度衡量。
[0064]
3、目标距离主威胁系数
[0065]
在当前态势下,通过评估和参考敌空外挂物攻击区,设置两个距离常值:威胁距离dd和告警距离de并获取目标距离主威胁系数。
[0066]
2)加权系数计算
[0067]
1、目标进入角加权系数
[0068]
由于空战飞机机动性能强度,目标速度方向变化较快,因此目标进入角对其他威胁因素的加权影响有限,目标速度方向变化较快,因此目标进入角对其他威胁因素的加权影响有限,进入角加权系数计算如下:
[0069][0070]
2、接近速度加权系数
[0071]
由于空战过程中相对态势变化剧烈,接近速度相对其他威胁因素的加权同样有限,因此接近速度加权系数计算方法如下:
[0072][0073]
3、目标距离加权系数
[0074]
由于目标距离变化相对惰性,因此目标距离对其他威胁因素的加权影响较大,计算方法如下:
[0075]
kd=(t(d)
i,j
0.2)/1.2。
[0076]
3)目标威胁系数计算
[0077]
在上述计算的主威胁系数和加权系数的基础上,
[0078]
步骤s300,获取目标的主威胁系数和加权系数,计算一目标相对僚机的威胁系数,遍历剩余僚机与目标,建立威胁系数矩阵t,对每个目标设置目标索引;
[0079]
计算目标意向威胁系数:
[0080]
threat(q)
i,j
=kd*t(q)
i,j
[0081]
态势变化威胁系数:
[0082][0083]
目标距离威胁系数:
[0084]
threat(d)
i,j
=kq*t(d)
i,j
[0085]
综合以上三者加权求和,目标tj相对僚机fi的威胁系数为:
[0086]
[0087]
4)遍历剩余僚机和目标,计算形成威胁系数矩阵t,并对每个目标设置目标索引,以便于后续的引用。
[0088]
步骤s400,获取各目标的威胁系数将整个僚机编队、目标编队拆分成若干个作战分队;该步骤主要根据不同的情况形成一套明确的协同目标分配规则,从而能够根据不同的情况快速地形成有效的编队。
[0089]
相对与单机作战而言,多机协同作战,不仅可以扩大编队的态势感知能力,提高作战效能,还可以大大提高战机的生存能力。因而,在我方火力充足、条件允许的情况下,长机在进行目标分配过程中,应尽量将整个僚机编队、目标编队拆分成若干个作战分队,以分队的形式进行火力分配。
[0090]
对僚机进行拆分时主要采用二机分队,当前根据实际情况的不同也可以采取其它的分队。首先根据目标相互之间的占位和态势关系、我方分队火力情况等对目标编队进行拆分,僚机编队分队拆分成功后,形式如下:
[0091]
wg
p
(i1,i2|msl
p
),p≤m
[0092]
其中,i1和i2为僚机分队wg
p
的成员索引号,msl
p
为分队的外挂物总个数。当不满足考虑分队分配时,僚机分队简化成每个分队仅一架僚机。
[0093]
目标编队拆分成功后,形式如下:
[0094]
tgq(j1,j2,j3,j4),q≤n
[0095]
其中,j1,j2,j3,j4为敌机分队tgq的成员索引号,无效索引设置为-1。当不满足考虑分队分配时,目标分队简化成每个分队仅一架僚机。
[0096]
如图6所示,图中,n
misl_max
为僚机分队最大外挂物数量;n
misl_min
为僚机分队最小外挂物数量;n
tgt_max
为目标分队最大目标个数;n
tgt_min
为目标分队最小目标个数;g
ming
为僚机分队个数;g
tgt
为目标分队个数。作战分队的具体拆分方法为:
[0097]
获取僚机分队的最大外挂物数量、僚机分队的最小外挂物数量、目标分队的最大目标个数、目标分队的最小目标个数、僚机分队个数和目标分队个数;
[0098]
对目标编队进行二机分队形式的拆分,形成若干目标分队;
[0099]
对僚机编队进行二机分队形式的拆分,形成若干僚机分队;
[0100]
判断僚机分队最小外挂物数量是否大于2,若是,则进行目标分队的再组合;若否则不进行组合;
[0101]
判断僚机分队的最小外挂物数量是否大于等于目标分队的最大目标个数、僚机分队的个数是否大于等于目标分队的个数,若是,则进行僚机与目标的分组配对;若否,则进行僚机分队与目标分队的再拆分;
[0102]
判断再拆分后的僚机分队与目标分队的外挂物数量与分队个数,若僚机分队的最小外挂物数量大于等于目标分队的最大目标个数、僚机分队的个数大于等于目标分队的个数,则进行僚机与目标的分组配对;若否,则不进行僚机与目标的分组配对;若僚机分队的最大外挂物数量小于等于目标分队的最小目标个数、僚机分队的个数小于等于目标分队的个数,则进行僚机与目标的分组配对;否则不进行僚机与目标的分组配对。
[0103]
步骤s500,进行僚机与最易攻击目标的配对,判断僚机与该目标配对是否会对剩余飞机的配对造成潜在的航迹交叉碰撞,若产生航迹交叉碰撞,则寻找第二个最易攻击该目标的僚机,直至找到不产生航迹交叉碰撞的僚机与目标,该僚机与目标配对完成;
[0104]
进行僚机与目标配对的一个关键点是防止剩余飞机的配对造成潜在的航迹交叉碰撞,产生碰撞时会对其他僚机的探测、攻击造成负面影响。
[0105]
如图7所示,防撞规则的判断方法为:
[0106]
(1)建立对应位置关系,由当前配对僚机i
max
和目标j
max
位置确定水平面内直线l,假设僚机i
max
所在分队为wg
p
,目标j
max
所在分队为tgq。
[0107]
(2)确定当前的僚机分布,获取僚机当前时刻下的位置和速度方向,计算当前僚机fi相对于直线l的位置僚机fi速度方向相对于直线l的角度综合两者确定僚机相对直线的分布。遍历剩余僚机,计算剩余僚机火力相对于配对直线的分布:僚机i
max
所在分队剩余外挂物个数fn
wing
,左侧分布外挂物个数fn
left
、右侧分布外挂物个数fn
right
、中间分布外挂物个数fn
mid
。两侧外挂物只能参与两侧的预配对,中间火力可以参与两侧预配对。
[0108]
(3)获取目标的当前位置分布,目标分布的判定主要依据当前时刻目标相对位置和相对态势变化趋势。遍历剩余目标,计算剩余目标相对于当前配对直线的分布:僚机i
max
多目标攻击范围内分布目标个数tn
inmulti
,左侧分布目标个数tn
left
、右侧分布目标个数tn
right
、中间分布目标个数tn
mid
。多目标攻击范围内的目标优先分配给当前僚机分队wg
p
,两侧目标只能参与两侧的预配对,中间目标可以参与两侧预配对。
[0109]
(4)进行碰撞的判断,针对当前将要配对的僚机i
max
和目标j
max
,对剩余未配对的僚机和目标进行预配对。僚机i
max
和目标j
max
所在分队配对个数:
[0110]
distn
wing
=min(fn
wing-1,tn
inmulti
)
[0111]
左侧预配对个数为:
[0112]
distn
left
=min(fn
left
fn
mid
,tn
left
tn
mid
)
[0113]
fn
mid
>0时更新中间剩余僚机个数:
[0114]
fn
′
mid
=min(fn
left
fn
mid-distn
left
,fn
mid
)
[0115]
tn
mid
>0时更新中间剩余目标个数:
[0116]
tn
′
mid
=min(tn
left
tn
mid-distn
left
,tn
mid
)
[0117]
右侧预配对个数为distn
right
=min(fn
′
mid
fn
right,
tn
′
mid
tn
right
)
[0118]
总的预配对个数为distn=distn
wing
distn
left
distn
right
;
[0119]
剩余需要配对个数为needdistn=n
总-n
已配对-1;当火力充足时,n
总
取目标个数,否则根据编队外挂物数目确定。
[0120]
当预配对个数能够满足剩余需要配对个数时,满足防碰撞规则;否则不满足,会造成剩余飞机配对时航迹交叉碰撞。
[0121]
在确定碰撞规则后,即可进行僚机与目标的配对,每进行一次配对,即进行依次碰撞规则判断,在满足碰撞碰撞规则,即剩余僚机不会发生碰撞后,完成配对;多机编队协同目标分配的结果最终以多对多的形式结束,配对个数为僚机编队飞机个数和目标飞机个数中的较小者:
[0122]n总
=min(m,n)
[0123]
僚机与目标的具体配对方法为:
[0124]
1)在威胁系数矩阵中查找当前最大威胁度目标所在位置,也即是定位最大威胁目标索引号j
max
及其所在的目标分队tgq;
[0125]
2)根据优势矩阵a
i,j
,获取当前剩余每架僚机最易攻击的目标索引号,统计优先攻击当前最大威胁目标j
max
的僚机个数;
[0126]
3)当满足如下条件时,本轮分配暂时不考虑目标j
max
,从步骤1)执行,寻找剩余目标里最大威胁目标索引j
′
max
,直到不能同时满足如下条件时,即找到当前首要分配的目标;
[0127]
4)针对当前首要分配的目标,根据优势矩阵寻找当前最易攻击该目标的僚机i
max
,若当前配对i
max
和j
′
max
不满足防撞规则,则继续寻找第二个最易攻击该目标的僚机i
′
max
,直到找到为止;若当前配对满足防撞规则时,则僚机i
′
max
和目标j
′
max
配对成功;
[0128]
步骤s600,删除配对完成的僚机与目标,对剩余的僚机与目标进行分别配对,直至全部配对完成。
[0129]
在进行多机编队协同目标的分配时,通过先判断目标的攻防意图,而后根据目标对各个僚机的威胁系数建立威胁系数矩阵模型,并根据主威胁系数和加权系数建立威胁系数矩阵,这样在进行目标的配对时,能够根据目标对僚机的不同威胁能力找到各个僚机最合适攻击的目标,同时考虑到防撞规则,在满足防撞规则的前提下对僚机与目标进行一一配对,从而保证在不产生航迹碰撞的前提下各个僚机能够快速地匹配最优的攻击目标,并且在进行配对时从最小威胁度所在位置进行配对,这样能够有更大的分配空间来应对威胁度更大的目标,将配对完成的僚机与目标删除,以加快后续的配对进度,配对高效、决策准确稳定。
[0130]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。