技术特征:
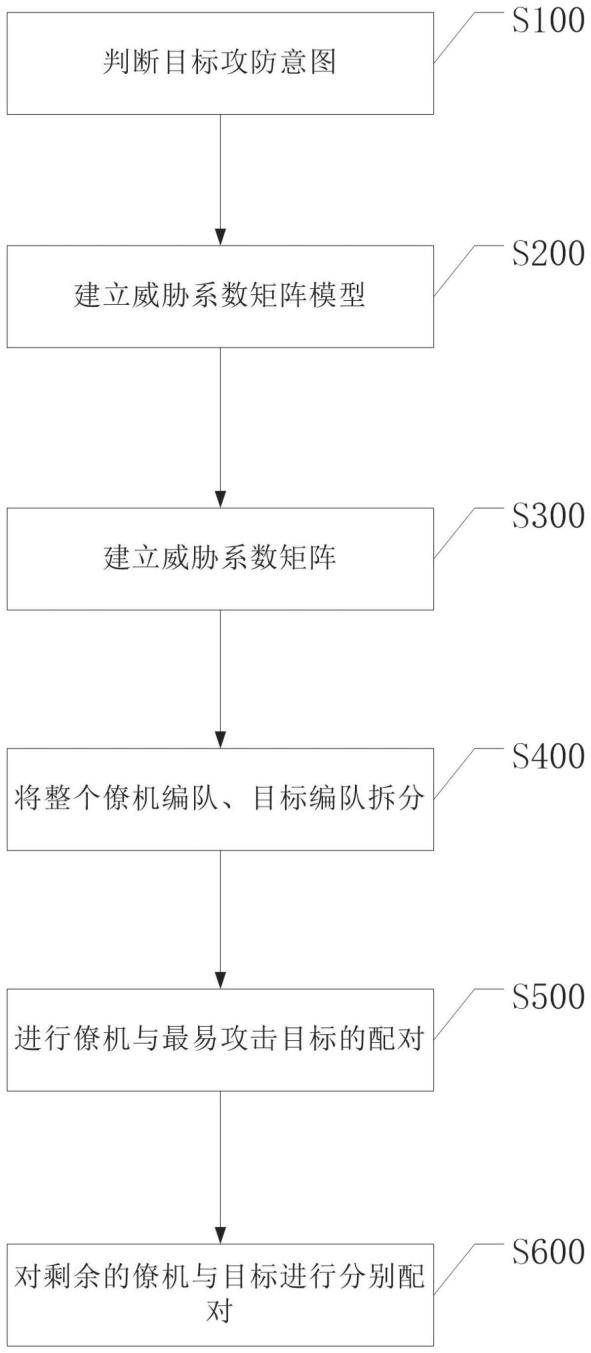
1.一种多机编队协同目标分配方法,其特征在于,包括:获取目标位置信息,判断目标攻防意图;计算各个目标对编队内各个僚机的威胁系数,建立威胁系数矩阵模型;获取目标的主威胁系数和加权系数,计算一目标相对僚机的威胁系数,遍历剩余僚机与目标,建立威胁系数矩阵t,对每个目标设置目标索引;获取各目标的威胁系数将整个僚机编队、目标编队拆分成若干个作战分队;进行僚机与最易攻击目标的配对,判断僚机与该目标配对是否会对剩余飞机的配对造成潜在的航迹交叉碰撞,若产生航迹交叉碰撞,则寻找第二个最易攻击该目标的僚机,直至找到不产生航迹交叉碰撞的僚机与目标,该僚机与目标配对完成;删除配对完成的僚机与目标,对剩余的僚机与目标进行分别配对,直至全部配对完成。2.如权利要求1所述的多机编队协同目标分配方法,其特征在于,所述作战分队的拆分方法为:获取僚机分队的最大外挂物数量、僚机分队的最小外挂物数量、目标分队的最大目标个数、目标分队的最小目标个数、僚机分队个数和目标分队个数;对目标编队进行二机分队形式的拆分,形成若干目标分队;对僚机编队进行二机分队形式的拆分,形成若干僚机分队;判断僚机分队最小外挂物数量是否大于2,若是,则进行目标分队的再组合;若否则不进行组合;判断僚机分队的最小外挂物数量是否大于等于目标分队的最大目标个数、僚机分队的个数是否大于等于目标分队的个数,若是,则进行僚机与目标的分组配对;若否,则进行僚机分队与目标分队的再拆分;判断再拆分后的僚机分队与目标分队的外挂物数量与分队个数,若僚机分队的最小外挂物数量大于等于目标分队的最大目标个数、僚机分队的个数大于等于目标分队的个数,则进行僚机与目标的分组配对;若否,则不进行僚机与目标的分组配对;若僚机分队的最大外挂物数量小于等于目标分队的最小目标个数、僚机分队的个数小于等于目标分队的个数,则进行僚机与目标的分组配对;否则不进行僚机与目标的分组配对。3.如权利要求1所述的多机编队协同目标分配方法,其特征在于,所述僚机与目标的配对方法为:在威胁系数矩阵中定位最大威胁目标索引号及其所在的目标分队;根据优势矩阵,获取当前剩余每架僚机最易攻击的目标索引号,统计优先攻击当前最大威胁目标的僚机个数;反复寻找剩余目标中最大威胁目标索引,直至目标个数为1,找到当前首要分配目标;针对当前首要分配目标,根据优势矩阵寻找当前最易攻击该目标的僚机,进行该目标与僚机的防撞规则判断,则不满足防撞规则,则继续寻找第二个最易攻击该目标的僚机,直至找到为止;若满足防撞规则,则该目标与僚机配对成功。4.如权利要求3所述的多机编队协同目标分配方法,其特征在于,所述防撞规则的判断方法为:在当前配合的僚机与目标位置确定水平面内直线l,设定僚机所在分队为wg
p
,目标所在分队为tg
q
;
获取僚机当前时刻的位置和速度方向,计算当前僚机相对于直线l的位置、僚机速度方向相对于直线l的角度,确定僚机相对直线的分布;遍历剩余僚机,计算剩余僚机相对于配对直线的分布,具体为:僚机i
max
所在分队剩余外挂物个数fn
wing
,左侧分布外挂物个数fn
left
、右侧分布外挂物个数fn
right
、中间分布外挂物个数fn
mid
;获取目标当前时刻的相对位置和相对态势变化趋势;遍历剩余目标,计算剩余目标相对于当前配对直线的分布,具体为:僚机i
max
多目标攻击范围内分布目标个数tn
inmulti
,左侧分布目标个数tn
left
、右侧分布目标个数tn
right
、中间分布目标个数tn
mid
;针对当前将要配对的僚机与目标,对剩余未配对的僚机与目标进行预配对;获取该僚机与目标所在分队的配对个数:distn
wing
=min(fn
wing-1,tn
inmulti
)获取左侧预配对个数为:distn
left
=min(fn
left
fn
mid
,tn
left
tn
mid
)获取fn
mid
>0时更新中间剩余僚机个数:fn
′
mid
=min(fn
left
fn
mid-distn
left
,fn
mid
);获取tn
mid
>0时更新中间剩余目标个数:tn
′
mid
=min(tn
left
tn
mid-distn
left
,tn
mid
)获取右侧预配对个数:distn
right
=min(fn
′
mid
fn
right
,tn
′
mid
tn
right
)获取总的预配对个数:distn=distn
wing
distn
left
distn
right
;获取剩余需要配对个数:needdistn=n
总-n
已配对-1;当预配对个数满足剩余需要配对个数时,满足防碰撞规则;否则不满足。5.如权利要求1所述的多机编队协同目标分配方法,其特征在于,所述威胁系数矩阵的建立方法为:获取当前态势下目标相对僚机的水平进入角进行目标进入角主威胁系数的归一化计算,为获取当前态势下目标相对僚机的距离和接近速度,当目标接近时,按照目标接近时间计算接近速度威胁系数;当目标远离时,按照目标远离速度计算接近速度威胁系数;评估当前态势下的目标外挂物攻击区域,设置威胁距离和告警距离并获取目标距离主威胁系数;计算目标进入角加权系数计算接近速度加权系数计算目标距离加权系数k
d
=(t(d)
i,j
0.2)/1.2;计算目标意向威胁系数threat(q)
i,j
=k
d
*t(q)
i,j
,计算态势变化威胁系数计算目标距离威胁系数threat(d)
i,j
=k
q
*t(d)
i,j
,对三者进行加权求和,获取目标相对于僚机的威胁系数为:遍历剩余僚机和目标,计算形成威胁系数矩阵。6.如权利要求1所述的多机编队协同目标分配方法,其特征在于,所述目标攻防意图的判断方法包括:判断目标相对于本机的位置,包括本机位置、本机速度矢量、目标方位角、目标进入角、
目标机位置和目标速度矢量,获取目标相对位置与目标方位角的关系;获取目标攻击区负载的范围和变化趋势、目标进入角变化和双方距离变化,若本机已进入目标攻击区,则判断目标有攻击意图;若己方在目标攻击区之外,则计算目标的进入角,若目标的进入角逐渐增大,同时本机与目标的距离变小则判断目标有攻击意图;若目标的进入角逐渐减小,同时双方距离减小不明显或者增大,则判断目标无攻击意图。
技术总结
本申请属于多级编队协同空战技术领域,为一种多机编队协同目标分配方法,在进行多机编队协同目标的分配时,通过先判断目标的攻防意图,而后根据目标对各个僚机的威胁系数建立威胁系数矩阵模型,并根据主威胁系数和加权系数建立威胁系数矩阵,这样在进行目标的配对时,能够根据目标对僚机的不同威胁能力找到各个僚机最合适攻击的目标,同时考虑到防撞规则,在满足防撞规则的前提下对僚机与目标进行一一配对,并且在进行配对时从最小威胁度所在位置进行配对,这样能够有更大的分配空间来应对威胁度更大的目标,将配对完成的僚机与目标删除,以加快后续的配对进度,配对高效、决策准确稳定。稳定。稳定。
技术研发人员:郎魁军 张少卿 孙智孝 耿文学 刘一楠 赵爽宇
受保护的技术使用者:中国航空工业集团公司沈阳飞机设计研究所
技术研发日:2022.06.10
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。