技术特征:
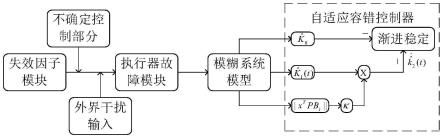
1.一种叉车执行器故障的自适应容错控制方法,其特征在于,包括以下步骤,设置失效因子υ
ij
用于配合叉车防侧翻系统执行器引起的不确定控制部分来判断系统执行器故障类型;设置执行器故障模型u
f
(t)针对所有的
m
个叉车执行器故障模型,描述了唯一的叉车防侧翻系统执行器故障模型,为带有执行器故障的叉车模型提供了实际的控制输入;设置模糊系统模型考虑了车身侧偏角速度、横摆角速度、车架侧倾角,执行器故障控制输入,干扰输入和控制输出;设置自适应容错控制器通过更新自适应定律控制器参数,应用lyaounov稳定性理论,给出叉车防侧翻系统存在执行器故障以及外界干扰时系统稳定的充分条件。2.根据权利要求1所述的叉车执行器故障的自适应容错控制方法,其特征在于:通过式(1-1)失效因子υ
ij
的范围结合执行器故障引起的不确定控制部分e(t)区分执行器故障的类型:3.根据权利要求1所述的叉车执行器故障的自适应容错控制方法,其特征在于:通过式(1-2)针对所有的m个叉车执行器故障模型,表示为如下唯一的故障模型:u
f
(t)=(1-υ
i
)u(t) ζ
i
u
s
(t) e(t)(1-2)式(1-2)中1-υ
i
(t)=diag[υ
i1
(t),
…
,υ
im
(t)]∈{υ
i1
,
…
,υ
iφ
};e(t)为叉车防侧翻系统执行器引起的不确定控制部分;其中u
s
(t)表示平衡重式叉车侧翻模糊系统中不可分解的执行器故障模型。4.根据权利要求1所述的叉车执行器故障的自适应容错控制方法,其特征在于:利用式(1-3)构建所述的叉车防侧翻模糊系统模型:式(1-3)中,x
c
(t)表示叉车的车身侧偏角速度、横摆角速度、车架侧倾角的车身状态;u(t)为平衡重式叉车侧翻模糊系统实际的控制输入;w(t)为系统的外界扰动。5.根据权利要求1所述的叉车执行器故障的自适应容错控制方法,其特征在于:自适应控制器(1-4)通过更新自适应定律控制器参数(1-5)进而保证策略的更新:5)进而保证策略的更新:式(1-4)中,其中φ
k
是任意正常数,是有限的,b
k
(k=1,2,
…
,n)是矩阵b
i
的第k列;6.一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如权利要求1至5中任一项所述方法的步骤。
技术总结
本发明的一种叉车执行器故障的自适应容错控制方法及存储介质,包括设置失效因子模块、执行器故障模块、模糊系统模型、自适应容错控制器模块;液压支撑油缸在叉车防侧翻系统作为执行器为叉车车身提供支撑力;失效因子即不健康因子,通过判断失效因子的大小范围去区分平衡重式叉车防侧翻系统执行器不同的故障类型;执行器的故障类型较多,组合各种故障进行唯一的故障模型表示;基于叉车车身状态参数及故障控制输入建立了叉车防侧翻系统模糊模型;自适应容错控制器通过使用自适应定律去更新控制器参数,保证闭环叉车防侧翻系统的稳定性。性。性。
技术研发人员:张冬林 王平 毕胜 郑小东 王月娥 夏光
受保护的技术使用者:安徽合力股份有限公司
技术研发日:2022.06.09
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。