1.本发明属于无人机控制技术领域,涉及一种无人机撞绳回收纵向轨迹控制方法及控制系统,更具体地说,是针对天钩回收型无人机在回收阶段通过全新的高度与速度解耦控制实现高精度撞绳回收的方法。
背景技术:
2.天钩回收型无人机无需使用机场跑道,也无需装载用于伞降回收的降落伞,因此在中小型无人机起降方面受到了极大关注。然而相比滑跑型与伞降型无人机来说,其在撞绳回收过程对高度与速度的要求要严苛的多,高度控制精度一般要求至少在1米以内,同时速度也要控制在安全速度以上的较小范围内。目前天钩回收无人机在撞绳回收时纵向主要采用高度比例控制,而速度一般使用固定油门或单纯的比例控制。对于无人机来说,高度与速度的变化是相互耦合影响的,这种高度通道与速度通道分开控制的方式很难达到期望的精度,造成一次撞绳成功率较低,且回收损伤风险较大。因此迫切需要发明一种高度与速度解耦控制的纵向轨迹控制方法,以在速度强约束情况下实现高精度的高度控制,提高撞绳成功率,降低回收风险。
技术实现要素:
3.要解决的技术问题
4.为了避免现有技术的不足之处,本发明提出一种无人机撞绳回收纵向轨迹控制方法及控制系统,解决天钩回收无人机一次撞绳成功率低、回收风险大的问题。
5.技术方案
6.一种无人机撞绳回收纵向轨迹控制方法,其特征在于步骤如下:
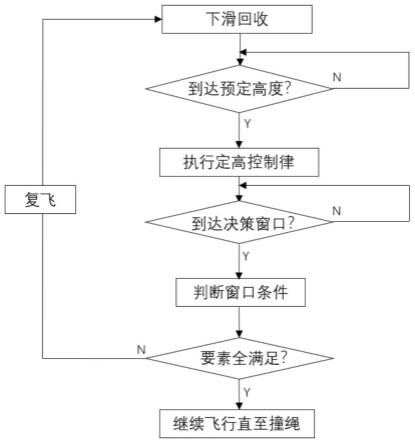
7.步骤1:当天钩回收无人机进入回收模态后,无人机从当前高度下滑到撞绳高度,并在此高度上对准预期撞绳点保持定高飞行,即纵向控制律为俯仰角限制条件下的高度与速度解耦控制;
8.当无人机飞行至距捕获绳一定距离的决策窗口时,自动判断高度偏差、速度偏差以及航迹偏差是否满足窗口要求,任意一个要素不满足要求则退出回收模态,转向、爬升远离天钩,复飞后再次进入回收;
9.步骤2:如果无人机到达决策窗口时所有要素均满足窗口要求,则无人机继续保持速度约束下的定高飞行,直到机翼撞到绳索,在此期间,无人机纵向控制律为俯仰角限制条件下的高度与速度解耦控制;
10.无人机撞上绳索后,绳索沿机翼前缘滑至翼尖,并由翼尖处的金属钩锁住绳索,此时,发动机停止工作,无人机在绳索的作用下减速、回摆,直到最后停止,从而实现无人机的天钩回收;
11.所述高度与速度解耦控制律:
[0012][0013][0014]
其中δe为升降舵控制量;δθ为无人机俯仰角偏差量;q为俯仰角速率;δh为高度偏差量;δv为速度偏差量。k
θ
为俯仰角放大系数;kq为俯仰角速率放大系数;k
he
为升降舵对高度控制的放大系数;k
ve
为升降舵对速度控制的放大系数;k
hi
为高度积分控制系数;
[0015]
δ
t
为发动机油门控制量;m为无人机质量;g为重力加速度;为高度变化率;v为速度;为速度变化率。k
tp
与k
ti
分别为相应的高度与速度解耦控制系数。
[0016]
一种实现所述无人机撞绳回收纵向轨迹控制方法的控制系统,其特征在于包括飞控计算机、角速度陀螺、航姿系统和卫星信号接收机;飞控计算机的输入端分别连接速度偏差量δv和高度偏差量δh的信号,输出端分别连接无人机的升降舵机和油门舵机;无人机上设有角速度陀螺、航姿系统和卫星信号接收机,角速度陀螺将测量俯仰、滚转、偏航角速率信号,航姿系统将无人机的俯仰角和滚转角信号送至飞控计算机的输入端,卫星信号接收机将无人机的高度、地速和位置信息送至飞控计算机的输入端;飞控计算机解算出升降舵舵面偏转角度与油门调节角度控制量,控制输出端连接的升降舵机和油门舵机。
[0017]
纵向轨迹控制律中所用到的俯仰角、俯仰角速率、高度、速度等参数都可由相应的传感器测量得到。各个控制参数可通过控制律设计与仿真得到,具体来说先通过线性化仿真根据时域、频域分析得到满足控制性能的参数范围,然后利用无人机六自由度非线性模型进行时域分析与参数选优,确定最终参数。
[0018]
有益效果
[0019]
本发明提出的一种无人机撞绳回收纵向轨迹控制方法及控制系统,适用于天钩回收型无人机的高精度撞绳回收。应用本发明提出的纵向轨迹控制方法,可以把高度与速度进行解耦控制,并通过姿态约束使得无人机在撞绳回收时的速度、高度与俯仰角均在最佳范围内。这种方式能够大幅提高一次撞绳成功率,实现高精度的撞绳点控制以及速度与姿态控制,既避免了因控制精度低导致频繁复飞带来的时间成本与风险增加,也避免了撞绳时由于撞击点不够精确或速度过大导致的机翼损伤或使用寿命下降。
[0020]
本发明控制方法,大幅提高在苛刻的时间与速度约束条件下的高度控制精度与抗风性能,提高一次撞绳成功率,并使得撞绳点最优,降低无人机撞绳损伤概率,提高使用寿命。
附图说明
[0021]
图1为无人机撞绳回收过程示意图
[0022]
图2为撞绳回收过程纵向决策流程图
[0023]
图3为撞绳回收过程纵向控制结构图
具体实施方式
[0024]
现结合实施例、附图对本发明作进一步描述:
[0025]
如图1与图2所示,分别为无人机撞绳回收过程示意图和纵向决策流程图。当天钩回收无人机进入回收模态后,无人机从当前高度下滑到撞绳高度,并在此高度上对准预期撞绳点保持定高飞行。当飞行至距捕获绳一定距离的决策窗口时,自动判断高度偏差、速度偏差以及航迹偏差是否满足窗口要求,任意一个要素不满足窗口要求则退出撞绳回收模态,复飞后再次进入回收。如果无人机到达决策窗口时所有要素均满足窗口要求,则继续保持速度约束下的定高飞行,直到机翼撞到绳索。在此期间,无人机纵向控制律为俯仰角限制条件下的高度与速度解耦控制。
[0026]
如图3所示,给出了撞绳回收过程纵向控制结构,该控制系统包括的部件有:角速率陀螺、航姿系统、卫星信号接收机、飞控计算机、升降舵机与油门舵机。角速率陀螺用于测量无人机的俯仰、滚转、偏航角速率;航姿系统用于测量无人机的俯仰角和滚转角;卫星信号接收机用于测量无人机的高度、地速和位置信息;升降舵机、油门舵机分别用于执行相应的伺服运动指令,飞控计算机用于采集各个传感器的测量信息和指令信息,进行控制律解算,并输出各个通道的控制量。在撞绳回收纵向轨迹控制系统中,飞控计算机中实时运行控制律程序,将从各个传感器采集得到俯仰角速率、俯仰角、高度、地速以及从预期指令得到高度与地速指令输入纵向轨迹控制律,解算出升降舵舵面偏转角度与油门调节角度控制量,驱动相应的舵机运动,进而改变无人机的高度、速度与姿态,在有限的时间内把这些参数与预期值的偏差调整到要求范围内,最终成功实现撞绳回收。
[0027]
高度与速度解耦控制律:
[0028][0029][0030]
其中δe为升降舵控制量;δθ为无人机俯仰角偏差量;q为俯仰角速率;δh为高度偏差量;δv为速度偏差量;δ
t
为发动机油门控制量;m为无人机质量;g为重力加速度;为高度变化率;v为速度;为速度变化率;k
θ
为俯仰角放大系数;kq为俯仰角速率放大系数;k
he
为升降舵对高度控制的放大系数;k
ve
为升降舵对速度控制的放大系数;k
hi
为高度积分控制系数;k
tp
与k
ti
分别为相应的解耦控制系数。所有的参数均可由传感器测量得到,所有的控制系数均可通过无人机线性化与六自由度非线性仿真确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。