技术特征:
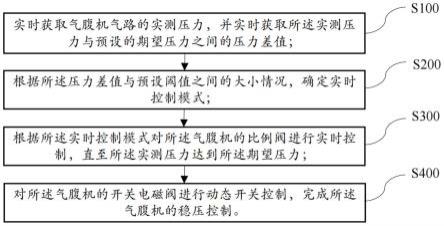
1.一种气腹机稳压控制方法,其特征在于,包括:实时获取气腹机气路的实测压力,并实时获取所述实测压力与预设的期望压力之间的压力差值;根据所述压力差值与预设阈值之间的大小情况,确定实时控制模式;根据所述实时控制模式对所述气腹机的比例阀进行实时控制,直至所述实测压力达到所述期望压力;对所述气腹机的开关电磁阀进行动态开关控制,完成所述气腹机的稳压控制。2.根据权利要求1所述的气腹机稳压控制方法,其特征在于,所述实时控制模式包括流量控制模式和压力控制模式;所述根据所述压力差值与预设阈值之间的大小情况,确定实时控制模式,包括:当所述压力差值大于所述预设阈值时,确定所述实时控制模式具体为所述流量控制模式;当所述压力差值小于或等于所述预设阈值时,确定所述实时控制模式具体为所述压力控制模式。3.根据权利要求2所述的气腹机稳压控制方法,其特征在于,当确定所述实时控制模式具体为所述流量控制模式时,所述根据所述实时控制模式对所述气腹机的比例阀进行实时控制,直至所述实测压力达到所述期望压力,包括:根据所述流量控制模式对所述气腹机的所述比例阀的开合度进行实时控制,直至所述压力差值小于或等于所述预设阈值;当所述压力差值小于或等于所述预设阈值时,将所述实时控制模式切换为所述压力控制模式,根据所述压力控制模式对所述气腹机的所述比例阀的开合度再次进行实时控制,直至所述实测压力达到所述期望压力。4.根据权利要求3所述的气腹机稳压控制方法,其特征在于,所述根据所述流量控制模式对所述气腹机的所述比例阀的开合度进行实时控制,直至所述压力差值小于或等于所述预设阈值,包括:实时获取所述气腹机气路的实测流量;计算出所述实测流量与预设的最大充气流量之间的流量差值;根据所述流量差值设置所述流量控制模式的第一比例参数和第一积分参数;根据所述第一比例参数、所述第一积分参数和所述流量差值,确定第一pid控制器;基于pid控制方法,根据所述第一pid控制器对所述比例阀的开合度进行实时控制,直至所述压力差值小于或等于所述预设阈值。5.根据权利要求3所述的气腹机稳压控制方法,其特征在于,所述当所述压力差值小于或等于所述预设阈值时,将所述实时控制模式切换为所述压力控制模式,根据所述压力控制模式对所述气腹机的所述比例阀的开合度再次进行实时控制,直至所述实测压力达到所述期望压力,包括:当所述压力差值小于或等于所述预设阈值时,将所述实时控制模式切换为所述压力控制模式;根据所述压力差值设置所述压力控制模式的第二比例参数和第二积分参数;根据所述第二比例参数、所述第二积分参数和所述压力差值,确定第二pid控制器;
基于pid控制方法,根据所述第二pid控制器对所述比例阀的开合度再次进行实时控制,直至所述实测压力达到所述期望压力。6.根据权利要求2所述的气腹机稳压控制方法,其特征在于,当确定所述实时控制模式具体为所述压力控制模式时,所述根据所述控制模式对所述气腹机的比例阀进行实时控制,直至所述实测压力达到所述期望压力,包括:根据所述压力差值设置所述压力控制模式的第三比例参数和第三积分参数;基于pid控制方法,根据所述第三比例参数、所述第三积分参数和所述压力差值,对所述气腹机的所述比例阀的开合度进行实时控制,直至所述实测压力达到所述期望压力。7.根据权利要求1至6任一项所述的气腹机稳压控制方法,其特征在于,所述对所述气腹机的开关电磁阀进行动态开关控制,完成所述气腹机的稳压控制,包括:当所述实测压力与所述期望压力相等时,控制所述气腹机的开关电磁阀断开;当所述实测压力小于所述期望压力,且所述压力差值小于或等于所述预设阈值时,控制所述气腹机的开关电磁阀闭合,直至所述实测压力与所述期望压力相等;循环往复,使得所述实测压力与所述期望压力动态相等。8.一种气腹机稳压控制系统,其特征在于,包括:数据获取模块,用于实时获取气腹机气路的实测压力,并实时获取所述实测压力与预设的期望压力之间的压力差值;模式确定模块,与所述数据获取模块通信连接,用于根据所述压力差值与预设阈值之间的大小情况,确定实时控制模式;实时控制模块,与所述数据获取模块和所述模式确定模块通信连接,用于根据所述实时控制模式对所述气腹机的比例阀进行实时控制,直至所述实测压力达到所述期望压力;电磁阀动态控制模块,与所述数据获取模块和所述实时控制模块通信连接,用于对所述气腹机的开关电磁阀进行动态开关控制,完成所述气腹机的稳压控制。9.一种气腹机稳压控制装置,其特征在于,包括处理器、存储器和存储在所述存储器中且可运行在所述处理器上的计算机程序,所述计算机程序运行时实现如权利要求1至7任一项权利要求所述的方法步骤。10.一种气腹机,其特征在于,包括:设有气路的气腹机本体;电源,设于所述气腹机本体上;压力传感器,设于所述气腹机本体上,与所述电源电连接;比例阀,设于所述气腹机本体上,与所述气路连通,与所述电源电连接;开关电磁阀,设于气腹机本体上,与所述气路连通,与所述电源电连接;以及如权利要求9所述的气腹机稳压控制装置,设于所述气腹机本体上,与所述电源、所述压力传感器、所述比例阀和所述开关电磁阀均电连接。
技术总结
本发明公开了一种气腹机及其稳压控制方法、系统和装置,方法包括:实时获取气腹机气路的实测压力,并实时获取实测压力与预设的期望压力之间的压力差值;根据压力差值与预设阈值之间的大小情况,确定实时控制模式;根据实时控制模式对气腹机的比例阀进行实时控制,直至实测压力达到期望压力;对气腹机的开关电磁阀进行动态开关控制,完成气腹机的稳压控制。本发明能真正实现气腹机的稳压控制,误差小、控制精准度高、稳定性好,在气腹机气路的实测压力与期望压力之间的差距较大或较小的情况,甚至是实测压力无限接近期望压力的情况下,都能达到稳压控制的目的,适用于气腹机的整个稳压控制阶段。控制阶段。控制阶段。
技术研发人员:陈东 孙倩 吴兵 薛寒 马少波
受保护的技术使用者:新光维医疗科技(苏州)股份有限公司
技术研发日:2022.06.08
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。