1.本发明实施例涉及光伏板维护技术领域,尤其涉及一种光伏清扫机器人的姿态控制方法和光伏清扫机器人。
背景技术:
2.自然环境中的灰尘沉降在光伏组件表面会造成发电量减少,并可能会引发热斑等组件故障。使用光伏清扫机器人定期清扫组件,可以减少因灰尘沉降造成的发电量损失。
3.目前,清扫机器人在运行过程中,由于障碍物阻挡、电机转速失调等原因,光伏清扫机器人可能会出现姿态偏斜,若不及时纠正,可能会导致清扫效果变差、机器人卡死等不良后果,严重时甚至会对组件及清扫机器人自身造成损伤。现有技术中光伏清扫机器人姿态判断还存在不足,采集的姿态参数不能很好的反映清扫机器人的三维姿态,导致清扫机器人偏转姿态不能及时纠正,存在运行安全隐患。
技术实现要素:
4.本发明提供一种光伏清扫机器人的姿态控制方法及控制装置,提高清扫机器人的姿态检测精度,提高清扫机器人运行的安全性。
5.第一方面,本发明实施例提供一种光伏清扫机器人的姿态控制方法,包括:
6.根据集成加速度计、陀螺仪和磁力计的感应装置获取清扫机器人运动时的三维姿态参数和行驶航向;
7.根据所述三维姿态参数确定所述清扫机器人的偏转状态;
8.根据所述偏转状态和所述行驶航向调节所述清扫机器人的姿态。
9.可选的,在获取清扫机器人运动时的姿态参数和行驶航向之前,还包括:
10.获取清扫机器人的初始姿态参考系;
11.根据所述初始姿态参考系设定所述清扫机器人正常姿态下的参数范围。
12.可选的,根据所述三维姿态参数确定所述清扫机器人的偏转状态包括:
13.判断所述三维姿态参数是否在所述参数范围内;
14.在所述三维姿态参数未在所述参数范围时,根据所述三维姿态参数和所述参数范围确定所述清扫机器人的偏转状态。
15.可选的,根据所述三维姿态参数和所述参数范围确定所述清扫机器人的偏转状态之后,还包括:
16.获取所述三维姿态参数未在所述参数范围内的持续时间;
17.根据所述偏转状态和所述行驶航向调节所述清扫机器人的姿态,包括:
18.在所述持续时间小于预设时间时,根据所述偏转状态和所述行驶航向调节驱动模块的驱动转速。
19.可选的,所述三维姿态参数包括俯仰角;
20.根据所述偏转状态和所述行驶航向调节所述清扫机器人的姿态,还包括:
21.所述俯仰角未在所述参数范围内的持续时间大于所述预设时间时,所述清扫机器人停止运行。
22.可选的,所述初始姿态参考系包括初始偏航轴,在所述清扫机器人正常姿态下的俯视平面上,所述初始偏航轴与所述清扫机器人的预设的行驶方向垂直;所述驱动模块包括第一驱动单元和第二驱动单元;沿所述行驶方向,所述第一驱动单元和所述第二驱动单元设置在所述清扫机器人的两侧;所述第一驱动单元和所述第二驱动单元用于提供所述清扫机器人的运动的动力;其中,从所述清扫机器人的几何中心向所述第一驱动单元连线的延伸方向指向所述初始偏航轴的正向的一侧;从所述清扫机器人的几何中心向所述第二驱动单元连线的延伸方向指向所述初始偏航轴的反向的一侧;
23.所述三维姿态参数包括偏航角;根据所述三维姿态参数和所述参数范围确定所述清扫机器人的偏转状态,包括:
24.若所述偏航角大于所述参数范围的偏航角上限角度,则判定所述清扫机器人相对于所述初始偏航轴的正方向存在顺时针偏转;
25.若所述偏航角小于所述参数范围的偏航角下限角度,则判定所述清扫机器人相对于所述初始偏航轴的正方向上存在逆时针偏转。
26.可选的,根据所述偏转状态和所述行驶航向调节驱动模块的驱动转速,包括;
27.当所述清扫机器人相对于所述初始偏航轴的正方向存在顺时针偏转,所述行驶航向为正向航向时,则提高所述第一驱动单元的驱动转速和/或降低所述第二驱动单元的驱动转速;
28.当所述清扫机器人相对于所述初始偏航轴的正方向存在顺时针偏转,所述行驶航向为反向航向时,则提高所述第二驱动单元的驱动转速和/或降低所述第一驱动单元的驱动转速;其中,所述清扫机器人相对于所述初始偏航轴的正方向存在逆时针偏转的一侧为所述正向航向,所述清扫机器人相对于所述初始偏航轴的正方向存在顺时针偏转的一侧为所述反向航向。
29.可选的,根据所述偏转状态和所述行驶航向调节驱动模块的驱动转速,还包括:
30.当所述清扫机器人相对于所述初始偏航轴的正方向上存在逆时针偏转,所述行驶航向为所述正向航向时,则提高所述第二驱动单元的驱动转速和/或降低所述第一驱动单元的驱动转速;
31.当所述清扫机器人相对于所述初始偏航轴的正方向上存在逆时针偏转,所述行驶航向为所述反向航向时,则提高所述第一驱动单元驱动转速为和/或降低所述第二驱动单元的驱动转速。
32.可选的,所述三维姿态参数还包括横滚角;所述初始姿态参考系还包括初始横滚轴,在所述清扫机器人正常姿态下的侧视平面,所述初始横滚轴的延伸方向平行于光伏板表面;
33.根据所述三维姿态参数和所述参数范围确定所述清扫机器人的偏转状态,还包括:
34.若所述横滚角大于所述参数范围的横滚角上限角度,则判定所述清扫机器人相对于所述初始横滚轴的正方向存在顺时针偏转;
35.若所述横滚角小于所述参数范围的横滚角下限角度,则判定所述清扫机器人相对
于所述初始横滚轴的正方向上存在逆时针偏转。
36.可选的,根据所述偏转状态和所述行驶航向调节驱动模块的驱动转速,包括;
37.当所述清扫机器人相对于所述初始横滚轴的正方向存在顺时针偏转,所述行驶航向为正向航向时,则提高所述第一驱动单元和所述第二驱动单元的驱动转速;
38.当所述清扫机器人相对于所述初始横滚轴的正方向存在顺时针偏转,所述行驶航向为反向航向时,则降低所述第一驱动单元和所述第二驱动单元的驱动转速;其中,所述初始横滚轴的正方向的延伸方向为所述正向航向,所述初始横滚轴的正方向的相反方向为所述反向航向。
39.可选的,根据所述偏转状态和所述行驶航向调节驱动模块的驱动转速,还包括;
40.当所述清扫机器人相对于所述初始横滚轴的正方向存在逆时针偏转,所述行驶航向为正向航向时,则降低所述第一驱动单元和所述第二驱动单元的驱动转速;
41.当所述清扫机器人相对于所述初始横滚轴的正方向存在逆时针偏转,所述行驶航向为反向航向时,则提升所述第一驱动单元和所述第二驱动单元的驱动转速。
42.第二方面,本发明实施例提供一种光伏清扫机器人的姿态控制装置,包括驱动模块、感应装置和控制模块;
43.感应装置,用于获取清扫机器人运动时的三维姿态参数和行驶航向;其中,所述感应装置集成加速度计、陀螺仪和磁力计;
44.确定模块,用于根据所述三维姿态参数确定所述清扫机器人的偏转状态;
45.控制模块,用于根据所述偏转状态和所述行驶航向调节所述清扫机器人的姿态。
46.可选的,所述清扫机器人包括停机报警模块;所述确定模块还包括判断单元;
47.所述判断单元,用于判断所述三维姿态参数是否在所述清扫机器人正常姿态下的参数范围内;
48.若所述三维姿态参数未在所述参数范围内,所述控制模块还用于获取所述三维姿态参数未在所述参数范围内的持续时间;
49.在所述持续时间大于预设时间时,所述停机报警模块用于将所述驱动模块停机。
50.本发明实施例提供的技术方案,通过获取清扫机器人运动时的三维姿态参数和行驶航向,在同一个参考标准下,获知了清扫机器人运动时的三维姿态参数,则可以根据三维姿态参数确定清扫机器人当前的偏转状态,结合清扫机器人行走方向,调节清扫机器人的姿态,利用三维姿态参数分析清扫机器人的偏转状态,提高了清扫机器人的姿态检测精度,从而根据清扫机器人的姿态及时干预调节,进而提高了清扫机器人运行的安全性。
附图说明
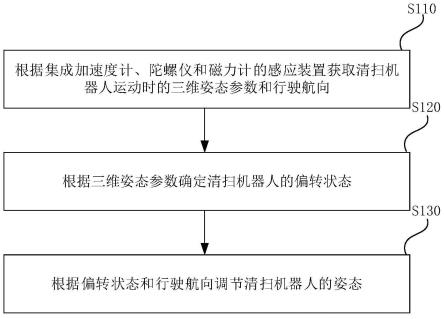
51.图1为本发明实施例提供的一种光伏清扫机器人的姿态控制方法的流程图。
52.图2为本发明实施例提供的一种清扫机器人偏航状态下的示意图。
53.图3为本发明实施例提供的又一种清扫机器人偏航状态下的示意图。
54.图4为本发明实施例提供的一种光伏清扫机器人的姿态控制方法的流程图。
55.图5为本发明实施例提供的一种清扫机器人偏航角正常状态下的示意图。
56.图6为本发明实施例提供的一种清扫机器人横滚角正常状态下的示意图。
57.图7为本发明实施例提供的一种清扫机器人俯仰角正常状态下的示意图。
58.图8为本发明实施例提供的一种清扫机器人横滚角偏转状态下的示意图。
59.图9为本发明实施例提供的又一种清扫机器人横滚角偏转状态下的示意图。
60.图10为本发明实施例提供的一种清扫机器人俯仰角偏转状态下的示意图。
61.图11为本发明实施例提供的又一种清扫机器人俯仰角偏转状态下的示意图。
62.图12为本发明实施例提供的又一种光伏清扫机器人的姿态控制方法的流程图。
63.图13为本发明实施例提供的一种光伏清扫机器人的偏航角姿态控制方法的流程图。
64.图14为本发明实施例提供的一种光伏清扫机器人的横滚角姿态控制方法的流程图。
65.图15为本发明实施例提供的一种光伏清扫机器人的俯仰角姿态控制方法的流程图。
66.图16为本发明实施例提供的一种光伏清扫机器人的姿态控制装置结构示意图。
具体实施方式
67.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
68.现有的光伏板清扫机器人包括设置在机壳两侧的驱动轮,在电机驱动下两侧的驱动轮沿着光伏板的外边框行走,但是在行走过程中,当两侧的驱动轮的驱动转速因阻力产生不一致或光伏板的安装缺陷等因素,会导致光伏板清扫机器人出现偏斜,从而影响清扫机器人的运行安全性。
69.有鉴于此,图1为本发明实施例提供的一种光伏清扫机器人的姿态控制方法的流程图,本实施例可适用于光伏清扫机器人姿态调整情况,该方法可以由光伏清扫机器人来执行,可采用硬件和/或软件的方式来实现。该方法具体包括如下步骤:
70.s110、根据集成加速度计、陀螺仪和磁力计的感应装置获取清扫机器人运动时的三维姿态参数和行驶航向;
71.具体的,清扫机器人用于清扫光伏板,通常清扫机器人设置在光伏板表面,三维姿态参数是清扫机器人在执行清扫过程中,实时采集的清扫机器人的三维姿态数据,示例性的,三维姿态参数可以利用集成加速度计、陀螺仪和磁力计的感应装置进行采集,示例性的,感应装置包括九轴陀螺仪,其中,九轴陀螺仪集成加速度计、陀螺仪和磁力计,九轴陀螺仪的磁力计可以检测磁场相对于地磁北极的强度,可以作为一个外部基准,来降低陀螺仪漂移误差对偏航角计算的影响,并且九轴陀螺仪技术成熟,可以利用内部集成的加速度计、陀螺仪和磁力计可以直接计算出各姿态数据,无需在主控单元内增加任何算法或程序。相比于使用多个独立传感器汇总的方式采用九轴陀螺仪易于在清扫机器人上集成,可以减少主控板上通讯、电源线路走线,不需要占用主控单元上的通讯口数量。九轴陀螺仪内部集成算法,直接输出计算好的姿态角,可以节约控制模块的计算资源。示例性的,在清扫机器人完成清扫工作回到停车位置时,为了避免陀螺仪长时间工作导致漂移误差,可以对陀螺仪进行归零矫正,提高检测准确性。其中,各姿态数据包括偏航角、横滚角和俯仰角在内的姿
态数据。行驶航向是清扫机器人在光伏板上的运行时的行驶方向,其中,行驶航向通常为光伏板铺设的延伸方向,示例性的,可以通过判断清扫机器人的行走轮的转动方向,进而获得清扫机器人在光伏板上的前进方向。
72.s120、根据三维姿态参数确定清扫机器人的偏转状态;
73.具体的,清扫机器人的三维姿态是基于参考系做出的相对的姿态分析,因此在参考系同一参考轴不同的方向下,清扫机器人的同一个三维姿态参数不能唯一指向。因此,需要在同一参考方向下,分析三维姿态数据。示例性的,清扫机器人可以利用同一类型的陀螺仪建立相同参考系。在同一个参考标准下,当获知了清扫机器人运动时的三维姿态参数,则可以根据三维姿态参数确定清扫机器人当前的偏转状态。其中,偏转状态可以反映清扫机器人偏离航向、高低起伏和脱离光伏板表面的程度。
74.s130、根据偏转状态和行驶航向调节清扫机器人的姿态。
75.具体的,清扫机器人在机壳两侧设置有行走轮,清扫机器人的驱动模块可以提供行走轮的驱动转速,从而带动两侧的行走轮转动,从而使清扫机器人沿着光伏板的外边框行走,当两侧的行走轮的驱动转速或压力不一致时,清扫机器人会产生一定的航向、横滚和俯仰等偏转,从而产生相应的偏转状态。示例性的,当清扫机器人存在异常的偏转状态时,可以通过调整行走轮的驱动转速,来调整清扫机器人两侧的前后姿态,最终使清扫机器人的姿态恢复。例如,当清扫机器人发生航向偏转,可以调整一侧的行走轮加速或减速,使清扫机器人恢复到正常姿态。在清扫机器人工作过程中的具体调整过程需要考虑清扫机器人行走方向,例如,图2为本发明实施例提供的一种清扫机器人偏航状态下的示意图,参见图2,当清扫机器人沿x方向行驶时,若偏航角yaw向顺时针方向偏斜,则可以提高清扫机器人的驱动模块的第一驱动单元201的驱动转速,和/或降低清扫机器人的驱动模块的第二驱动单元202的驱动转速,从而带动行走轮调节清扫机器人的姿态。当清扫机器人沿x方向反方向行驶时,可以提高清扫机器人的驱动模块的第二驱动单元202的驱动转速,和/或降低清扫机器人的驱动模块的第一驱动单元201的驱动转速。图3为本发明实施例提供的又一种清扫机器人偏航状态下的示意图,参见图3,若偏航角yaw向逆时针方向偏斜,当清扫机器人沿x方向行驶时,可以提高清扫机器人的驱动模块的第二驱动单元202的驱动转速,和/或降低清扫机器人的驱动模块的第一驱动单元201的驱动转速。当清扫机器人沿x方向反方向行驶时,则可以提高清扫机器人的驱动模块的第一驱动单元201的驱动转速,和/或降低清扫机器人的驱动模块的第二驱动单元202的驱动转速,从而带动行走轮调节清扫机器人的姿态。
76.本发明实施例提供的技术方案,通过感应装置获取清扫机器人运动时的三维姿态参数和行驶航向,在同一个参考标准下,获取清扫机器人运动时的三维姿态参数,则可以根据三维姿态参数确定清扫机器人当前的偏转状态,结合清扫机器人行走方向,调节清扫机器人的姿态,利用三维姿态参数分析清扫机器人的偏转状态,仅通过一个感应装置即可检测三维姿态数据,降低清扫机器人的集成复杂度,提高了清扫机器人的姿态检测精度,从而根据清扫机器人的姿态及时干预调节,进而提高了清扫机器人运行的安全性。
77.图4为本发明实施例提供的一种光伏清扫机器人的姿态控制方法的流程图,参见图4,步骤如下:
78.s310、获取清扫机器人的初始姿态参考系;
79.具体的,初始姿态参考系为清扫机器人在初始位置时正常姿态的参考坐标系,其
中,初始位置为工程人员设定的标准位置,在标准位置上清扫机器人可以保持正常姿态。其中,参考坐标系包括初始偏航轴yaw-init、初始横滚轴roll-init和初始俯仰轴pitch-init,利用初始偏航轴yaw-init、初始横滚轴roll-init和初始俯仰轴pitch-init建立一致的三维姿态参数的参考标准。示例性的,图5为本发明实施例提供的一种清扫机器人偏航角正常状态下的示意图,图6为本发明实施例提供的一种清扫机器人横滚角正常状态下的示意图,图7为本发明实施例提供的一种清扫机器人俯仰角正常状态下的示意图,参见图5-7,图5为清扫机器人和光伏组件俯视图的示意图,光伏组件520一排排列,清扫机器人510横跨光伏组件520,示例性的,初始偏航轴yaw-init经过清扫机器人510的几何中心,初始偏航轴yaw-init与光伏组件520的侧边平行并与行驶航向垂直。图6为清扫机器人和光伏组件aa方向的侧视图的示意图,示例性的,初始横滚轴roll-init经过清扫机器人510的几何中心,初始横滚轴roll-init与光伏组件520的表面平行并与行驶航向平行。图7为清扫机器人和光伏组件bb方向的侧视图的示意图,示例性的,初始俯仰轴pitch-init经过清扫机器人510的几何中心,在该平面上,初始俯仰轴pitch-init与光伏组件520的表面平行。
80.s320、根据初始姿态参考系设定清扫机器人正常姿态下的参数范围。
81.具体的,清扫机器人在理想状态三维姿态的偏转较小,即偏航角、横滚角和俯仰角参数偏转较小,但光伏组件由于安装地形限制存在高低起伏和倾斜等情况,因此清扫机器人存在一定范围的姿态偏转浮动,根据光伏组件的铺设实际情况确定姿态偏转浮动的范围,结合初始姿态参考系可以设定出参数范围,其中,参数范围包括偏航角上下限角度、横滚角上下限角度和俯仰角上下限角度等参数。偏航角上下限角度是清扫机器人在运动时偏航角的最大角度和最小角度,横滚角上下限角度是清扫机器人在运动时偏航角的最大角度和最小角度,俯仰角上下限角度是清扫机器人在运动时俯仰角的最大角度和最小角度,如果获取的三维姿态参数在参数范围内,则可以认为清扫机器人处在正常姿态的状态。如果获取的三维姿态参数未在参数范围内,则可以认为清扫机器人处在异常姿态的状态。
82.示例性的,继续参见图2和图3,示例性的,设定初始偏航轴yaw-init的正方向为y方向,若清扫机器人相对于初始偏航轴yaw-init的正方向发生顺时针偏转,则偏转的最大角度称为偏航角上限角度yaw-max,清扫机器人相对于初始偏航轴yaw-init的正方向发生逆时针偏转,则偏转的的最大角度称为偏航角下限角度yaw-min。图8为本发明实施例提供的一种清扫机器人横滚角偏转状态下的示意图,图9为本发明实施例提供的又一种清扫机器人横滚角偏转状态下的示意图,参见图8和图9,示例性的,设定初始横滚轴roll-init的正方向为x1方向,若清扫机器人相对于初始横滚轴roll-init的正方向发生顺时针偏转,则偏转的最大角度称为横滚角上限角度roll-max,清扫机器人相对于初始横滚轴roll-init的正方向发生逆时针偏转,则偏转的最大角度称为横滚角下限角度roll-min。图10为本发明实施例提供的一种清扫机器人俯仰角偏转状态下的示意图,图11为本发明实施例提供的又一种清扫机器人俯仰角偏转状态下的示意图,参见图10和图11,示例性的,设定初始俯仰轴pitch-init的正方向为x2方向,若清扫机器人相对于初始俯仰轴pitch-init的正方向发生顺时针偏转,则偏转的最大角度称为俯仰角上限角度pitch-max,清扫机器人相对于初始俯仰轴pitch-init的正方向发生逆时针偏转,则偏转的最大角度称为俯仰角下限角度pitch-min。
83.s330、获取清扫机器人运动时的三维姿态参数和行驶航向;
84.具体的,实时获取清扫机器人运动时的三维姿态参数和行驶航向。
85.s340、根据三维姿态参数确定清扫机器人的偏转状态;
86.具体的,在同一个参考标准,根据三维姿态参数确定清扫机器人当前的偏转状态。
87.s350、根据偏转状态和行驶航向调节清扫机器人的姿态。
88.具体的,结合清扫机器人行走方向,当清扫机器人存在异常的偏转状态时,可以通过调整清扫机器人的驱动模块,使清扫机器人姿态恢复。
89.基于上述实施例,可选的,根据三维姿态参数确定清扫机器人的偏转状态包括:
90.判断三维姿态参数是否在参数范围内;
91.在三维姿态参数未在参数范围时,根据三维姿态参数和参数范围确定清扫机器人的偏转状态。
92.具体的,光伏组件由于安装地形限制存在高低起伏和倾斜等情况,因此清扫机器人存在一定范围的姿态偏转浮动,根据姿态偏转浮动结合初始参考系可以设定出参数范围,判断三维姿态参数是否在参数范围内,如果三维姿态参数在参数范围内,则可以认为清扫机器人处于正常姿态。如果三维姿态参数不在参数范围内,则表示清扫机器人的偏转状态存在异常,需要调整清扫机器人姿态。根据三维姿态参数的具体参数,以及偏航角上下限角度、横滚角上下限角度和俯仰角上下限角度等参数可以确定清扫机器人的具体偏转状态。示例性的,确定清扫机器人偏航角的偏转状态的过程为:继续参见图2和图3,根据采集的三维姿态参数中的偏航角yaw,确定偏航角yaw和偏航角上限角度yaw-max与偏航角下限角度yaw-min的关系,如果偏航角yaw大于偏航角上限角度yaw-max,则可以得到清扫机器人相对于初始偏航轴yaw-init的正方向顺时针方向偏斜。如果偏航角yaw小于偏航角下限角度yaw-min,则可以得到清扫机器人相对于初始偏航轴yaw-init的正方向逆时针方向偏斜。同样的,根据三维姿态参数和参数范围可以确定清扫机器人的横滚角、俯仰角偏转状态,具体过程在此不再赘述。
93.图12为本发明实施例提供的又一种光伏清扫机器人的姿态控制方法的流程图,参见图12,步骤如下:
94.s410、获取清扫机器人初始姿态参考系;
95.s420、根据初始姿态参考系设定清扫机器人正常姿态下的参数范围。
96.s430、获取清扫机器人运动时的三维姿态参数和行驶航向;
97.s440、判断三维姿态参数是否在参数范围内;
98.具体的,当三维姿态参数在参数范围内时,例如偏转角、横滚角和俯仰角均在各自上下限角度范围内,则认为清扫机器人的姿态正常,无需进行后续调整。
99.s450、在三维姿态参数未在参数范围时,根据三维姿态参数和参数范围确定清扫机器人的偏转状态。
100.s460、获取三维姿态参数未在参数范围内的持续时间;
101.具体的,记录三维姿态参数未在参数范围内的持续时间t。
102.s470、在持续时间小于预设时间时,根据偏转状态和行驶航向调节驱动模块的驱动转速。
103.具体的,判断持续时间t是否超过预设时间t1,若持续时间t超过预设时间t1,则说明清扫机器人长时间处于姿态异常状态,通过简单调整不能使清扫机器人恢复,需要将清
扫机器人进行停机,同时可以进一步的发出故障报警,提示工程人员进行检修排查。
104.若持续时间t未超过预设时间t1,则对清扫机器人异常的偏转状态进行调整,可以通过调整行走轮的驱动转速,使清扫机器人姿态恢复。例如,当清扫机器人发生航向偏转,可以调整驱动模块的驱动转速,进而带动行走轮的转速变化,通过行走轮的加速或减速来调整清扫机器人姿态。其中,光伏组件铺设时存在高低起伏的情况,清扫机器人在运行中需要爬坡或下坡,因此预设时间t1需要考虑清扫机器人完成爬坡或下坡所需的最长时间t2,并预留一个缓冲时间t3,预设时间t1=t2 t3。其中,预留时间的大小可以根据光伏组件铺设时的具体路径及铺设环境进行设定。通过持续时间t和预设时间t1的比较,持续时间t大于预设时间t1时,则清扫机器人处于长时间姿态异常,及时关闭清扫机器人并可以通过提示报警提醒工程人员,提高清扫机器人运行安全性。当持续时间t小于预设时间t1,可以及时通过调整行走轮的驱动转速,使清扫机器人姿态恢复,提高清扫机器人运行稳定性。
105.可选的,初始姿态参考系包括初始偏航轴yaw-init,在清扫机器人正常姿态下的俯视平面上,初始偏航轴yaw-init与清扫机器人的预设的行驶方向垂直;驱动模块包括第一驱动单元和第二驱动单元;沿行驶方向,第一驱动单元和第二驱动单元设置在清扫机器人的两侧;第一驱动单元和第二驱动单元用于提供清扫机器人的运动的动力,其中,从清扫机器人的几何中心向第一驱动单元连线的延伸方向指向初始偏航轴yaw-init的正向的一侧;从清扫机器人的几何中心向第二驱动单元连线的延伸方向指向初始偏航轴yaw-init的反向的一侧。
106.三维姿态参数包括偏航角;根据三维姿态参数和参数范围确定清扫机器人的偏转状态,包括:
107.若偏航角大于参数范围的偏航角上限角度,则判定清扫机器人相对于初始偏航轴的正方向存在顺时针偏转;
108.若偏航角小于参数范围的偏航角下限角度,则判定清扫机器人相对于初始偏航轴的正方向上存在逆时针偏转。
109.具体的,继续参见图5,第一驱动单元201和第二驱动单元202设置在清扫机器人的两侧,清扫机器人沿着光伏板的外边框行走,示例性的,初始偏航轴yaw-init经过清扫机器人的几何中心。初始偏航轴yaw-init与清扫机器人的正常姿态的航行方向垂直。设定初始偏航轴yaw-init的正方向为初始偏航轴yaw-init的一端,本发明实施例示例性的,设定初始偏航轴yaw-init的正方向为y方向,将几何中心y方向一侧的第一驱动单元201定义为上驱动单元,将几何中心y方向的反向一侧的第二驱动单元202定义为下驱动单元。通过定义第一驱动单元201和第二驱动单元202的相对位置,在后续调整过程中可以根据清扫机器人的偏航状态调整第一驱动单元201和第二驱动单元202的驱动转速,调整清扫机器人的三维姿态。
110.结合图5,继续参见图2和图3,初始偏航轴yaw-init的正方向为y方向,清扫机器人相对于初始偏航轴yaw-init的正方向发生顺时针偏转的最大角度称为偏航角上限角度yaw-max,清扫机器人相对于初始偏航轴yaw-init的正方向发生逆时针偏转的最大角度称为偏航角下限角度yaw-min。如果偏航角yaw大于参数范围的偏航角上限角度yaw-max,则表明清扫机器人相对于初始偏航轴yaw-init的正方向存在顺时针偏转,并且超过了合理的顺时针偏转的最大角度。如果偏航角yaw小于参数范围的偏航角下限角度yaw-min,则表明清
扫机器人相对于初始偏航轴yaw-init的正方向存在逆时针偏转,并且超过了合理的逆时针偏转的最大角度。
111.基于上述实施例,可选的,根据偏转状态和行驶航向调节驱动模块的驱动转速,包括;
112.当清扫机器人相对于初始偏航轴yaw-init的正方向存在顺时针偏转,行驶航向为正向航向时,则提高第一驱动单元201的驱动转速和/或降低第二驱动单元202的驱动转速;
113.当清扫机器人相对于初始偏航轴yaw-init的正方向存在顺时针偏转,行驶航向为反向航向时,则提高第二驱动单元202和/或降低第一驱动单元201的驱动转速;其中,清扫机器人相对于初始偏航轴yaw-init的正方向存在逆时针偏转的一侧为正向航向,清扫机器人相对于初始偏航轴yaw-init的正方向存在顺时针偏转的一侧为反向航向。
114.具体的,参见图2,示例性的,清扫机器人相对于初始偏航轴yaw-init的正方向存在逆时针偏转的一侧为正向航向,即x方向,当清扫机器人沿正向航向行驶,并且采集的偏航角大于偏航角上限角度yaw-max时,可以提升第一驱动单元201的驱动转速,从而带动清扫机器人的行走轮加速,从而调整清扫机器人至两侧相对平行,在调整清扫机器人姿态期间仍实时获取偏航角yaw,当偏航角yaw再次落入参数范围内,可以将第一驱动单元201的驱动转速从当前转速再次调整为预设转速。或,还可以降低第二驱动单元202的驱动转速,从而调整清扫机器人至两侧相对平行,调整期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内,可以将第二驱动单元202的驱动转速从当前转速再次调整为预设转速。或,提升第一驱动单元201的驱动转速,并降低第二驱动单元202的驱动转速,从而调整清扫机器人至两侧相对平行,调整期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内,可以将第一驱动单元201和第二驱动单元202的从当前转速再次调整为预设转速。
115.进一步的,当清扫机器人沿反向航向行驶,其中,清扫机器人相对于初始偏航轴yaw-init的正方向存在顺针偏转的一侧为反向航向,即x方向的相反方向,若采集的偏航角yaw大于偏航角上限角度yaw-max时,可以提升第二驱动单元202的驱动转速,从而带动清扫机器人的行走轮加速,从而调整清扫机器人至两侧相对平行,调整姿态期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内,将第二驱动单元202的驱动转速从当前转速再次调整为预设转速。或,可以降低第一驱动单元201的驱动转速从而带动清扫机器人的行走轮加速,从而调整清扫机器人至两侧相对平行,调整姿态期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内,将第一驱动单元201的驱动转速从当前转速再次调整为预设转速。或,提升第二驱动单元202的驱动转速,并降低第一驱动单元201的驱动转速,从而调整清扫机器人至两侧相对平行,调整期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内,可以将第一驱动单元201和第二驱动单元202的从当前转速再次调整为预设转速。
116.基于上述实施例,可选的,根据偏转状态和行驶航向调节驱动模块的驱动转速,还包括:
117.当清扫机器人相对于初始偏航轴yaw-init的正方向上存在逆时针偏转,行驶航向为正向航向时,则提高第二驱动单元202的驱动转速和/或降低第一驱动单元201的驱动转速;
118.当清扫机器人相对于初始偏航轴yaw-init的正方向上存在逆时针偏转,行驶航向为反向航向时,则提高第一驱动单元201的驱动转速和/或降低第二驱动单元202的驱动转
速。
119.具体的,参见图3,当清扫机器人沿正向航向行驶,并且采集的偏航角yaw小于偏航角下限角度yaw-min时,可以提升第二驱动单元202的驱动转速,调整姿态期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内,可以将第二驱动单元202的驱动转速从当前转速再次调整为预设转速。或,将降低第一驱动单元201的驱动转速,调整期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内,将第一驱动单元201的驱动转速从当前转速再次调整为预设转速。或,提升第二驱动单元202的驱动转速,并降低第一驱动单元201的驱动转速,调整期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内,将第一驱动单元201和第二驱动单元202的驱动转速从当前转速再次调整为预设转速。
120.当清扫机器人沿反向航向行驶,并且采集的偏航角yaw小于偏航角下限角度yaw-min时,可以提升第一驱动单元201的驱动转速,调整清扫机器人姿态,调整姿态期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内,可以将第一驱动单元201的驱动转速从当前再次调整为预设转速。或,降低第二驱动单元202的驱动转速,调整清扫机器人姿态,调整期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内时,第二驱动单元202的驱动转速从当前转速再次调整为预设转速。或,提升第一驱动单元201的驱动转速,并降低第二驱动单元202的驱动转速,调整清扫机器人姿态,调整期间实时获取偏航角yaw,当偏航角yaw再次落入参数范围内时,第一驱动单元201和第二驱动单元202的驱动转速从当前转速再次调整为预设转速。
121.图13为本发明实施例提供的一种光伏清扫机器人的偏航角姿态控制方法的流程图,结合图2和图3,参见图13,示例性的,清扫机器人以正常姿态运动时,第一驱动单元201和第二驱动单元202驱动转速为预设转速,清扫机器人加速时的驱动转速为第一转速w_acc,并且第一转速w_acc大于预设转速,清扫机器人减速时的驱动转速为第二转速w_dec,并且第二转速w_dec小于预设转速。
122.方法步骤如下:
123.s501、获取清扫机器人正常姿态时的初始参考系,建立参考标准。s502、根据清扫机器人的正常姿态确定参数范围中偏航角上限角度和偏航角下限角度,形成合理区间。s503、实时获取清扫机器人运行时的偏航角yaw。s504、判断偏航角是否超出参数范围的合理区间。s505、若未超出,则第一驱动单元201和第二驱动单元202的驱动转速不变,并返步骤s503。s506、若超出,则判断超出参数范围的持续时间是否超出预设时间。s507、若持续时间超出预设时间,则关闭清扫机器人运行,并发出故障报警。s508、若持续时间未超出预设时间,则调整第一驱动单元201和第二驱动单元202的驱动转速。当偏航角大于偏航角的上限角度,s509、则判断清扫机器人的运行方向。s510、当清扫机器人沿正向航向运行时,将第一驱动单元201的驱动转速从预设转速提升为第一转速w_acc,和/或将第二驱动单元202的驱动转速从预设转速降速为第二转速w_dec。s511、当清扫机器人沿反向航向运行时,将第二驱动单元202的驱动转速从预设转速提升为第一转速w_acc,和/或将第一驱动单元201的驱动转速从预设转速降速为第二转速w_dec。当偏航角小于偏航角的下限角度,s512、则判断清扫机器人的运行方向。s513、当清扫机器人沿正向航向运行时,将第二驱动单元202的驱动转速从预设转速调整为第一转速w_acc,和/或将第一驱动单元201的驱动转速从预设转速降速为第二转速w_dec。s514、当清扫机器人沿反向航向运行时,将第一驱动单元201的
驱动转速从预设转速提升为第一转速w_acc,和/或将第二驱动单元202的驱动转速从预设转速降速为第二转速w_dec。
124.可选的,三维姿态参数还包括横滚角;初始姿态参考系还包括初始横滚轴roll-init;在清扫机器人正常姿态下的侧视平面,初始横滚轴roll-init的延伸方向平行与光伏板表面;
125.根据三维姿态参数和参数范围确定清扫机器人的偏转状态,还包括:
126.若横滚角大于参数范围的横滚角上限角度,则判定清扫机器人相对于初始横滚轴roll-init的正方向存在顺时针偏转;
127.若横滚角小于参数范围的横滚角下限角度,则判定清扫机器人相对于初始横滚轴roll-init的正方向上存在逆时针偏转。
128.具体的,结合图5和图6,参见图8和图9,示例性的,初始横滚轴roll-init经过清扫机器人的几何中心,在清扫机器人的正常姿态下初始横滚轴roll-init与光伏板平行。其中,侧视平面为图5中aa方向侧视平面,设定初始横滚轴roll-init的正方向为初始横滚轴roll-init的一端。设定初始横滚轴roll-init的正方向为x1方向,清扫机器人相对于初始横滚轴roll-init的正方向发生顺时针偏转的最大角度称为横滚角上限角度roll-max,清扫机器人相对于初始横滚轴roll-init的正方向发生逆时针偏转的最大角度称为横滚角下限角度roll-min。如果横滚角roll大于参数范围的横滚角上限角度roll-max,则表明清扫机器人相对于初始横滚轴roll-init的正方向存在顺时针偏转,并且超过了合理的顺时针偏转的最大角度。如果横滚角roll小于参数范围的横滚角下限角度roll-min,则表明清扫机器人相对于初始横滚轴roll-init的正方向存在逆时针偏转,并且超过了合理的逆时针偏转的最大角度。
129.基于上述实施例,可选的,根据偏转状态和行驶航向调节驱动模块的驱动转速,包括;
130.当清扫机器人相对于初始横滚轴roll-init的正方向存在顺时针偏转,行驶航向为正向航向时,则提高第一驱动单元201和第二驱动单元202的驱动转速;
131.当清扫机器人相对于初始横滚轴roll-init的正方向存在顺时针偏转,行驶航向为反向航向时,则降低第一驱动单元201和第二驱动单元202的驱动转速;其中,初始横滚轴roll-init的正方向的延伸方向为正向航向,初始横滚轴roll-init的正方向的相反方向为反向航向。
132.具体的,继续参见图8,初始横滚轴roll-init的正方向的延伸方向为正向航向,即x1方向,当清扫机器人沿正向航向行驶,并且采集的横滚角roll大于横滚角上限角度roll-max时,则判定清扫机器人处于爬坡状态,因此可以提升第一驱动单元201和第二驱动单元202的驱动转速,通过提升驱动转速提高行走轮的驱动力,使清扫机器人可以通过存在坡度的区域。
133.初始横滚轴roll-init的正方向的相反方向为反向航向,即x1方向的相反方向,当清扫机器人沿反向航向行驶,并且采集的横滚角roll大于横滚角上限角度roll-max时,则判定清扫机器人处于下坡状态,可以降低第一驱动单元201和第二驱动单元202的驱动转速,通过降低转速对清扫机器人下坡进行减速缓冲。
134.可选的,根据偏转状态和行驶航向调节驱动模块的驱动转速,还包括;
135.当清扫机器人相对于初始横滚轴roll-init的正方向存在逆时针偏转,行驶航向为正向航向时,则降低第一驱动单元201和第二驱动单元202的驱动转速;
136.当清扫机器人相对于初始横滚轴roll-init的正方向存在逆时针偏转,行驶航向为反向航向时,则提升第一驱动单元201和第二驱动单元202的驱动转速。
137.具体的,参见图9,当清扫机器人沿正向航向行驶,并且采集的横滚角roll小于横滚角下限角度roll-min时,则判定清扫机器人处于下坡状态,可以降低第一驱动单元201和第二驱动单元202的驱动转速,通过降低转速对清扫机器人下坡进行减速缓冲。
138.当清扫机器人沿反向航向行驶,并且采集的横滚角小于横滚角下限角度roll-min时,则判定清扫机器人处于爬坡状态,因此可以提升第一驱动单元201和第二驱动单元202的驱动转速,通过提升驱动转速提高行走轮的驱动力,使清扫机器人可以通过存在坡度的区域。
139.图14为本发明实施例提供的一种光伏清扫机器人的横滚角姿态控制方法的流程图,结合图8和图9,参见图14,示例性的,清扫机器人以正常姿态运动时,第一驱动单元201和第二驱动单元202驱动转速为预设转速,清扫机器人加速时的驱动转速为第一转速w_acc,并且第一转速w_acc大于预设转速,清扫机器人减速时的驱动转速为第二转速w_dec,并且第二转速w_dec小于预设转速。
140.方法步骤如下:
141.s601、获取清扫机器人正常姿态时的初始姿态参考系,建立参考标准。s602、根据清扫机器人的正常姿态确定参数范围中横滚角上限角度和横滚角下限角度,形成合理区间。s603、实时获取清扫机器人运行时的横滚角roll。s604、判断横滚角是否超出参数范围的合理区间。s605、若未超出,则第一驱动单元和第二驱动单元的驱动转速不变,并返步骤s603。s606、若超出,则判断超出参数范围的持续时间是否超出预设时间。s607、若持续时间超出预设时间,则关闭清扫机器人运行,并发出故障报警。s608、若持续时间未超出预设时间,则调整第一驱动单元和第二驱动单元的驱动转速。当横滚角roll大于横滚角上限角度roll-max,s609、则判断清扫机器人的运行方向。s610、当清扫机器人沿正向航向运行时,则判定清扫机器人处于爬坡状态,因此可以将第一驱动单元和第二驱动单元的驱动转速从预设转速提升为第一转速w_acc。s611、当清扫机器人沿反向航向运行时,则判定清扫机器人处于下坡状态,可以降低第一驱动单元和第二驱动单元的驱动转速从预设转速降低为第二转速w_dec。当横滚角小于横滚角的下限角度,s612、则判断清扫机器人的运行方向。s613、当清扫机器人沿正向航向运行时,则判定清扫机器人处于下坡状态,可以将第一驱动单元和第二驱动单元的驱动转速从预设转速降低为第二转速w_dec。s614、当清扫机器人沿反向航向运行时,则判定清扫机器人处于爬坡状态,因此可以将第一驱动单元201和第二驱动单元202的驱动转速从预设转速提升为第一转速w_acc。
142.可选的,三维姿态参数还包括俯仰角;初始姿态参考系还包括初始俯仰轴pitch-init;在清扫机器人正常姿态下bb方向的侧视平面上,初始俯仰轴pitch-init的延伸方向平行与光伏板平面平行;
143.根据三维姿态参数和参数范围确定清扫机器人的偏转状态,还包括:
144.若俯仰角大于参数范围的俯仰角上限角度,则判定清扫机器人相对于初始俯仰轴pitch-init的正方向存在顺时针偏转;
145.若俯仰角小于参数范围的俯仰角下限角度,则判定清扫机器人相对于初始俯仰轴pitch-init的正方向上存在逆时针偏转。
146.基于上述实施例,可选的,根据所述偏转状态和所述行驶航向调节所述清扫机器人的姿态,还包括:
147.俯仰角未在参数范围内的持续时间大于预设时间时,清扫机器人停止运行。
148.具体的,参见图10和图11,示例性的,初始俯仰轴pitch-init经过清扫机器人的几何中心;初始俯仰轴pitch-init的正方向沿光伏板向向图中斜上方延伸,清扫机器人相对于初始俯仰轴pitch-init的正方向发生顺时针偏转的最大角度称为俯仰角上限角度pitch-max,清扫机器人相对于初始俯仰轴pitch-init的正方向发生逆时针偏转的最大角度称为俯仰角下限角度pitch-min。如果俯仰角pitch大于参数范围的俯仰角上限角度,则表明清扫机器人相对于初始俯仰轴pitch-init的正方向存在顺时针偏转,并且超过了合理的顺时针偏转的最大角度。如果俯仰角pitch小于参数范围的俯仰角下限角度,则表明清扫机器人相对于初始俯仰轴pitch-init的正方向存在逆时针偏转,并且超过了合理的逆时针偏转的最大角度。当俯仰角pitch不在合理范围内时,判断未在合理范围内的持续时间是否超过预设时间。若超过预设时间,则将清扫机器人进行停机,并发出故障警报,避免清扫机器人较大的俯仰角导致清扫机器人跌落。
149.图15为本发明实施例提供的一种光伏清扫机器人的俯仰角姿态控制方法的流程图,结合图9和图10,参见图15,步骤如下:
150.s701、获取清扫机器人正常姿态时的初始姿态参考系,建立参考标准。s702、根据清扫机器人的正常姿态确定参数范围中俯仰角上限角度和俯仰角下限角度,形成合理区间。s703、实时获取清扫机器人运行时的俯仰角pitch。s704、判断俯仰角pitch是否超出参数范围的合理区间。s705、若未超出,则第一驱动单元201和第二驱动单元202的驱动转速不变,并返步骤s703。s706、若超出,则判断超出参数范围的持续时间是否超出预设时间。s707、若持续时间超出预设时间,则关闭清扫机器人运行,并发出故障报警。若持续时间未超出预设时间,则第一驱动单元201和第二驱动单元202的驱动转速不变,并返步骤s703。
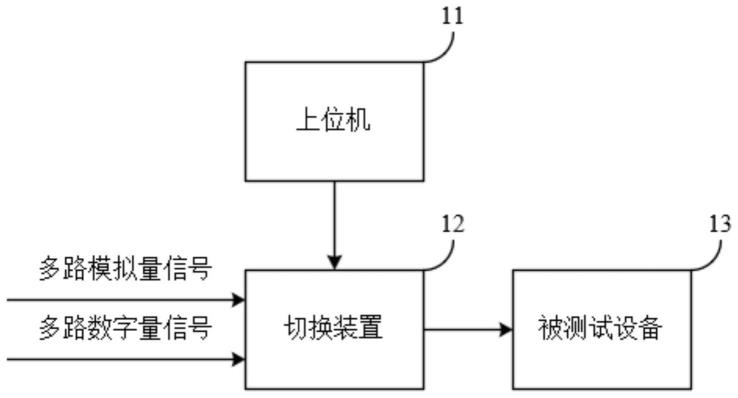
151.图16为本发明实施例提供的一种光伏清扫机器人的姿态控制装置结构示意图,参见图16,光伏清扫机器人包括确定模块620、感应装置610和控制模块630;
152.感应装置610,用于获取清扫机器人运动时的三维姿态参数和行驶航向;其中,感应装置610集成加速度计、陀螺仪和磁力计;
153.确定模块620,用于根据三维姿态参数确定清扫机器人的偏转状态;
154.控制模块630,用于根据偏转状态和行驶航向调节清扫机器人的姿态。
155.具体的,感应装置610集成加速度计、陀螺仪和磁力计,示例性的,示例性的,感应装置包括九轴陀螺仪,其中,九轴陀螺仪集成加速度计、陀螺仪和磁力计,其中,磁力计可以检测磁场相对于地磁北极的强度,可以作为一个外部基准,来降低陀螺仪漂移误差对偏航角计算的影响,并且九轴陀螺仪技术成熟,可以利用内部集成的加速度计、陀螺仪、磁力计等可以直接计算出各姿态数据,无需在主控单元内增加任何算法或程序。相相比于使用多个独立传感器汇总的方式采用九轴陀螺仪易于集成,可以减少主控板上通讯、电源线路走线,不需要占用主控单元上的通讯口数量。九轴陀螺仪内部集成算法,直接输出计算好的姿态角,可以节约控制模块的计算资源。因陀螺仪长时间工作会导致漂移误差,当清扫机器人
完成清扫工作回到停车位置时,停止陀螺仪工作,对陀螺仪进行归零矫正,提高检测准确性。
156.光伏清扫机器人的姿态控制装置的工作过程:感应装置610进行采集实时输出包括偏航角、横滚角和俯仰角pitch在内的姿态数据。确定模块620在同一个参考标准,当接收清扫机器人运动时的三维姿态参数,则可以根据三维姿态参数确定清扫机器人当前的偏转状态。其中,偏转状态可以反映清扫机器人偏离航向、高低起伏和脱离光伏板表面的程度。当清扫机器人存在异常的偏转状态时,控制模块630可以通过调整清扫机器人的驱动模块640的驱动转速,使清扫机器人姿态恢复。例如,当清扫机器人发生航向偏转,结合清扫机器人行驶方向可以调整一侧的行走轮加速或减速,使清扫机器人恢复到正常姿态。确定模块620和控制模块630可以集成在同一个中央控制单元660中,可以使控制装置的硬件结构更加紧凑。
157.本发明实施例提供的技术方案,通过感应装置获取清扫机器人运动时的三维姿态参数和行驶航向,在同一个参考标准下,获取清扫机器人运动时的三维姿态参数,则可以根据三维姿态参数确定清扫机器人当前的偏转状态,结合清扫机器人行走方向,调节清扫机器人的姿态,利用三维姿态参数分析清扫机器人的偏转状态,仅通过一个感应装置即可检测三维姿态数据,降低清扫机器人的集成复杂度,提高了清扫机器人的姿态检测精度,从而根据清扫机器人的姿态及时干预调节,进而提高了清扫机器人运行的安全性。
158.继续参见图16,姿态控制装置还包括停机报警模块650;确定模块还包括判断单元;
159.判断单元,用于判断三维姿态参数是否在参数范围内;
160.若三维姿态参数未在参数范围内,控制模块630还用于获取三维姿态参数未在参数范围内的持续时间;
161.在持续时间大于预设时间时,停机报警模块650用于将驱动模块停机。
162.具体的,控制模块记录三维姿态参数未在参数范围内的持续时间t,判断持续时间t是否超过预设时间t1,若持续时间t超过预设时间t1,则说明清扫机器人长时间处于姿态异常状态,通过简单调整不能使清扫机器人恢复,需要通过停机报警模块650将清扫机器人进行停机,同时可以进一步的发出故障报警,提示工程人员进行检修排查。其中,感应装置610通过i2c或spi协议与中央控制单元660通讯,中央控制单元660通过can协议控制驱动模块640,中央控制单元660通过modbus协议与停机报警模块650通讯。
163.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。