1.本发明属于自动控制技术领域,具体涉及一种跟随音乐摇摆的半球形底座控制系统,本发明还涉及一种跟随音乐摇摆的半球形底座控制系统的控制方法。
背景技术:
[0002]“不倒翁小姐姐”不倒的秘密就藏在她们的底盘上。这些底盘是一种质量很大的实心半球体,即使小姐姐们在上面舞动,它的重心野一直在半球体内,不论半球体如何滚动,始终用一个接触点站立在地面上。
[0003]
现今市面上的不倒翁玩偶都是通过外力给予惯性来实现摇摆,不能很好的进行控制,且玩偶动作僵硬死板。
技术实现要素:
[0004]
本发明的目的是提供一种跟随音乐摇摆的半球形底座控制系统,该系统使用无刷电机带动动量轮的结构,通过动量轮的转动控制底座的平衡,使不倒翁玩偶更加可控。
[0005]
本发明的另一目的是提供一种跟随音乐摇摆的半球形底座控制系统的控制方法。
[0006]
本发明所采用的第一技术方案是,跟随音乐摇摆的半球形底座控制系统,包括半球形底座,半球形底座内部设置有主控制电路板,主控制电路板内置有主控单元,主控单元分别与姿态检测单元、电机驱动单元、语音识别单元、音频播放单元、无线通信单元以及稳压单元连接,主控制电路板还通过编码器与无刷电机连接,编码器安装于无刷电机的尾部,无刷电机顶端安装有动量轮,无刷电机固定于电机支架上,电源支架内部安装有电源,连接到主控制电路板以及无刷电机。
[0007]
本发明第一技术方案的特点还在于,
[0008]
无刷电机共两组,每组为两个无刷电机,安装于壳体切面的两条互相垂直的直径的端点,无刷电机型号为nidec的无刷伺服电机,工作电压12v。
[0009]
动量轮共两组,每组为两个,对应安装于无刷电机转轴顶端,动量轮的直径为30mm-60mm。
[0010]
半球形底座内部底部还安装有若干块有动平衡配重块,动平衡配重块材料为铁质。
[0011]
主控制电路板固定于主控制电路板支架上,主控制电路板支架位于所述半球形底座从上至下1/3位置处。
[0012]
电源支架位于所述半球形底座的底部,并且位于电路板支架下面,电源支架自身高度为整个壳体的2/3,电源支架内部安装锂电池。
[0013]
稳压单元有两部分,包括5v转3.3v稳压单元a和12v转5v稳压单元电路b,所述5v转3.3v稳压单元a输入端连接12v转5v稳压电路b 的输出端,5v转3.3v稳压单元a输出与所述主控制器连接,5v转3.3v稳压单元a的具体电路结构为:包括u3单元,u3单元为rt9013-33芯片, u3单元的1、3引脚与 5v电源连接, 5v电源与地之间还连接有电容c10, u3单元的2引
脚接地,u3单元的1引脚与 5v电源之间还连接电容c11的一端,电容c11的另一端接地,u3单元的5引脚与 3.3电源连接, 3.3电源与地之间连接由电容c13,u3单元的5引脚与 3.3电源之间还连接有电容c12的一端,电容c12的另一端接地;
[0014]
12v转5v稳压单元b输入端与所述锂电池连接,输出端分别连接5v 转3.3v稳压单元a、姿态检测单元、电机驱动单元、语音识别单元、音频播放单元以及无线通信单元,具体电路为:包括u4单元,u4单元为lm2596 芯片,u4单元的1引脚与 12v电源连接,u4单元的5引脚接地,u4单元的1引脚和5引脚之间连接有电容c16、c17,u4单元的3引脚、6引脚接地,u4单元的4引脚通过r8连接到 5v电源,u4单元的2引脚通过l3 连接到 5v电源,u4单元的4引脚、2引脚与3引脚、6引脚之间连接有二极管d3、电容c18、电容c19。
[0015]
主控制电路板包含姿态检测单元、电机驱动单元、语音识别单元、音频播放单元、无线通信单元以及稳压单元,姿态检测单元与主控制器连接;电机驱动单元输入端连接到主控制器,输出端连接至无刷电机;语音识别单元输入端为蓝牙,输出端连接到主控制器;音频播放单元输入端连接到主控制器,输出端连接到扬声器。
[0016]
本发明所采用的第二技术方案是,跟随音乐摇摆的半球形底座控制系统的控制方法,具体按照以下步骤实施:
[0017]
步骤1、首先打开电源,用户通过语音识别模块或者无线通信单元输入期望角度,同时输入期望播放的音乐;
[0018]
步骤2、对即将播放的音乐进行切片,根据期望摇摆的角度计算出底座转动一周期所需要的时间,设期望摇摆角度为n度,转动一周期需要时间为 m秒,在对音乐切片时,以一句完整的歌词结尾为分割,且时间为m秒,以此获得一首歌曲的切片,同时得到每个切片歌词的播放时间;根据播放时间对系统的转动速度进行调整,使得系统在摇摆到最大角度时,刚好到达该片歌词的结尾,达到跟随音乐规律性摇摆的目的;
[0019]
步骤3、根据动量公式经过pid计算得到期望的无刷电机转速,在pid 控制内环利用编码器获得到电机的实际转速,反馈到期望转速,迭代计算 pwm的占空比,在外环利用陀螺仪单元检测半球形底座的倾斜角度,再反馈到迭代阶段,根据实际角度与期望角度的差值经pid计算后获取到下一次期望的电机转速,由此,不断地迭代计算,最终底座倾斜到指定角度。
[0020]
本发明的有益效果是,跟随音乐摇摆的半球形底座控制系统,利用动量轮控制整个系统的运动,使得整个系统在任意方向上倾斜
±
80
°
内可控。本发明采用闭环控制,利用姿态检测单元采集底座的倾斜角度,根据期望的角度与实际角度的差值利用pid算法计算出对应的pwm波,从而控制电机的转速,达到控制动量轮的转动速度,使得整个底座达到摇晃的效果,且整个底座处于稳定状态。本发明初始时通过用户利用无线通信单元或者语音识别单元设置摇摆角度开始工作。首先控制转动位于同一直径端点的两个电机,使得底座在前后位置上摇晃,并逐渐达到期望角度,之后转动另一条直径端点的两个电机,使得整个系统在期望角度上做逆或者顺时针摇动。
附图说明
[0021]
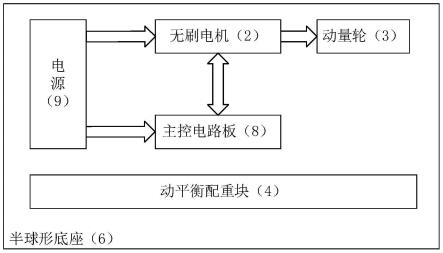
图1是本发明的系统结构框图;
[0022]
图2是本发明的结构俯视图;
[0023]
图3是本发明的结构剖面图;
[0024]
图4是本发明的主控制电路板结构框图;
[0025]
图5是本发明中主控制器电路图;
[0026]
图6(a)是本发明中5v转3.3v稳压单元电路图;
[0027]
图6(b)是本发明中12v转5v稳压单元电路图;
[0028]
图7是本发明中所使用动量轮;
[0029]
图8是本发明中闭环控制结构图;
[0030]
图9是本发明中流程控制图。
[0031]
图3中,1.主控制电路板支架,2.无刷电机,3.动量轮,4.动平衡配重块,5.电源支架,6.半球形底座,7.电机支架,8.主控制电路板,9.锂电池。
具体实施方式
[0032]
下面结合附图和具体实施方式对本发明进行详细说明。
[0033]
本发明跟随音乐摇摆的半球形底座控制系统,结构如图1所示,包括半球形底座6,半球形底座6内部设置有主控制电路板8,主控制电路板8内置有主控单元,主控单元分别与姿态检测单元、电机驱动单元、语音识别单元、音频播放单元、无线通信单元以及稳压单元连接,主控制电路板8还通过编码器与无刷电机2连接,编码器安装于无刷电机2的尾部,动量轮如图 7所示,无刷电机2顶端安装有动量轮3,无刷电机2固定于电机支架7上,电源支架5内部安装有电源9,连接到主控制电路板8以及无刷电机2。
[0034]
无刷电机2共两组,每组为两个无刷电机,安装于壳体切面的两条互相垂直的直径的端点,无刷电机型号为nidec的无刷伺服电机,工作电压12v。
[0035]
动量轮3共两组,每组为两个,对应安装于无刷电机2转轴顶端,动量轮3的直径为30mm-60mm。
[0036]
半球形底座6内部底部还安装有若干块有动平衡配重块4,动平衡配重块4材料为铁质,重量为1g、5g或者10g,使得整个系统在初始状态下保持平衡。
[0037]
主控制电路板8固定于主控制电路板支架1上,主控制电路板支架1位于所述半球形底座6从上至下1/3位置处。
[0038]
电源支架5位于所述半球形底座6的底部,并且位于电路板支架1下面,电源支架5自身高度为整个壳体的2/3,电源支架5内部安装锂电池9。
[0039]
稳压单元有两部分,包括5v转3.3v稳压单元a和12v转5v稳压单元电路b,所述5v转3.3v稳压单元a输入端连接12v转5v稳压电路b 的输出端,5v转3.3v稳压单元a输出与所述主控制器连接,为主控制器提供稳定的电压,如图6(a)所示,5v转3.3v稳压单元a的具体电路结构为:包括u3单元,u3单元为rt9013-33芯片,u3单元的1、3引脚与 5v 电源连接, 5v电源与地之间还连接有电容c10,u3单元的2引脚接地, u3单元的1引脚与 5v电源之间还连接电容c11的一端,电容c11的另一端接地,u3单元的5引脚与 3.3电源连接, 3.3电源与地之间连接由电容 c13,u3单元的5引脚与 3.3电源之间还连接有电容c12的一端,电容c12 的另一端接地;
[0040]
如图6(b)所示,12v转5v稳压单元b输入端与所述锂电池9连接,输出端分别连接5v转3.3v稳压单元a、姿态检测单元、电机驱动单元、语音识别单元、音频播放单元以及无线通
信单元,具体电路为:包括u4单元, u4单元为lm2596芯片,u4单元的1引脚与 12v电源连接,u4单元的5 引脚接地,u4单元的1引脚和5引脚之间连接有电容c16、c17,u4单元的3引脚、6引脚接地,u4单元的4引脚通过r8连接到 5v电源,u4单元的2引脚通过l3连接到 5v电源,u4单元的4引脚、2引脚与3引脚、 6引脚之间连接有二极管d3、电容c18、电容c19。
[0041]
主控制电路板包含姿态检测单元、电机驱动单元、语音识别单元、音频播放单元、无线通信单元以及稳压单元,姿态检测单元与主控制器连接;电机驱动单元输入端连接到主控制器,输出端连接至无刷电机;语音识别单元输入端为蓝牙,输出端连接到主控制器;音频播放单元输入端连接到主控制器,输出端连接到扬声器。
[0042]
跟随音乐摇摆的半球形底座控制系统的控制方法,具体按照以下步骤实施:
[0043]
步骤1、首先打开电源,用户通过语音识别模块或者无线通信单元输入期望角度,同时输入期望播放的音乐;
[0044]
步骤2、对即将播放的音乐进行切片,根据期望摇摆的角度计算出底座转动一周期所需要的时间,设期望摇摆角度为n度,转动一周期需要时间为 m秒,在对音乐切片时,以一句完整的歌词结尾为分割,且时间为m秒,以此获得一首歌曲的切片,同时得到每个切片歌词的播放时间;根据播放时间对系统的转动速度进行调整,使得系统在摇摆到最大角度时,刚好到达该片歌词的结尾,达到跟随音乐规律性摇摆的目的;
[0045]
步骤3、根据动量公式经过pid计算得到期望的无刷电机2转速,在pid 控制内环利用编码器获得到电机的实际转速,反馈到期望转速,迭代计算 pwm的占空比,在外环利用陀螺仪单元检测半球形底座6的倾斜角度,再反馈到迭代阶段,根据实际角度与期望角度的差值经pid计算后获取到下一次期望的电机转速,由此,不断地迭代计算,最终底座倾斜到指定角度。为了能够使得所述底座更加符合“不倒翁”摇摆,在达到期望角度运动过程中,将期望角度分为多个阶段。初始阶段期望所述底座在前后方向倾斜在
±
0.5
°
之间,首先将所述底座倾斜达到0.5
°
,之后再将所述底座倾斜达到-0.5
°
,使得所述底座在前后方向上方向摇摆,之后每个阶段递增
±1°
,使得所述底座在摇摆过程中逐渐达到期望角度。左右方向上摇摆同理可得。最终,在动量轮的带动下,整个系统可像“不倒翁”一样摇摆晃动。
[0046]
本发明中,如图1所示,为本发明整个系统的系统结构图,主控电路板支架1用于安装主控板,位于所述底座从上至下1/3处。电机支架用于安装电机,位于所述底座的侧面。电源支架用于安装电源,位于所述底座的底部,高度为整个壳体的2/3,如图2、图3所示。电源连接到主控制电路板、电机。主控制板连接到编码器及电机,编码器安装于电机尾部,电机顶端安装动量轮。主控板内置有姿态检测单元、电机驱动单元、语音识别单元、音频播放单元、无线通信单元以及稳压单元。
[0047]
动平衡配重块材料为铁质,包含1g、5g、10g。安装于底座的底端及其他位置,使得系统保持平衡。
[0048]
电源为额定电压12v的锂电池。
[0049]
半球形底座、电路板安装支架及电池支架采用3d打印技术制作,如图 2、图3所示为本发明的俯视图及剖面图。
[0050]
主控制电路板用于控制整个系统工作,所述无刷电机用于控制动量轮转动速度,动量轮用于控制整个底座的倾斜方向及倾斜角度,动平衡配重块用于保持整个系统在初始状态下,在各个方向上倾斜角度趋于0
°
,电源用于给整个系统提供稳定的电压及电流。
[0051]
主控单元用于控制整个系统;所述稳压单元用于提供稳定的电压供给电机及整个电路板;所述无线通信单元用于接收用户的命令;所述姿态检测单元用于检测底座的倾斜角度;所述电机驱动单元用于输出pwm波控制电机;所述音频播放单元用于播放具有特色的歌曲,配合底座规律性摇晃;所述语音识别单元用于实现人机交互。
[0052]
如图4所示为主控制电路板结构框图,所述主控单元中主控器为 mm32f3277,其电路图如图5所示。mm32f3270g7p基于armcortex-m3 内核,适用于要求高集成度的高性能控制领域,在性能和外设集成度配置方面具有显著的特点。所述电机驱动单元为4组4通道接口,一个通道包含的连接线分别为pwm信号线、方向线、输出信号线a、输出信号线b,pwm 信号线控制电机的转速,方向线控制电机的转动方向,输出信号线a、b为编码器输出的实际电机转速,电机驱动单元一端连接到主控制器,另一端连接到电机以及编码器,编码器安装于电机尾部,用于测量电机的转速。四组分别控制四个电机。
[0053]
姿态检测单元采用芯片为icm20602,其是一个6轴运动跟踪芯片,结合了3轴陀螺仪,3轴加速度计。陀螺仪灵敏度误差:
±
1%,陀螺仪噪声: 4mdps/hz,加速度计噪声:100μg/hz,采用spi通信。所述稳压单元如图6 所示,其中12v转5v电路采用lm2596芯片,5v转3.3v采用rt9013-33 芯片。
[0054]
无线通信单元为蓝牙,利用串口与主控制器通信,用户可通过手机蓝牙连接系统蓝牙,进行通信。所述音频播放单元采用芯片为jr6001,通过串口与主控制器通信,主控制器将音频文件通过串口发送到该芯片,该芯片即可输出信号到扬声器播放音乐。
[0055]
语音识别单元为ld3320语音识别模块,该芯片上集成了高精度的a/d 和d/a接口,不需要外接辅助flash和ram,即可以实现语音识别/声控/ 人机对话功能。并且识别的关键词语列表是可以动态编辑的,采用spi与主控制器通信,当系统上电后,即开始进行语音识别,用户可通过“小翁小翁”语音唤醒系统,通过“开始旋转”、“停止旋转”语音命令控制系统开始工作或者停止工作,或者通过“旋转60
°”
控制系统转动的最大角度。
[0056]
无刷电机自带编码器,支持pwm调速,带电子刹车,12v电压驱动,支持正反转。该电机pwm输入频率在2000-10000hz。经过测试,获得到不同的占空比对应的转速,如表1所示。
[0057]
表1不同占空比对应转速
[0058]
[0059]
为了实现所述系统跟随音乐规律性摇摆,本发明首先对即将播放的音乐进行切片,根据期望摇摆的角度计算出底座转动一周期所需要的时间,以期望摇摆角度为60
°
为例,转动一周期需要时间约为4s。在对音乐切片时,以一句完整的歌词结尾为分割,且时间在4s左右,以此获得到一首歌曲的切片,且获得到每片歌词的播放时间,根据播放时间对系统的转动速度进行调整,使得系统在摇摆到最大角度时,刚好到达该片歌词的结尾,达到跟随音乐规律性摇摆的目的。
[0060]
所述系统闭环控制结构如图8所示,首先输入期望角度,根据动量公式经过pid计算得到期望的电机转速,再利用pid计算对应的pwm波占空比,输出到无刷电机的编码器控制电机转动,从而带动动量轮旋转,使得整个底座向正方向转动,在内环利用编码器获得到电机的实际转速,反馈到期望转速,迭代计算pwm的占空比,在外环利用陀螺仪单元检测底座的倾斜角度,再反馈到迭代阶段,根据实际角度与期望角度的差值经pid计算后获取到下一次期望的电机转速,由此,不断地迭代计算,最终底座倾斜到指定角度。
[0061]
系统的整体软件设计流程图如图9所示。首先对系统进行初始化,同时开启定时器a以及定时器b。在主函数中判断是否接收到用户指令,如果接收到则根据指令执行对应的功能。在定时器a中断处理函数中,利用卡尔曼滤波算法融合计算出陀螺仪的角速度及欧拉角,由此,获取到所述底座的实际倾斜角度,根据期望角度以及实际角度计算出期望的电机转速。在定时器 b中断处理函数中,根据定时器a中断处理函数中计算出的期望转速以及编码器返回的电机实际转速计算出pwm占空比。为了能够使得所述底座更加符合“不倒翁”摇摆,在达到期望角度运动过程中,将期望角度分为多个阶段。初始阶段期望所述底座在前后方向倾斜在
±
0.5
°
之间,首先将所述底座倾斜达到0.5
°
,之后再将所述底座倾斜达到-0.5
°
,使得所述底座在前后方向上方向摇摆,之后每个阶段递增
±1°
,使得所述底座在摇摆过程中逐渐达到期望角度。左右方向上摇摆同理可得。最终,在动量轮的带动下,整个系统可像“不倒翁”一样摇摆晃动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。