1.本技术飞行器制导技术领域,具体涉及一种基于修正比例导引的自适应制导方法、装置及飞行器。
背景技术:
2.某飞行器地面发射时,其发射点和目标点基本在同一高度,修正比例导引根据射程进行变参时,可满足不同射程的落角及精度要求。随着技术的发展,发射方式由地面导轨发射改为空中机载发射,由于空中机载发射高度跨度较大,根据射程进行变参的修正比例导引制导方法不能满足不同发射高度(发射点和目标点的相对高度)及射程的落角约束及打击精度要求,需要采用新的制导方式来解决不同发射高度及射程对落角约束及打击精度的要求。
技术实现要素:
3.鉴于上述问题,本技术提供一种基于修正比例导引的自适应制导方法,该制导方法采用了一种修正比例导引的落角约束项和重力补偿项根据发射高度及射程变参的自适应制导方法,解决了不同发射高度及不同射程的落角约束及打击精度问题。
4.本技术实施例还提供了一种自适应制导装置。
5.本技术实施例还提供了一种飞行器。
6.根据本技术第一方面实施例提供的一种基于修正比例导引的自适应制导方法,该方法应用于修正比例导引,包括:在修正比例导引中引入落角约束项和重力补偿项,获取发射时刻飞行器的射程和发射高度,计算所述发射高度和射程对应的落角约束项系数和重力补偿项系数,将所述落角约束项系数和重力补偿项系数带入所述修正比例导引,得到制导指令。
7.在其中一个实施例中,在修正比例导引中引入落角约束项和重力补偿项后的修正比例导引公式为:
[0008][0009]
其中:v为飞行器飞行速度;k1为比例导引系数,取值为4;dq_ep为俯仰视线角速度;klj为落角约束项系数;q_ep为视线高低角;θ
df
为期望落角;kg为重力补偿项系数;θg为弹道倾角;g为重力加速度。
[0010]
在其中一个实施例中,所述落角约束项系数采用二维线性插值求得。
[0011]
在其中一个实施例中,根据落角和精度要求,通过仿真得到满足不同发射高度和射程的落角约束项系数插值表,通过所述插值表采用二维线性插值求得发射时刻飞行器的射程和发射高度所对应的落角约束项系数。
[0012]
在其中一个实施例中,所述重力补偿项系数采用二维线性插值求得。
[0013]
在其中一个实施例中,根据落角和精度要求,通过仿真得到满足不同发射高度和射程的重力补偿项系数插值表,通过所述插值表采用二维线性插值求得发射时刻飞行器的射程和发射高度所对应的重力补偿项系数。
[0014]
在其中一个实施例中,所述插值表包括行刻度dlth_inter、列刻度r0_inter,所述行刻度dlth_inter表示发射高度插值点,所述列刻度r0_inter表示射程插值点。
[0015]
根据本技术第二方面实施例提供的一种自适应制导装置,包括:
[0016]
处理器;
[0017]
存储介质,其上存储有计算机程序,所述计算机程序被所述处理器运行时执行如权利要求1至7任一项所述的方法。
[0018]
根据本技术第三方面实施例提供的一种飞行器,包括:
[0019]
制导部分,其包括上述自适应制导装置,所述自适应制导装置用于计算制导指令;
[0020]
控制部分,用于接收所述制导指令,并根据所述制导指令控制飞行器的运动姿态,导引飞行器向目标飞行。
[0021]
本技术一实施例提供的基于修正比例导引的自适应制导方法,至少包括以下有益效果:通过在修正比例导引的落角约束项和重力补偿项中引入落角约束项系数和重力补偿项系数,根据发射高度及射程变参,调节落角约束项系数和重力补偿项系数可满足不同发射高度和射程对落角约束和打击精度的要求。
[0022]
上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
附图说明
[0023]
本技术中附图是用于示出优选实施方式,便于本领域普通技术人员对各种其他的优点和益处清楚明了的认识,并不能认为是对本技术的限制。而且在全部附图中,用相同的附图标号表示相同的部件。
[0024]
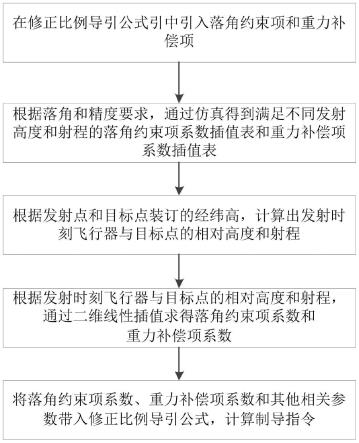
图1为本技术一实施例中基于修正比例导引的自适应制导方法的流程图。
[0025]
图2为本技术一实施例中飞行器与目标的关系示意图。
[0026]
图3为本技术一实施例中进行数学仿真验证时射程与高度关系曲线图。
[0027]
图4为本技术一实施例中进行数学仿真验证时飞行时间与飞行速度关系曲线图。
[0028]
图5为本技术一实施例中进行数学仿真验证时飞行时间与弹目相对距离关系曲线图。
[0029]
图6为本技术一实施例中进行蒙特卡洛打靶验证时20km蒙特卡洛打靶试验静目标仿真cep结果图。
[0030]
图7为本技术一实施例中进行蒙特卡洛打靶验证时15km蒙特卡洛打靶试验静目标仿真cep结果图。
[0031]
图8为本技术一实施例中进行蒙特卡洛打靶验证时8km蒙特卡洛打靶试验静目标仿真cep结果图。
具体实施方式
[0032]
下面将结合具体实施例对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0033]
在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
[0034]
一般飞行器在地面发射时,其发射点和目标点基本在同一高度,修正比例导引根据射程进行变参时,可满足不同射程的落角及精度要求。随着技术的发展,发射方式由地面发射改为空中机载发射,由于空中机载发射高度跨度较大,根据射程进行变参的修正比例导引制导方法不能满足不同发射高度(指发射点和目标点的相对高度)及射程的落角约束及打击精度要求,需要采用新的制导方式来解决不同发射高度及射程对落角约束及打击精度的要求。
[0035]
在一方面实施例中,图1示出了本技术实施例提供的一种基于修正比例导引的自适应制导方法的流程图。
[0036]
参见图1,本技术实施例提供的基于修正比例导引的自适应制导方法,包括:
[0037]
一、在修正比例导引中引入落角约束项和重力补偿项后的修正比例导引公式为:
[0038][0039]
图2示出了飞行器与目标的关系。
[0040]
参见图2,上述修正比例导引公式中:
[0041]
v为飞行器飞行速度;
[0042]
k1为比例导引系数;
[0043]
dq_ep为俯仰视线角速度;
[0044]
klj为落角约束项系数;
[0045]
q_ep为视线高低角;
[0046]
θ
df
为期望落角;
[0047]
kg为重力补偿项系数;
[0048]
θg为弹道倾角;
[0049]
g为重力加速度。
[0050]
二、根据落角和精度要求,通过仿真得到满足不同发射高度和射程的落角约束项系数插值表klj_data及重力补偿项系数插值表kg_data,如下表所示:
[0051]
落角约束项系数插值表klj_data
[0052][0053]
重力补偿项系数插值表kg_data
[0054][0055][0056]
表中:r0_inter为射程插值点、dlth_inter为发射高度插值点。
[0057]
三、根据发射点和目标点装订的经纬高,计算出发射时刻飞行器与目标点的相对水平距离r0(即射程),以及发射点高度与目标点高度的差的绝对值dlth(即发射高度);
[0058]
四、采用二维线性插值计算落角约束项系数和重力补偿项系数。
[0059]
发射时刻飞行器与目标点的射程r0,以及发射点与目标点的发射高度dlth。
[0060]
计算落角约束项系数:
[0061]
落角约束项系数klj=interp2(dlth_inter,r0_inter,klj_data,dlth,r0),表示参数klj采用二维线性插值求得。
[0062]
插值时,klj_data为数据表,dlth_inter为插值行刻度,r0_inter为列刻度,dlth为行插值参数(即发射高度),r0为列插值参数(即射程)。
[0063]
计算重力补偿项系数:
[0064]
重力补偿项系数kg=interp2(dlth_inter,r0_inter,kg_data,dlth,r0),表示参数kg采用二维线性插值求得。其中,dlth为行插值参数,r0为列插值参数。
[0065]
插值时,klj_data为数据表,dlth_inter为插值行刻度,r0_inter为列刻度,dlth为行插值参数(即发射高度),r0为列插值参数(即射程)。
[0066]
五、将落角约束项系数klj和重力补偿项系数kg代入到公式(1)中,根据导引头及导航系统输出的其他相关参数信息,得到需要的制导指令n
yc
。
[0067]
可以理解的是,导引头及组合导航系统输出的其他相关参数信息包括:飞行器飞行速度v、俯仰视线角速度dq_ep、视线高低角q_ep、期望落角θ
df
、弹道倾角θg。
[0068]
在一实施例中,比例导引系数k1取值为4,π取3.1415926。
[0069]
在另一方面实施例中,本技术提供了一种自适应制导装置,包括:
[0070]
该自适应制导装置可以包括处理器,以及用于存储所述处理器的可执行指令的存储器。其中,所述处理器配置为经由执行所述可执行指令来执行上述任意一个实施例中所述基于修正比例导引的自适应制导方法的步骤。
[0071]
在另一方面实施例中,本技术提供了一种飞行器,包括制导部分和控制部分。
[0072]
具体地,制导部分导引头和导航系统等,导航系统包括上述任意一个实施例中所述的自适应制导装置,自适应制导装置用于计算制导指令。
[0073]
具体地,控制部分,包括舵机、机载计算机等,用于接收所述制导指令,并根据所述制导指令控制飞行器的运动姿态,导引飞行器向目标飞行。
[0074]
可以理解的是,制导指令n
yc
与导引头和导航系统实时输出的飞行器过载形成负反馈,经过比例积分送给飞行器控制部分,通过驱动控制部分改变飞行器的运动姿态,导引飞行器向目标飞行,进而实现不同射程、不同高度的打击精度要求。
[0075]
数学仿真验证:
[0076]
选取两组某典型导弹进行验证:
[0077]
a型导弹发射海拔高度9000m、发射速度280km/h、目标点海拔高度1000m,射程分别为20km、15km、10km、5km;
[0078]
b型导弹发射海拔高度4000m、发射速度280km/h、目标点海拔高度1000m,射程分别为10km、5km、3km;
[0079]
经仿真验证,指标参数如下表所示:
[0080]
指标参数表
[0081][0082][0083]
需要说明的是,a1、a2、a3、a4分别为a型导弹在射程20km、15km、10km、5km时的弹道;a5、a6、a7分别为b型导弹在射程10km、5km、3km时的弹道。
[0084]
通过数学仿真验证,参见图3、4、5中射程与高度关系曲线、飞行时间与飞行速度关系曲线、飞行时间与弹目相对距离关系曲线,结合指标参数表,说明通过数学仿真验证,此算法可以满足飞行器进行不同高度、不同射程的的打击要求,且飞行轨迹平稳。因此采用本技术实施例所述的基于修正比例导引的自适应制导方法的导弹的指标均满足总体要求。
[0085]
蒙特卡洛打靶验证:
[0086]
以某导弹为例,采用典型射程20km、15km、8km和典型发射高度7000m,根据各种随机扰动因素对不同射程分别进行100次蒙特卡洛模拟打靶。
[0087]
蒙特卡洛打靶试验仿真cep结果如图6、7、8所示,图中dltx为弹目相对纵向距离,单位为米;dltz为弹目相对侧向距离,单位为米。
[0088]
需要说明的是,弹目相对纵向距离是指导弹与目标的纵向距离,弹目相对侧向距离是指导弹与目标的侧向距离。
[0089]
通过蒙特卡洛打靶验证,参见图6、7、8(图中的“相高”是相对高度的简写,指的是发射点高度与目标点高度的差的绝对值dlth,也就是发射高度),可以看出采用本技术实施例所述的基于修正比例导引的自适应制导方法进行不同射程打击时,cep均在0.2m以内,远小于指标cep不大于1m的要求,因此采用此方法导弹均能满足打击目标的精度要求。
[0090]
综上所述,本技术实施例中通过调节落角约束项系数和重力补偿项系数可满足不同发射高度和射程对落角约束和打击精度的要求,特别是适用于不同发射高度发射的飞行器。并且已经过半实物仿真试验及飞行试验验证,指标均满足要求,工程使用性较强。
[0091]
最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制。尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围,其均应涵盖在本技术的权利要求和说明书的范围当中。尤其是,只要不存在矛盾冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本技术并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。