1.本发明涉及电梯控制技术领域,特别涉及一种基于自抗扰控制的永磁同步曳引机控制系统。
背景技术:
2.自抗扰控制提供了一个思路,就是在系统模型因为建模做线性等效和降阶处理时,同实际系统相比不准确的情况下,可以将因为不准确导致的误差等效到外部扰动中,共同构成不确定部分,通过设计线性扩张状态观测器 (leso-linear extended state observer)来实现对于不确定部分地观测和误差的快速收敛。
3.比例-积分-微分(pid)控制由n.minorsky在1922年提出(directionalstability and automatically steered bodies),在工业控制90%以上的领域得到了充分的应用,其参数的整定在工业实践中更多依赖的是经验法则,较为常用的是两位泰勒仪器公司的工程师ziegler和nichols在1942年提出的工程整定表格(optimal settings for automatic controllers)。战后技术的发展使得pid控制法从经验法逐步向解析法开始迈进,以h.bode和 h.nyquist为主的频率分析法和稳定性判据在实际应用中对于控制系统的设计起到了关键作用。以上所述的可以称为是基于模型控制(model-basedcontrol),要求控制工程师对于被控系统的模型要足够的准确性认知。但由于实际调试中理想的系统模型同实际系统有偏差,再考虑到外部扰动的影响,如测量带来的白噪声(gaussian white noises)和传动扰动(gearingdisturbances)等。常规的控制方法对于这些不确定性的统筹控制能力有限,更多的是基于实际现场经验的针对性调节(ad hoc)。
4.gao.h在文献(scaling and bandwidth-parameterization basedcontroller tuning)中指出:这样缺乏设计视野的控制导致在工业领域实施时调节参数成为一种启发式的操作,更进一步说,控制设计和调参更倾向于一种艺术方向而非科学。在永磁同步曳引机系统控制领域,由于永磁同步曳引机是非线性和强耦合系统,在运行过程中其一些电气特性,如电感和电阻是时变的,而常规的控制方法认为电气特性是不变的,这样就会带来系统的偏差,更不用说系统降阶等效,还有外扰带来的偏差,所以,需要能够找到一种方法,可以更好的观测到这些不确定性,并且,能够控制这些不确定性,在抗扰和收敛时间上都要能够满足实际的需求。
技术实现要素:
5.本发明所要解决的技术问题在于针对永磁同步曳引机系统控制所存在的不足而提供一种基于自抗扰控制的永磁同步曳引机控制系统,其将自抗扰控制模型应用到永磁同步曳引机系统中,可以更为有效地控制因为曳引机系统模型低阶等效而产生的同实际系统的不确定性,通过设计系统的带宽和观测器极点,实现系统对于不确定部分地观测和快速收敛。
6.为了实现上述发明目的,本发明的一种基于自抗扰控制的永磁同步曳引机控制系
统,包括:速度调节器和电流调节器以及永磁同步曳引机系统,速度指令信号和从永磁同步曳引机系统测量到的速度反馈信号,从所述速度调节器的输入端输入,所述速度调节器输出的转矩电流指令信号和所述从永磁同步曳引机系统测量到的输出转矩电流信号一起送入电流调节器中,所述电流调节器输出的输出电压电流信号送入永磁同步曳引机系统中,达到控制永磁同步曳引机系统的目的。
7.在本发明的一个优选实施例中,所述速度调节器和电流调节器均采用自抗扰模型进行设计。
8.在本发明的一个优选实施例中,所述电流调节器采用如下步骤设计而成:
9.步骤1)设计电流调节器的带宽ω
cb
;
10.步骤2)根据实际系统的响应性和属性来设计阻尼系数ζc;
11.步骤3)根据步骤1)的带宽ω
cb
和步骤2)的阻尼系数ζc构建电流调节器的线性误差反馈控制器(lsef),所述电流调节器的线性误差反馈控制器的控制律为:
12.u
co
=k
cp
(i
r-z
c1
)-k
cdzc2
,其中,k
cp
=ω
cb2
,k
cd
=2ζcω
cb
,,z
c1
为线性扩张状态观测器(leso)观测到的转矩电流信号,z
c2
为线性扩张状态观测器(leso)观测到的转矩电流信号的变化率,即转矩电流信号的一阶导数;
13.步骤4:设计线性扩张状态观测器的极点ω
co
,依据gao.h在文献(scalingandbandwidth-parameterizationbasedcontrollertuning)中所述带宽配置法,线性扩张状态观测器矩阵lc中的成员值分别为:β
c1
=3ω
co
,β
c2
=3ω
co2
,β
c3
=ω
co
3;
14.步骤5:设定电流调节器初始的控制增益估计值其中,是永磁同步曳引机定子等效电阻的估计值,为时间延迟的估计值,为永磁同步曳引机定子电气时间常数的估计值。
15.在本发明的一个优选实施例中,所述速度调节器采用如下步骤设计而成:
16.步骤1)设计速度调节器的带宽ω
sb
;
17.步骤2)根据实际系统的响应性和属性来设计阻尼系数ζs;
18.步骤3)根据步骤1)的带宽ω
sb
和步骤2)的阻尼系数ζs构建速度调节器的线性误差反馈控制器(lesf),所述速度调节器的线性误差反馈控制器的控制律为:
19.i
so
=k
sp
(r-z
s1
)-k
sdzs2
,其中,k
sp
=ω
sb2
,k
sd
=2ζsω
sb
,,r为速度指令信号,z
s1
为线性扩张状态观测器(leso)观测到的速度,z
s2
为线性扩张状态观测器(leso)观测到的速度变化率,即加速度;
20.步骤4:设计线性扩张状态观测器的极点ω
so
,依据带宽配置法,线性扩张状态观测器矩阵ls中的成员值分别为:β
s1
=3ω
so
,β
s2
=3ω
so2
,β
s3
=ω
so3
;
21.步骤5:设定速度调节器初始的控制增益估计值其中,gs为线性扩张状态观测器观测得的机械角速度转化为电气频率的系数,一般为
22.ω为永磁同步曳引机系统测得的机械角速度p为永磁同步曳引机极对数,是转矩/电流转换系数的估计值,为时间延迟的估计值,为系统直线系和回转系
等效到永磁同步曳引机转轴侧的转动惯量的估计值。
23.在本发明的一个优选实施例中,所述电流调节器的带宽大于所述速度调节器的带宽10倍;所述电流调节器的执行频率大于所述速度调节器的执行频率10倍。
24.由于采用了如上的技术方案,本发明在永磁同步曳引机控制系统的设计上实现对于控制模型的独立性,即对于控制模型的不准确有了很强的独立控制性和纠偏能力,同时,将控制模型同实际系统的误差连同外扰特性合成为一个整体的不确定环节进行控制,通过构建观测器实现对于不确定性环节的观测和误差纠正。整个控制模型等效成了一个双积分器,通过设计控制器的控制律可以将速度调节器和电流调节器的闭环传递函数分别设计成一个标准的二阶系统。同时通过带宽的设计又能确定控制器的控制参数和观测器的观测参数,这样整个系统就转化成仅需要通过对带宽的设计就可实现回路的整形和误差的估计,从而实现对永磁同步曳引机系统的控制。
附图说明
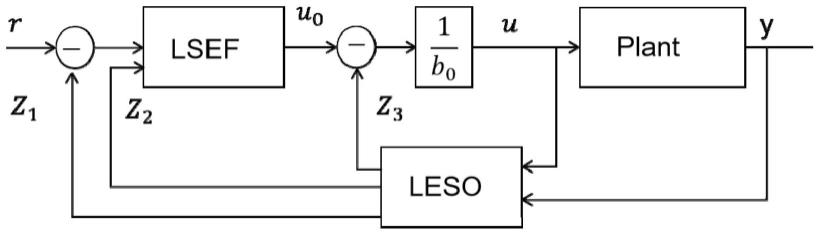
25.图1为本发明二阶自抗扰模型示意图。
26.图2为本发明将图1中的lesf右边系统等效为双积分器模型示意图。
27.图3为本发明基于自抗扰控制的永磁同步曳引机控制系统模型示意图。
28.图4为本发明电流调节器(acr)闭环控制的频域系统框图。
29.图5为本发明等效的电流调节器(acr)闭环控制的频域系统框图。
30.图6为本发明电流调节器自抗扰控制系统模型示意图。
31.图7为本发明将图6中的lesf右边系统等效为双积分器模型示意图。
32.图8为本发明速度调节器(asr)闭环控制的频域系统框图。
33.图9为本发明等效的速度调节器(acr)闭环控制的频域系统框图。
34.图10为本发明速度调节器自抗扰控制系统模型示意图。
35.图11为本发明将图10中的lesf右边系统等效为双积分器模型示意图。
36.图12为本发明电流调节器设计流程示意图。
37.图13为本发明速度调节器设计流程示意图。
具体实施方式
38.以下结合附图和具体实施方式来进一步描述本发明。
39.本发明提供的一种基于自抗扰控制的永磁同步曳引机控制系统,将自抗扰控制模型应用到永磁同步曳引机系统中,可以更为有效地控制因为曳引机系统模型低阶近似等效而产生的同实际系统的不准确性,通过设计系统的带宽和观测器极点,实现系统对于不确定部分地观测和快速收敛。
40.本发明提供的一种基于自抗扰控制的永磁同步曳引机控制系统,应用于电流调节器(acr-automatic current regulator)和速度调节器(asr
ꢀ‑
automatic speed regulator)双环路控制。
41.下面结合图1和图2,对速度调节器和电流调节器所采用的自抗扰模型进行描述:
42.图1中,r是参考的输入信号,lsef是线性状态误差反馈控制器,leso为线性扩展状态观测器,plant为系统,其状态方程表示为
[0043][0044]
其中b为控制增益,是系统的固有属性,f1是和系统输出y、系统的外扰ω和时间t相关的函数,设b0为控制增益的估计量,则上式可以写成
[0045][0046]
令等效总扰动为
[0047]
f(y,ω,t)=(b-b0)u f1(y,ω,t)
[0048]
则
[0049][0050]
选取状态变量
[0051]
x1=y
[0052][0053]
x2=f
[0054][0055]
则写成状态空间方程为
[0056][0057]
y=cx
[0058]
其中,
[0059]
c=[1 0 0]
[0060]
设计leco为,
[0061][0062][0063]
其中,
[0064]
z1=y
[0065][0066]
z3=f
[0067]
l=[β
1 β
2 β3]
t
[0068]
l为观测器矩阵,β1,β2和β3为观测器增益
[0069]
因为
[0070]
u=(u
0-z3)/b0[0071]
则
[0072][0073]
当z3→
f时,从而将lesf右边系统等效成了一个双积分器。
[0074]
对于观测器l,采用极点配置法(pole-placement)
[0075]
将系统状态空间方程同leco相减,得到
[0076][0077]
令x-z=e,则
[0078]
要使得e收敛,需要保证eig(a-lc)<0,则
[0079]
|λi-(a-lc)|=λ3 β1λ2 β2λ β3[0080]
令|λi-(a-lc)|=(λ ωo)3,得到观测器增益值
[0081]
β1=3ωo,
[0082]
下面针对具体的永磁同步曳引机系统模型控制进行说明。
[0083]
参见图3,本发明的基于自抗扰控制的永磁同步曳引机控制系统由速度调节器asr和电流调节器acr以及电梯控制器plant,内环路为电流调节器acr,外环路为速度调节器asr。速度指令信号r和永磁同步曳引机控制系统测量到的速度反馈信号f从速度调节器asr的输入端输入,速度调节器asr输出的转矩电流指令信号i和从永磁同步曳引机系统测量到输出转矩电流信号i
t
一起送入电流调节器acr中,电流调节器acr输出的输出电压电流信号u送入永磁同步曳引机控制系统中,永磁同步曳引机控制系统输出测量的速度反馈信号f和测量的转矩电流信号i
t
。
[0084]
电流调节器的设计原理如下:
[0085]
参见图4,图4所示的电流调节器(acr)闭环控制的频域系统框图中,ir是转矩电流指令信号,controller为电流控制器,u为输出电压控制信号,r1为永磁同步曳引机定子等效电阻,l为永磁同步曳引机等效电感,i
t
为输出转矩电流,在输入测和反馈侧各有一低通滤波器环节,用来平衡存在于前向通路和反馈通路的时间延迟,一般而言,该时间延迟远小于电机的电气时间常数
[0086]
将图4所述的两个低通滤波器合成为一个,形成图5所示为等效的电流调节器(acr)闭环控制的频域系统框图
[0087]
依据图5设计电流调节器(acr)自抗扰控制器,将系统模型由频域转化为时域常微分方程(ode),用来计算出自抗扰控制模型中的控制增益bc,
[0088][0089]
所以,
[0090]
得到,
[0091][0092]
因此,
[0093]
[0094]
通过对系统建模,计算一个初始的控制增益估计值其中,是永磁同步曳引机定子等效电阻的估计值,为时间延迟的估计值,为永磁同步曳引机定子电气时间常数的估计值。
[0095]
建立电流调节器自抗扰控制系统,如图6所示,其中,线性状态误差反馈控制器(lesf)需要确定电流调节器的设计带宽ω
cb
,控制率为u
c0
=k
cp
(i
r-z
c1
)-k
cdzc2
,这样设计控制律的原因是为了构建标准二阶闭环传递函数,由于如上文所述,lsef右半侧部分可等效为一个双积分器,如图7所示,因此系统的闭环传递函数可写为
[0096][0097]
参照标准的二阶系统
[0098][0099]
得到
[0100]kcd
=2ζcω
cb
[0101][0102]
其中,ζc为阻尼系数,需要依据实际系统的响应性和属性来设计阻尼系数。线性扩展状态观测器(leso)设计为:
[0103][0104][0105]
其中,
[0106]
lc=[β
c1
β
c2
β
c3
]
t
[0107]
β
c1
,β
c2
,β
c3
是观测器增益,
[0108]
依据文献scalingandbandwidth-parameterizationbasedcontrollertuning)的极点配置法,选择三个相同的观测器极点ω
co
,保证其复平面位于左半平面,可得到β
c1
=3ω
co
,
[0109]
电流调节器设计步骤
[0110]
综上所述,参见图12电流调节器设计步骤如下
[0111]
1.设计电流调节器的带宽ω
cb
;
[0112]
2.根据实际系统的响应性和属性来设计阻尼系数ζc;
[0113]
3.根据步骤1和布置2所述构建线性状态误差反馈控制器(lesf),其控制律为u
c0
=k
cp
(i
r-z
c1
)-k
cdzc2
,其中,k
cd
=2ξcω
cb
;
[0114]
4.设计线性扩张状态观测器(leso)的极点ω
co
,依据文献(scalingandbandwidth-parameterizationbasedcontrollertuning)所述带宽配置法,观测器矩阵lc中的成员值分别为
[0115]
β
c1
=3ω
co
,
[0116]
5.电流调节器初始的控制增益估计值
[0117]
速度调节器设计原理
[0118]
图8所述的是速度调节器(asr)闭环控制的频域系统框图,其中r是速度指令信号,一般为电气频率。controller为速度控制器,i为输出转矩控制信号,k
t
为转矩/电流转换系数,即电流调节器,由于电流调节器的带宽和执行频率一般大于速度调节器带宽和执行频率10倍,所以在速度调节器中,针对一个速度调节周期,认为处于处于内环的电流调节器早已完成调节,当作一个常数增益环节k
t
处理。j是系统转动惯量,在实际系统中为直线系和回转系等效到永磁同步曳引机转轴侧的转动惯量,这里将曳引系统近似为一个刚性系统处理。ω为永磁同步曳引机系统测得的机械角速度, gs为永磁同步曳引机系统测得的机械角速度转化为电气频率的系数,一般为其中,p为永磁同步曳引机极对数。在反馈侧有一低通滤波器环节,用来平衡存在于反馈通路的时间延迟如速度传感器精度和滤波带来的延迟,相比于电流调节器中存在同前向通路和反馈通路的时间延迟,速度调节器因为执行频率低,这种线路上的延迟时间要远小于传感器因精度不足和滤波带来的延迟,近似可以忽略。
[0119]
如图9所示为等效的速度调节器(asr)闭环控制的频域系统框图,依据图9 设计自抗扰控制器,将系统模型由频域转化为时域常微分方程(ode),用来计算出自抗扰控制模型中的控制增益bs,
[0120][0121]
所以,
[0122][0123]
得到,
[0124][0125]
因此,
[0126][0127]
通过对系统建模,计算一个初始的控制增益估计值其中,是转矩/电流转换系数的估计值,为时间延迟的估计值,为系统直线系和回转系等效到永磁同步曳引机转轴侧的转动惯量的估计值。
[0128]
建立速度调节器自抗扰控制系统,如图10所示,其中,线性状态误差反馈控制器
(lesf)需要确定速度调节器的设计带宽ω
sb
,控制率为i
s0
=k
sp
(i
r-z
s1
)-k
sdzs2
,这样设计控制律的原因是为了构建标准二阶闭环传递函数,由于如上文所述,lsef右半侧部分可等效为一个双积分器,如图11所示,因此系统的闭环传递函数可写为
[0129][0130]
参照标准的二阶系统
[0131][0132]
得到
[0133]ksd
=2
ζs
ω
sb
[0134][0135]
其中,ζs为阻尼系数,需要依据实际系统的响应性和属性来设计阻尼系数线性扩展状态观测器(leso)设计为:
[0136][0137][0138]
其中,
[0139]
ls=[β
s1
β
s2
β
s3
]
t
[0140]
β
s1
,β
s2
,β
s3
是观测器增益,
[0141]
依据文献(scalingandbandwidth-paremeterizationbasedcontrollertuning)的极点配置法,选择三个相同的观测器极点ω
so
,保证其复平面位于左半平面,可得到β
s1
=3ω
so
,
[0142]
速度调节器设计步骤
[0143]
综上所述,参见图13,速度调节器设计步骤如下
[0144]
1.设计速度调节器的带宽ω
sb
;
[0145]
2.根据实际系统的响应性和属性来设计阻尼系数ζs;
[0146]
3.根据步骤1和步骤2所述构建线性状态误差反馈控制器(lesf),其控制律为i
s0
=k
sp
(r-z
s1
)-k
sdzs2
,其中,k
sd
=2ζsω
sb
;
[0147]
4.设计线性扩张状态观测器(leso)的极点ω
so
,依据文献(scalingandbandwidth-paremeterizationbasedcontrollertuning)所述带宽配置法,观测矩阵中ls的成员值分别为:β
s1
=3ω
so
,
[0148]
5.速度调节器初始的控制增益估计值
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
