1.本实用新型涉及一种电磁制动器检测设备,尤其涉及一种一站式多功能检测设备。
背景技术:
2.电磁制动器是一种将主动侧扭力传达给被动侧的连接器,可以根据需要自由结合,实现切离或制动,具有结构紧凑、操作简单、响应灵敏、寿命长久、使用可靠、易于实现远距离控制等优点,其具体形式可分为电磁粉末制动器、电磁涡流制动器、电磁摩擦式制动器等多种形式;另外根据摩擦片差异还细分为干式单片电磁制动器、干式多片电磁制动器、湿式多片电磁制动器等,根据制动方式差异又可分为通电制动和断电制动,根据加压方式可分为弹簧加压、磁性加压等。
3.随着社会的进步,智能控制、精准控制需求越来越多,对电磁制动器的性能要求、质量保证性也越来越高,所以电磁制动器在出厂前需要进行各项性能参数检测,不合格产品需要再加工或作废处理,合格产品才能流入市场。比如,弹簧加压干式电磁制动器需要进行初始磨合、制动力矩检测、快速降温/回转背隙检测、残余扭矩检测、吸合/脱离动作时间检测、吸合/脱离电压检测等各项检测。
4.电磁制动器的传统检测设备都是单一性能的检测,人结合仪器进行手动检测,不同人分工测试不同检测项目,投入人力多,仪器多,检测效率低,检测结果可靠性受人为影响因素大,对人员技能要求比较高,所以难以适应现代工业高效率、高可靠性的发展要求,特别是在批量生产的情况下,快速、高效、可靠地完成电磁制动器的各项性能检测,已经成为比较迫切的需求。
技术实现要素:
5.本实用新型的目的就在于为了解决上述问题而提供一种快速、高效、可靠地完成电磁制动器各项性能检测的一站式多功能检测设备。
6.本实用新型通过以下技术方案来实现上述目的:
7.一种一站式多功能检测设备,包括机架、驱动电机、凸轮分割器、转盘、自动夹具和控制器,所述驱动电机和所述凸轮分割器分别安装于所述机架上,所述驱动电机的转轴与所述凸轮分割器的旋转动力输入端连接,所述凸轮分割器的旋转动力输出端与横向的所述转盘的下部中心位置连接,所述转盘的上面沿圆周方向设有多个操作工位,每个所述操作工位上设有一个用于夹持电磁制动器的所述自动夹具,所述驱动电机的控制输入端和所述自动夹具的控制输入端分别与所述控制器的控制输出端连接。上述凸轮分割器在工程上又称为凸轮分度器或间歇分割器,是一种现有技术中的高精度回转装置,能够实现精确的旋转角度控制,根据转盘上操作工位的数量形成多工位凸轮分割器,比如本实用新型优选采用的六工位凸轮分割器;上述自动夹具和自动升降机构采用能够自动控制的常规器件,具体结构根据实际需要而定,在此不作具体说明;上述控制器采用具有监控功能的常规控制
器,比如可编程逻辑控制器plc等。
8.作为优选,为了更加准确地检测转盘所在位置,所述一站式多功能检测设备还包括一个或多个位置传感器,所述位置传感器安装于所述机架上并位于所述转盘的下方且用于检测所述转盘的位置,所述位置传感器的信号输出端与所述控制器的位置信号输入端连接。
9.作为优选,为了便于工作人员控制操作,所述一站式多功能检测设备还包括控制操作台,所述控制操作台上设有控制按钮和触摸屏,所述控制按钮的信号输出端与所述控制器的控制信号输入端连接,所述触摸屏的信号输入输出端与所述控制器的信号端对应连接。
10.作为优选,为了通过二维码扫描确定待检测产品的真实性,所述一站式多功能检测设备还包括安装于所述机架上并靠近用于上下料的操作工位的二维码扫描仪,所述二维码扫描仪的信号输出端与所述控制器的扫描信号输入端连接。
11.作为优选,为了便于集中管理电子元件,所述一站式多功能检测设备还包括安装于所述机架上的工控机,所述控制器置于所述工控机内。
12.作为优选,为了便于实现更多计算、管理等功能和/或远程监控,所述一站式多功能检测设备还包括控制柜,所述控制器与所述控制柜内的通信电路之间有线或无线通信连接。
13.作为优选,为了实现报警功能和显示功能,所述控制柜上安装有蜂鸣器和显示屏。
14.作为优选,为了实现更好的打磨功能且不影响多个电磁制动器的其它同步检测,所述一站式多功能检测设备还包括自动升降机构,所述自动升降机构安装于所述机架上并位于对应的所述操作工位的上方,所述自动升降机构包括用于对所述电磁制动器进行打磨处理的初始磨合升降机构,所述初始磨合升降机构包括打磨基座、打磨升降电机、打磨电机座、打磨电机、打磨头、防尘罩、吹气管、吸尘管和打磨到位传感器,所述打磨基座安装在所述机架上并位于对应的所述操作工位的上方,所述打磨升降电机安装在所述打磨基座上,所述打磨电机座安装在所述打磨基座上并与所述打磨升降电机的转轴连接且能够在所述打磨升降电机的驱动下上下移动,所述打磨电机安装在所述打磨电机座上,所述打磨头与所述打磨电机的转轴连接并位于所述打磨电机的下方,所述防尘罩安装在所述打磨电机的下部且所述打磨头置于所述防尘罩内,所述吹气管和所述吸尘管分别与所述防尘罩相通连接,所述吹气管的与高压气源连接,所述吸尘管与吸尘器连接,所述打磨到位传感器安装在所述防尘罩上并用于检测所述电磁制动器是否到达打磨位置,所述打磨到位传感器的信号输出端与所述控制器的打磨到位信号输入端连接,所述打磨升降电机的控制输入端和所述打磨电机的控制输入端分别与所述控制器的控制输出端对应连接。
15.作为优选,为了实现更好的扭矩检测功能且不影响多个电磁制动器的其它同步检测,所述自动升降机构还包括用于对所述电磁制动器进行扭矩检测的扭矩检测升降机构,所述扭矩检测升降机构包括扭矩检测基座、扭矩检测升降电机、扭矩检测电机座、扭矩检测电机、扭矩检测仪、扭矩检测连接件和扭矩检测到位传感器,所述扭矩检测基座安装在所述机架上并位于对应的所述操作工位的上方,所述扭矩检测升降电机安装在所述扭矩检测基座上,所述扭矩检测电机座安装在所述扭矩检测基座上并与所述扭矩检测升降电机的转轴连接且能够在所述扭矩检测升降电机的驱动下上下移动,所述扭矩检测电机安装在所述扭
矩检测电机座上,所述扭矩检测仪与所述扭矩检测电机的转轴连接并位于所述扭矩检测电机的下方,所述扭矩检测连接件安装于所述扭矩检测电机座上且其上端与所述扭矩检测仪的下端连接,所述扭矩检测连接件的下端用于与所述电磁制动器连接,所述扭矩检测到位传感器安装于所述扭矩检测电机座上并位于靠近所述扭矩检测连接件下端的位置且用于检测所述电磁制动器是否到达扭矩检测位置,所述扭矩检测到位传感器的信号输出端与所述控制器的扭矩检测到位信号输入端连接,所述扭矩检测升降电机的控制输入端和所述扭矩检测电机的控制输入端分别与所述控制器的控制输出端对应连接。
16.上述自动升降机构的数量根据检测项目而定,有些检测项目不需要升降机构,则不用在对应工位的上方安装升降机构,需要则安装。
17.本实用新型的有益效果在于:
18.本实用新型通过设计由驱动电机控制旋转的转盘,在转盘上设计多个操作工位和自动夹具,可以实现电磁制动器的各项参数的连续检测,也可以实现多个电磁制动器的同步检测,利用一套设备和少量工作人员即可实现快速、高效、可靠的检测目的,适应了现代工业高效率、高可靠性的发展要求;在将各种检测结果进行计算、分析、判断的基础上,本设备能够集成更多电子信息管理功能,为电磁制动器批量生产的高度智能化管理打下坚实基础。
附图说明
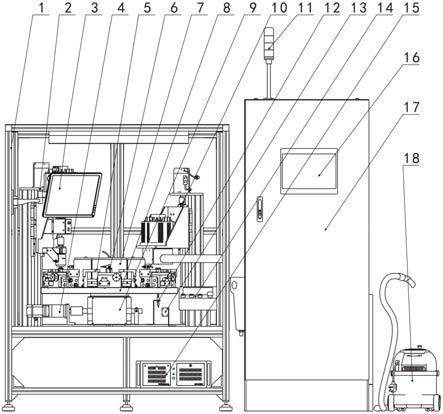
19.图1是本实用新型所述一站式多功能检测设备的主视图;
20.图2是本实用新型所述一站式多功能检测设备的驱动电机、凸轮分割器、转盘和自动夹具的主视图,比例大于图1;
21.图3是本实用新型所述一站式多功能检测设备的转盘和自动夹具的俯视图,图中还示出了电磁制动器;
22.图4是本实用新型所述一站式多功能检测设备的初始磨合升降机构的主视图,比例大于图1;
23.图5是本实用新型所述一站式多功能检测设备的扭矩检测升降机构的主视图,比例大于图1。
具体实施方式
24.下面结合附图对本实用新型作进一步说明:
25.如图1-图3所示,本实用新型所述一站式多功能检测设备包括机架1、驱动电机4、凸轮分割器9、转盘8、自动夹具5和控制器(图中未示),驱动电机4 和凸轮分割器9分别安装于机架1上,驱动电机4的转轴与凸轮分割器9的旋转动力输入端连接,凸轮分割器9的旋转动力输出端与横向的转盘8的下部中心位置连接,转盘8的上面沿圆周方向设有多个操作工位,每个所述操作工位上设有一个用于夹持电磁制动器6的自动夹具5,驱动电机4的控制输入端和自动夹具5的控制输入端分别与所述控制器的控制输出端连接。
26.如图1-图5所示,本实用新型还公开以下多种更加优化的具体结构,根据实际需要可以将下述一种或多种具体结构与上述结构进行叠加组合形成更加优化的技术方案。
27.为了更加准确地检测转盘8所在位置,所述一站式多功能检测设备还包括一个或
多个位置传感器12,位置传感器12安装于机架1上并位于转盘8的下方且用于检测转盘8的位置,位置传感器12的信号输出端与所述控制器的位置信号输入端连接。
28.为了便于工作人员控制操作,所述一站式多功能检测设备还包括控制操作台14,控制操作台14上设有控制按钮(图中未标记)和触摸屏(图中未标记),所述控制按钮的信号输出端与所述控制器的控制信号输入端连接,所述触摸屏的信号输入输出端与所述控制器的信号端对应连接。
29.为了通过二维码扫描确定待检测产品的唯一编号并便于后续跟踪记录相关检测信息,所述一站式多功能检测设备还包括安装于机架1上并靠近用于上下料的操作工位的二维码扫描仪13,二维码扫描仪13的信号输出端与所述控制器的扫描信号输入端连接。
30.为了便于集中管理电子元件,所述一站式多功能检测设备还包括安装于所述机架上的工控机15,所述控制器置于工控机15内。
31.为了便于实现更多计算、管理等功能和/或远程监控,所述一站式多功能检测设备还包括控制柜17,所述控制器与控制柜17内的通信电路(图中未示)之间有线或无线通信连接。
32.为了实现报警功能和显示功能,控制柜17上安装有蜂鸣器11和显示屏16。
33.为了便于实现更好的自动控制功能,自动夹具5包括夹持气缸(图中未标记),所述夹持气缸的控制输入端为所述自动夹具的控制输入端;所述自动升降机构包括升降电机,所述升降电机的控制输入端为所述自动升降机构的控制输入端。
34.为了实现更好的打磨功能且不影响多个电磁制动器6的其它同步检测,所述一站式多功能检测设备还包括自动升降机构,所述自动升降机构安装于所述机架上并位于对应的所述操作工位的上方,所述自动升降机构包括用于对电磁制动器6进行打磨处理的初始磨合升降机构10,初始磨合升降机构10包括打磨基座107、打磨升降电机100、打磨电机座102、打磨电机103、打磨头(图中未示)、防尘罩104、吹气管105、吸尘管(图中未示)和打磨到位传感器106,打磨基座107安装在机架1上并位于对应的所述操作工位的上方,打磨升降电机100安装在打磨基座107上,打磨电机座102安装在打磨基座107上并与打磨升降电机100的转轴连接且能够在打磨升降电机100的驱动下上下移动,打磨电机103安装在打磨电机座102上,所述打磨头与打磨电机103的转轴连接并位于打磨电机103的下方,防尘罩104安装在打磨电机103的下部且所述打磨头置于防尘罩104内,吹气管105和所述吸尘管分别与防尘罩104相通连接,吹气管105的与高压气源(图中未示)连接,所述吸尘管与吸尘器18连接,打磨到位传感器106安装在防尘罩104上并用于检测电磁制动器6是否到达打磨位置,打磨到位传感器106的信号输出端与所述控制器的打磨到位信号输入端连接,打磨升降电机100的控制输入端和打磨电机103的控制输入端分别与所述控制器的控制输出端对应连接。
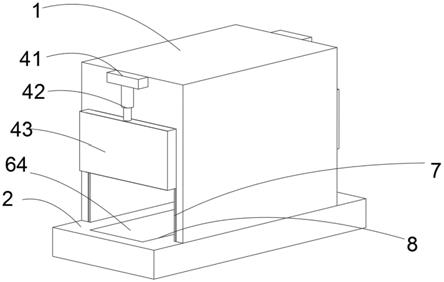
35.为了实现更好的扭矩检测功能且不影响多个电磁制动器6的其它同步检测,所述自动升降机构还包括用于对电磁制动器6进行扭矩检测的扭矩检测升降机构2,扭矩检测升降机构2包括扭矩检测基座25、扭矩检测升降电机20、扭矩检测电机座23、扭矩检测电机21、扭矩检测仪24、扭矩检测连接件26和扭矩检测到位传感器27,扭矩检测基座25安装在机架1上并位于对应的所述操作工位的上方,扭矩检测升降电机20安装在扭矩检测基座25上,扭矩检测电机座 23安装在扭矩检测基座25上并与扭矩检测升降电机20的转轴连接且能够在扭矩检测升降电机20的驱动下上下移动,扭矩检测电机21安装在扭矩检测电机座23上,扭
矩检测仪24与扭矩检测电机21的转轴连接并位于扭矩检测电机21 的下方,扭矩检测连接件26安装于扭矩检测电机座23上且其上端与扭矩检测仪24的下端即其用于与被检测件连接的连接端连接,扭矩检测连接件26的下端用于与电磁制动器6连接,扭矩检测到位传感器27安装于扭矩检测电机座23 上并位于靠近扭矩检测连接件26下端的位置且用于检测电磁制动器6是否到达扭矩检测位置,扭矩检测到位传感器27的信号输出端与所述控制器的扭矩检测到位信号输入端连接,扭矩检测升降电机20的控制输入端和扭矩检测电机21 的控制输入端分别与所述控制器的控制输出端对应连接。
36.图1还示出了设于扭矩检测基座25上的检测显示屏3,图1-图3还示出了设于转盘9的中心位置的中心柱7,该中心柱7与机架1连接并穿过转盘9的中心通孔,该中心柱7内设有内腔并安装相关电子元件,图4还示出了用于实现打磨电机座102上下限位移动的打磨导轨机构101,图5还示出了用于实现扭矩检测电机座23上下限位移动的扭矩检测导轨机构22,这些结构均为适应性常规结构。
37.如图1-图5所示,使用时,操作者先用二维码扫描仪13扫描待检测的电磁制动器6的二维码,然后将电磁制动器6放在上下料的工位上,通过自动夹具5 夹持定位,夹持定位过程中,可以先通过自动控制的定位电机带动电磁制动器6 旋转,在确定找正后再夹持定位,然后转动转盘8使其进入下一工位,并在上下料工位安装下一个待检测的电磁制动器6。如果没有扫描即将电磁制动器6放在上下料工位上,则对应的自动夹具5不会执行夹持动作,以防止影响后期检测项目的跟踪记录。
38.在上下料工位完成夹持定位的电磁制动器6,在转盘8的旋转驱动下,依次经过其它工位,在各工位上完成制动器打磨、冷却、扭矩检测、背隙检测、残余扭矩检测、电压阈值检测、吸合/脱离动作时间检测、吸合/脱离电压检测等相关检测,各检测设备采集到相关检测数据后传输给控制器,一方面供控制器作为控制各被控制设备的参考依据,另一方面作为后期计算和存储的基础数据,为电磁制动器的智能化生产提供数据支持。完成所有检测的电磁制动器6在上下料工位被工作人员取下,完成检测和卸料。
39.另外,上述上下料过程中,也可以采用机械手实现自动装夹上料和卸料。从而实现更全面的自动化作业。
40.上述实施例只是本实用新型的较佳实施例,并不是对本实用新型技术方案的限制,只要是不经过创造性劳动即可在上述实施例的基础上实现的技术方案,均应视为落入本实用新型专利的权利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。