1.本实用新型涉及自动化机器人技术领域,具体地,涉及一种六蚹节式多功能垂直作业装置。
背景技术:
2.传统的高空外墙作业往往以人力完成,在安全措施的保护下,工作人员的安全往往能够得到较好的保障,但由于高空外墙风力风向等不确定性因素,多有惨案发生,安全措施稍显有限。因此,研究一种可以替代人力进行高空作业的机器人,将具有很重要的现实意义。
3.现有的地面机器人,在动态越障、步态规划、姿态控制等方面已经有了较为完善的发展,适用于一些人类不便到达的极端危险恶劣环境。而现有的爬墙机器人相比于地面机器人而言实现,其功能还较为单一,同时对于高层幕墙清洁、墙面粉刷等领域还并未广泛运用,一种多功能载重爬墙的机器人的出现以替代人类完成危险作业是一种必然趋势。
4.目前没有发现同本发明类似技术的说明或报道,也尚未收集到国内外类似的资料。
技术实现要素:
5.本实用新型针对现有技术中存在的上述不足,提供了一种六蚹节式多功能垂直作业装置。
6.本实用新型提供的六蚹节式多功能垂直作业装置,包括:核心控制组件、与所述核心控制组件连接的六个电机输出轴连接器以及与每一个所述电机输出轴连接器连接的机械足;其中:
7.所述核心控制组件包括上顶盖、下底板以及包覆于所述上顶盖和所述下底板之间的电气部件;
8.所述上顶盖包括八边形盖板,所述八边形盖板的延轴线对称的六条侧边上分别设有一个第一电机输出接口,用于安装所述电机输出轴连接器;每一个所述第一电机输出接口的周围均设有多个第一连接口;所述八边形盖板的轴线上设有三个载重接口,分别位于所述八边形盖板的顶边、底边和中心处;
9.所述下底板包括八边形底板,所述八边形底板上设有与所述八边形盖板上第一电机输出接口和第一连接口相对应的第二电机输出接口和第二连接口;所述八边形底板的轴线上还设有从上至下依次设置的第一腔室、第二腔室和第三腔室;所述第二腔室设有总线通孔和支路通孔;
10.所述电气部件包括:主控板、电源件和气动件;其中,所述主控板设置于所述第二腔室内,并通过电源接口与所述电源件连接以及通过总线与所述气动件控制连接;所述电源件设置于所述第一腔室内,所述气动件设置于所述第三腔室内,并分别通过电源线和气管与所述机械足驱动连接;所述总线穿过所述总线通孔,所述电源线和所述气管穿过所述
支路通孔。
11.可选地,所述第一连接口为4个。
12.可选地,所述总线为5v,gnd,i2c总线。
13.可选地,位于所述八边形盖板中心处的载重接口为六边形的稳定接口;位于所述八边形盖板顶边和底边上的载重接口分别为一个开有螺纹孔的矩形接口。
14.可选地,所述第一腔室和所述第三腔室为形状相同且对称的矩形结构;所述第二腔室为八角形。
15.可选地,所述第二腔室内设有多个大小相同并呈矩形排列的主板连接口。
16.可选地,所述主板连接口为4个。
17.可选地,每一个所述电机输出轴连接器均包括:两个相互连接的u型转接片以及安装于每一个所述u型转接片自由端上的d型电机轴连接法兰;其中:
18.两个所述u型转接片之间的连接梁相互垂直设置,其中每一个所述u型转接片的连接梁中央位置均设有一个圆形通孔,所述圆形通孔的圆周上设有多个第一螺纹连接口;
19.每一个所述u型转接片自由端上均设有与所述d型电机轴连接法兰位置相对应的多个第二螺纹连接口;
20.所述d型电机轴连接法兰的安装面上设有n个螺纹孔,其中n-1个所述螺纹孔等圆角分布,最后一个所述螺纹孔位于其中非对角线相邻的两个所述螺纹孔之间的中心位置。
21.可选地,所述第一螺纹连接口和所述第二螺纹连接口分别为8个。
22.可选地,所述n取值为5。
23.可选地,每一个所述机械足均包括依次连接的:机械股骨节、机械髌骨节、机械胫骨节、机械腕骨节和机械端蚹节,所述机械股骨节还与所述电机输出轴连接器连接;
24.所述机械股骨节包括两侧护板以及设置于所述两侧护板之间的两个电机,两个所述电机的电机轴连接口和分别与所述机械髌骨节和所述电机输出轴连接器连接,并固定在所述第一连接口上;所述机械端蚹节的自由端端部设有气动吸盘;所述主控板通过总线与所述电机驱动连接;所述气动件与所述气动吸盘驱动连接,控制所述气动吸盘的吸附状态;
25.所述电机驱动所述机械股骨节进而带动所述电机输出轴连接器和所述机械髌骨节完成前后移动,并通过所述机械胫骨节与所述机械腕骨节的配合运动完成收缩和外放,形成横向移动;
26.所述机械腕骨节保证所述机械端蚹节上的气动吸盘能够与作业面平行并吸附其上。
27.本实用新型提供的六蚹节式多功能垂直作业装置,是一种能够安全完成外立面机械作业的载重平台,采用了以六蚹节式机器人为基础的平台设计,对核心控制模块位姿具有的良好控制,可以保障核心控制模块以及工具在较大的倾斜角度上进行作业,同时,六蚹节式可以更好地完成越障工作,克服了现有技术中外立面机械装置极度依赖墙面机械固定以及极度需要墙面平整光滑的问题,使得外立面机械装置可以更为灵活、机动地在各类不同外立面上完成各类作业项目,保证了各类外墙施工作业机械化,智能化的可行性。
28.本实用新型提供的六蚹节式多功能垂直作业装置,是一种能够适配各类外立面作业环境的爬壁机械平台,尤其适用于高层幕墙清洁、墙面粉刷等自动化作业需求。
附图说明
29.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
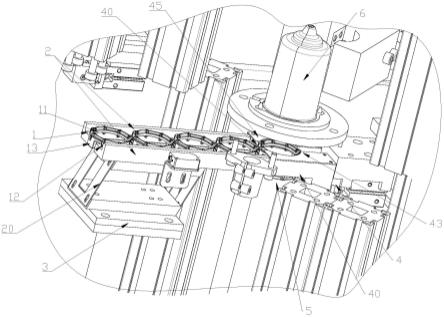
30.图1为本实用新型一实施例中六蚹节式多功能垂直作业装置的总体结构示意图。
31.图2为本实用新型一优选实施例中六蚹节式多功能垂直作业装置的上顶盖结构示意图。
32.图3为本实用新型一优选实施例中六蚹节式多功能垂直作业装置的下底板结构示意图。
33.图4为本实用新型一优选实施例中六蚹节式多功能垂直作业装置的电机输出轴连接器的装配图以及零件结构示意图。
具体实施方式
34.下面对本实用新型的实施例作详细说明:本实施例在以本实用新型技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
35.图1为本发明一实施例提供的六蚹节式多功能垂直作业装置的总体结构示意图。
36.如图1所示,该实施例提供的六蚹节式多功能垂直作业装置,可以包括如下部件:核心控制组件、与核心控制组件连接的六个电机输出轴连接器3以及与每一个电机输出轴连接器连接的机械足4;其中:
37.核心控制组件包括上顶盖1、下底板2以及包覆于上顶盖1和下底板2之间的电气部件;
38.上顶盖1包括八边形盖板,八边形盖板的延轴线对称的六条侧边上分别设有一个第一电机输出接口,用于安装电机输出轴连接器3;每一个第一电机输出接口的周围均设有多个第一连接口;八边形盖板的轴线上设有三个载重接口,分别位于八边形盖板的顶边、底边和中心处;
39.下底板2包括八边形底板,八边形底板上设有与八边形盖板上第一电机输出接口和第一连接口相对应的第二电机输出接口和第二连接口;八边形底板的轴线上还设有从上至下依次设置的第一腔室27、第二腔室28和第三腔室29;第二腔室设有总线通孔和支路通孔;
40.电气部件包括:主控板、电源件和气动件;其中,主控板设置于第二腔室28内,并通过电源接口与电源件连接以及通过总线与气动件控制连接;电源件设置于第一腔室27内,气动件设置于第三腔室29内,并分别通过电源线和气管与机械足4驱动连接;总线通孔用于穿过总线,支路通孔用于穿过电源线和气管。。
41.在一具体应用实例中,第一连接口为4个。
42.在一具体应用实例中,总线为5v,gnd,i2c总线。
43.在一优选实施例中,位于八边形盖板中心处的载重接口为六边形的稳定接口;位于八边形盖板顶边和底边上的载重接口分别为一个开有螺纹孔的矩形接口。
44.在一优选实施例中,第一腔室27和第三腔室29为形状相同且对称的矩形结构;第
二腔室28为八角形。
45.在一优选实施例中,第二腔室28内设有多个大小相同并呈矩形排列的主板连接口284。
46.在一具体应用实例中,主板连接口284为4个。
47.在一优选实施例中,每一个电机输出轴连接器3均包括:两个相互连接的u型转接片31以及安装于每一个u型转接片31自由端上的d型电机轴连接法兰32;其中:
48.两个u型转接片31之间的连接梁相互垂直设置,其中每一个u型转接片31的连接梁中央位置均设有一个圆形通孔311,圆形通孔311的圆周上设有多个第一螺纹连接口313;
49.每一个u型转接片31自由端上均设有与d型电机轴连接法兰32位置相对应的多个第二螺纹连接口312;
50.d型电机轴连接法兰32的安装面上设有n个螺纹孔321,其中n-1个螺纹孔等圆角分布,最后一个螺纹孔位于其中非对角线相邻的两个螺纹孔之间的中心位置。
51.在一具体应用实例中,第一螺纹连接口313和第二螺纹连接口312分别为8个。
52.在一具体应用实例中,n取值为5。
53.在一优选实施例中,每一个机械足均包括依次连接的:机械股骨节41、机械髌骨节42、机械胫骨节43、机械腕骨节44和机械端蚹节45,机械股骨节41还与电机输出轴连接器3连接;
54.机械股骨节41包括两侧护板414以及设置于两侧护板414之间的两个电机,两个电机的电机轴连接口412和413分别与机械髌骨节42和电机输出轴连接器3连接,并固定在第一连接口上;机械端蚹节45的自由端端部设有气动吸盘;主控板通过总线与电机驱动连接;气动件与气动吸盘驱动连接,控制气动吸盘的吸附状态;
55.电机驱动机械股骨节41进而带动电机输出轴连接器3和机械髌骨节42完成前后移动,并通过机械胫骨节43与机械腕骨节44的配合运动完成收缩和外放,形成横向移动;
56.机械腕骨节44保证机械端蚹节45上的气动吸盘能够与作业面平行并吸附其上。
57.下面结合附图,对本发明上述优选实施例中的技术方案进一步描述如下。
58.如图2所示,上顶盖1中对称的六条边上拥有六个圆形的电机输出接口11,12,13,14,15和16,用于安装电机输出轴连接器3,每个电机输出接口四周设有四个用以固定机械股骨节电机的连接口111,112,113和114,同时,下底板2中有与上顶盖1的电机输出接口11,12,13,14,15和16以及用于固定电机的连接口111,112,113和114相对应的结构21,22,23,24,25,26,211,212,213和214;在上顶盖1结构上有三个用于完成负重任务的载重接口17,18和19,其中心处的载重接口为一个六边形的稳定接口18,两侧各是一个开有螺纹孔的矩形接口17和19,用于稳定固定所背负的重物。在该结构中,将中心处的载重接口设计为六边形结构,其作用是当垂直作业平台处于各个位姿角度时都能够稳定负重;将两侧的载重接口设计为螺纹矩形结构,其作用是稳定载重模块性能,防止自顶端滑落。
59.如图3,下底板2上设有三个分管不同功能模块的舱室27,28和29,其中中央的第二舱室28为八角形,上部的第一舱室27以及下部的第二舱室29为形状相同且对称的矩形结构;第一舱室27用于放置电源件,第二舱室28用于固定主控板,并通过各类总线,第三舱室29主要用于放置气动件,为整台机器人提供气源。在该结构中,第二腔室设计为八角形,其作用是使得各个股骨节的运动范围增大,提升机械平台整体的移动性能;将第一和第三腔
室设计为形状相同且对称的矩形结构,其作用是方便模块化管理以及未来二次开发中可替换件的使用。
60.第二舱室28设有一个用于总线通过的圆形通孔281以及两个用于支路的圆形通孔282和283。
61.第二腔室28还设有四个大小相同并呈矩形排列的主板连接口284。
62.如图4所示,在机械联动方面,核心控制组件外利用多个电机输出轴连接器3进行连接,其中每一个电机输出轴连接器3均包括两个u型转接片31以及四个d字形电机轴连接法兰32;u型转接片31,其中央拥有一个带有8个螺纹孔的连接口313以及两个设置于u字端部具有8个螺纹孔的连接口312,在其中央具有一个圆形通孔311;u型转接片31的大口径设计可以保证机器人的髋关节可以大范围运动。其d字形电机轴连接法兰32,其拥有一个d字形电机连接口322,背部拥有5个等大的螺纹孔321,其分布由四个螺纹孔等圆角分布,另一螺纹孔位于两螺纹孔中心位置;可以更好的完成d字电机输出轴的固定工作。
63.如图1所示,机械结构相同的每一条机械足4均包括机械股骨节41、机械髌骨节42、机械胫骨节43、机械腕骨节44和机械端蚹节45,形成两个活动关节;机械股骨节41中心镶有两枚电机,附有两个电机轴连接口412和413,两侧均有护板414。机器人通过移动机械股骨节41带动电机输出轴连接器3和机械髌骨节42完成前后移动,并通过机械胫骨节43与机械腕骨节44的配合运动完成收缩和外放,形成横向移动,机器人的各个机械腿以品字形的仿生学步态完成各项移动,其中,机械腕骨节44可以利用其灵活度保证机械端蚹节45上的真空气动吸盘能够与工作面平行,完美吸附于工作面之上。
64.本发明上述实施例提供的六蚹节式多功能垂直作业装置,是一种以六蚹节式机器人为基础的蛛型机器人,包括:主要由上顶盖和下底板包裹的电气部件组成的核心控制组件、电机输出轴连接器以及六条机械结构相同的机械足,其核心控制组件的上顶盖上具有三个特殊的机械插槽作为载重接口,从而具有更强的载重能力和空中的稳定性;其机械足的每个机械端蚹节都拥有一个气动吸盘完成对墙壁的吸附,多个气动吸盘的设置可以更好保障机器人的整体安全性,可靠性与抗风能力。
65.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明的简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
66.本实用新型上述实施例中未尽事宜均为本领域公知技术。
67.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本实用新型的实质内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。