1.本实用新型涉及柔性铰链技术领域,尤其涉及一种用于医疗假体的新型双轴柔性铰链。
背景技术:
2.柔顺机构(柔性机构)是指利用其构成材料的弹性变形来传递或者转换力、运动或者能量的一种特殊机构。相比传统的刚性机构,柔顺机构具有无间隙、免装配、免润滑等优势,更符合生物结构的运动连接特性,在生物医学工程等领域具有广阔的应用前景。如图1所示为刚性四连杆机构与柔性四连杆机构对比。
3.柔性铰链(柔性运动副)是柔顺机构的核心构件之一。柔性铰链是指在外部力或力矩的作用下,利用材料的弹性变形在相邻刚性杆之间产生相对运动的一种运动副结构。柔性机构的性能主要由柔性铰链的特性决定。
4.柔性铰链通常可通过在刚性构件上构造特定形状的相对细薄区域而形成,在外部作用下该细薄区域(柔性铰链)更易发生弯曲变形,从而使柔性铰链两端的刚性结构发生相对运动,实现传动的效果。缺口型柔性铰链是最常见的结构形式,paros于1965年在《how to design flexure hinges》一文中较早地报道了其中两类结构:拉伸缺口型单轴柔性铰链和回转缺口型多轴柔性铰链,如图2(a)和(b)所示。
5.其中,拉伸缺口型柔性铰链在空间弯矩作用下,仅有一个易于弯曲的主旋转轴,故称单轴柔性铰链。类似的,回转缺口型柔性铰链在空间中的主旋转轴是任意的,故称为多轴柔性铰链。
6.为了实现空间两个转动方向(两个主转轴)连接,paros等人还提出了图2(c)所示的正交串联式拉伸缺口型柔性铰链,其具有空间交叉的两个主旋转轴,可称为双轴柔性铰链,也可视为一种柔性机构。
7.lobontiu等人于2003在《two-axis flexure hinges with axially-collocated and symmetric notches》一文中提出了图2(d)所示的矩形横断截面正交同位式拉伸缺口型柔性铰链,可实现空间相交的两个主旋转轴,其相对图2(c)的柔性铰链结构可实现更紧凑的设计和避免空间交叉旋转引入的寄生运动。
8.柔性铰链具有多种结构形式及构造方法,近年来已发展出了多种结构,例如《柔顺机构设计理论与实例》(howell等编著,陈贵敏等译)书籍中所提供的大量柔性铰链单元。但双轴柔性铰链仍只有正交串联式拉伸缺口型和矩形横断截面正交同位式拉伸缺口型两种。
9.现有正交串联式的双轴柔铰增加了空间要求,且转动轴为空间相互垂直交叉,并非相交,易引入寄生运动。
10.现有矩形横断截面正交同位式双轴柔性铰链的两主旋转轴虽然可实现相互垂直相交,但其横断截面为矩形,如图3所示,在矩形顶点存在应力集中现象,限制了转动角度、减少疲劳寿命,增加微裂纹扩张风险。
11.回转缺口型多轴柔性铰链的各向转动刚度相同,不适合各向异性刚度要求的场
合。
技术实现要素:
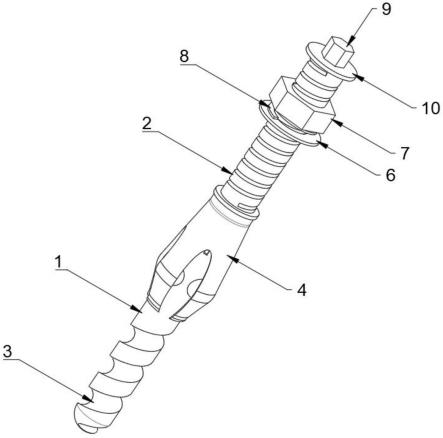
12.本实用新型实施例所要解决的技术问题在于,提供一种用于医疗假体的新型双轴柔性铰链。可解决柔性铰链横断截面顶点处应力集中问题,提高弯曲柔度行程,提高疲劳寿命,可用作人工椎间盘等医疗假体的主体结构。
13.为了解决上述技术问题,本实用新型实施例提供了一种用于医疗假体的新型双轴柔性铰链,包括位于两端的第一刚性块、第二刚性块以及处于两者之间的柔性缺口区,所述柔性缺口区以垂直于沿整体中轴线的横断截面呈椭圆形。
14.其中,所述中轴线可为直线、曲线或两者的组合。
15.其中,所述柔性缺口区沿整体的中轴线的纵断截面上的外轮廓线为关于中轴线对称。
16.其中,所述柔性缺口区横断截面椭圆形的长轴、短轴顶点距离中轴线的距离不相同。
17.其中,所述柔性缺口区在纵断截面上沿所述横断截面椭圆的长轴、短轴顶点的轨迹线所在的纵断截面上的轮廓线为直线、圆锥曲线、割线、正弦曲线、指数正弦曲线、摆线、参数多项式曲线之一或其相互之间的组合。
18.其中,所述柔性缺口区的径向尺寸呈两端到中心渐小变化。
19.实施本实用新型实施例,具有如下有益效果:本实用新型有效地解决了现有目前矩形截面双轴柔性铰链横断截面顶点处应力集中问题,避免了限制转动角度,提高弯曲柔度行程,提高疲劳寿命。
附图说明
20.图1是现有的刚性四连杆机构与柔性四连杆机构对比结构示意图;
21.图2是现有的缺口型柔性铰链类型的结构示意图;
22.其中, (a)拉伸缺口型单轴柔性铰链,(b)回转缺口型多轴柔性铰链,(c)正交串联式拉伸缺口型双轴柔性铰链,(d)矩形横断截面正交同位式拉伸缺口型双轴柔性铰链;
23.图3是矩形横断截面正交同位式拉伸缺口型双轴柔性铰链结构示意图;
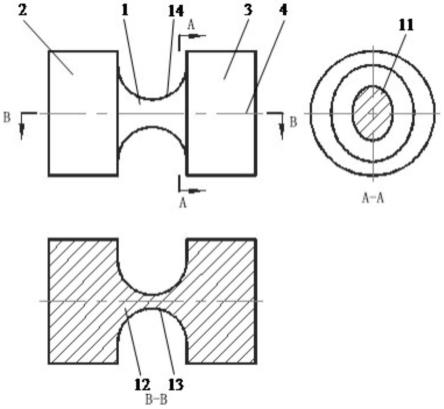
24.图4是本实用新型椭圆横断截面的新型双轴柔性铰链结构三视图;
25.图5是本实用新型的有限元分析结果;
26.图6是关于纵断截面缺口轮廓曲线一及纵断截面缺口轮廓曲线二以纵向长度相等的直线或曲线的实施图例;
27.图7是关于“椭圆
”‑“
正圆”两种纵截面轮廓线组合实施例;
28.图8是关于“椭圆
”‑“
抛物线”两种纵截面轮廓线组合实施例;
29.图9是关于“摆线
”‑“
椭圆”两种纵截面轮廓线组合实施例;
30.图10是两种柔性铰链的性能对比所使用的实施例。
31.图11是本实用新型的直线轴与曲线轴、横截面与变截面的结构对比实施例。
具体实施方式
32.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步地详细描述。
33.如图4所示,本实用新型实施例的一种用于医疗假体的新型双轴柔性铰链,包括了柔性缺口区1以及与其两端相连接为一体的相对刚性块一2和相对刚性块二3,4是贯穿1、2、3结构的几何中轴线。
34.为了方便说明本实用新型的构成,使用图4所示的垂直于中轴线的剖切面定义为横断截面,使用包含中轴线的剖切面定义为纵断截面,横断截面及纵断截面可有多个。
35.其中,横断截面11为柔性缺口区1的区域内与中轴线4垂直所得断面a-a,纵断面12是剖切面沿柔性缺口区1的中轴线4为剖切面b-b进行水平剖切所得断面。
36.在本实施例中,中轴线可为直线、曲线或两者的组合,在本实施例,以恒定直线的中轴线为例进行说明。
37.在本实用新型中,柔性缺口区1以垂直于沿整体中轴线的横断截面上呈椭圆形。
38.如图4所示,柔性缺口区沿整体的中轴线的纵断截面上的外轮廓线为关于中轴线对称,具体而言,在纵断面12内柔性缺口区1的外轮廓线为一对关于中轴线对称的纵断截面缺口轮廓曲线一13,类似的在主视图有纵断截面缺口轮廓曲线二14,即在横断面11上所呈现的椭圆形的长轴顶点在纵断截面缺口轮廓曲线二14上,短轴顶点在纵断截面缺口轮廓曲线一13上。
39.柔性缺口区的横断面关于中心对称。
40.在上述的基础上,横断剖切面a-a沿着中轴线4移动时,横断截面11的长短轴长度分别等于纵断截面缺口轮廓曲线二14和纵断截面缺口轮廓曲线一13与横断截面11的交点到中轴线4的最小距离,且柔性缺口区呈两端到中心渐小变化。
41.椭圆形的长轴、短轴顶点距离中轴线的距离不相同。
42.纵断截面缺口轮廓曲线一13及纵断截面缺口轮廓曲线二14可为纵向长度相等的直线或曲线或其组合,且两者距离中轴线4的距离不同;其中,轮廓曲线(轨迹线)为直线、圆锥曲线、割线、正弦曲线、指数正弦曲线、摆线、参数多项式曲线(如分段样条函数插值曲线、分段hermite多项式插值曲线)之一或其相互之间的组合。
43.柔性缺口区1是柔性铰链工作时的主要变形区域,两端分别与相对刚性块连接,其原理等效于在刚性结构上构造缺口,实现相对薄弱的结构,在外力作用下易于弯曲变形,实现运动、力或能量传递。特别的,其构造缺口的方式通过图4的三视图的主视图及俯视图(纵断截面)可看出,为半径相等的半圆,但纵断截面缺口轮廓曲线与中心轴的距离不相等。进一步的,从三视图的左视图(横断截面)可看出,柔性缺口区内横断截面为椭圆,其长短轴顶点分别在纵断截面缺口轮廓曲线二和纵断截面缺口轮廓曲线一上。
44.如图5所示为本实施例的有限元分析结果,其边界条件是一端固定,另一端施加纯弯矩。图5中,5(a)和5(b)分别为施加绕z轴和绕y轴单位纯弯矩,获得两向转动变形,从结构变形及应力状态可知其两向柔度不相等。
45.如图6所示,本实用新型还提供了关于纵断截面缺口轮廓曲线一13及纵断截面缺口轮廓曲线二14可为纵向长度相等的直线或曲线的实施图例,在图6中,(a)圆,(b)椭圆,(c)直线,(d)抛物线,(e)双曲线,(f)摆线,(g)幂函数,(h)圆-直线组合(又称圆角型),(i)
圆-摆线组合。
46.如图7所示,其是关于“椭圆
”‑“
正圆”两种纵截面轮廓线组合实施例,其中,主视图缺口曲线为椭圆,俯视图缺口曲线为正圆。
47.如图8所示,其是关于“椭圆
”‑“
抛物线”两种纵截面轮廓线组合实施例,其中,主视图缺口曲线为椭圆,俯视图缺口曲线为抛物线。
48.如图9所示,其是关于“摆线
”‑“
椭圆”两种纵截面轮廓线组合实施例,其中,主视图缺口曲线为摆线,俯视图缺口曲线为椭圆。
49.以下将本实用新型与现有的矩形横断截面双轴柔性铰链的“柔度/应力比”性能指标进行对比。
50.柔度:刚度的倒数,由:f=k
·
x,有:c
·
f=x。可通过将柔性铰链一端固定,另一端自由(即悬臂梁条件),自由端施加单位
·
载荷(力/弯矩)时的该自由端的运动(位移/转角)即为柔度。例如由绕y轴的旋转柔度为:c
θymy
=θy/my,如图10所示。
51.柔度/应力比:在计算柔度过程中,当柔铰末端受到单位载荷作用时发生弯曲,将在缺口内产生应力,此时“柔度/应力比”的值越大表明柔性铰链产生同样柔度(位移/转角)情况下应力水平更低,或,在相同应力水平下,可产生更大柔度,疲劳寿命更长。
52.通过以下图10中的两个柔性铰链的性能对比,体现本实用新型实施例的行程大、应力低的优势。图10是具有相同圆弧缺口轮廓的椭圆横截面(a)与矩形横截面(b)柔性铰链对比,缺口轮廓分别通过r和θm确定,最小横截面尺寸通过ta和tb确定。
53.分别针对具有相同圆弧缺口轮廓的椭圆横截面图10 (a)与矩形横截面10(b)柔性铰链设计了3个算例进行有限元分析,结构尺寸如表1所示,材料选取铝合金,分别计算各算例的“柔度/应力比”如表2所示,结果表明各算例中,椭圆横截面柔性铰链比矩形横截面柔铰铰链的“柔度/应力比”高4%~18%,即:具有相同缺口轮廓时,椭圆横截面柔性铰链在相同应力水平下可产生更大柔度,或,产生相同柔度时,应力水平更低,疲劳寿命更长。
54.表1:图11中两种柔铰各3个算例的主要结构尺寸
[0055][0056]
表2:图10中两种柔铰各3个算例的“柔度/应力比”结果对比
[0057][0058]
本实用新型通过椭圆横断截面替代矩形横断截面,消除矩形顶点的应力集中问题,同时可实现空间相交两个主旋转轴及两向异性刚柔度。通过有限元分析对比发现,本实用新型的柔性铰链比矩形截面可实现更高的“柔度/应力”比,即实现相同转动柔度(位移-力之比,刚度的倒数)的情况下,柔性铰链区域内结构变形产生的应力更小。
[0059]
以上所揭露的仅为本实用新型一种较佳实施例而已,当然不能以此来限定本实用新型之权利范围,因此依本实用新型权利要求所作的等同变化,仍属本实用新型所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。