1.本技术涉及终端技术领域,尤其涉及一种可折叠的电子设备。
背景技术:
2.近年来,随着屏幕技术的不断发展,特别是柔性屏的产生,电子设备得以开发出更多的产品形态,折叠屏手机就是目前新兴的一种产品形态。折叠屏手机一般包括轴盖以及位于轴盖两侧的机身,每一侧机身可以与轴盖通过至少一个摆臂连接,摆臂可绕轴盖内的旋转轴转动,当用户对机身施力以转动机身时,机身可绕旋转轴旋转,实现展开和折叠。
3.为了在用户开合机身时提供一定的阻尼力,以提升手感,轴盖内还设置有与摆臂连接的阻尼部件,阻尼部件包括一对沿旋转轴方向压力接触的凸轮部件,由凸轮部件的型面设计和压力接触产生的摩擦力提供阻尼力,使凸轮部件实现压力接触的压力则由设置于轴盖内的弹簧形变时产生的弹性力提供。
4.目前,技术人员希望折叠屏手机能够具备freestop特性,即折叠屏手机的机身能够在未受外力作用时停留在当前位置,以提升用户的使用体验。实现freestop特性的一种可行的方式是增加阻尼部件系统的摩擦系数,而摩擦系数与弹簧的数量和尺寸有关:弹簧数量越多,摩擦系数越大,反之,弹簧数量越少,摩擦系数越小;弹簧尺寸越大,摩擦系数越大,反之弹簧尺寸越小,摩擦系数越小。因此,目前的折叠屏手机通常采用增加弹簧数量和增大弹簧直径的方式实现freestop特性。然而,随着弹簧数量的增加和弹簧尺寸的增大,弹簧占用的机身空间更大,导致折叠屏手机的整机厚度增加,重量增加,不利于机身的轻薄。
技术实现要素:
5.本技术实施例提供了一种可折叠的电子设备,能够在保持机身轻薄的同时实现freestop特性。该可折叠的电子设备包括:轴盖、机身、摆臂、第一凸轮部件、第二凸轮部件和弹性体;第一凸轮部件和第二凸轮部件同轴设置于轴盖内;第一凸轮部件通过摆臂连接至机身,且被配置为可绕其中心轴转动,使机身在外力作用下绕中心轴折叠或展开;第一凸轮部件包括面向第二凸轮部件的第一端面,第二凸轮部件包括面向第一凸轮部件的第二端面,第一端面和第二端面均包括至少一个凸轮型面;第二凸轮部件被配置为可沿中心轴方向滑动;弹性体与第二凸轮部件连接,被配置为向第二凸轮部件施加弹性力,使第一凸轮部件的第一端面在弹性力的作用下与第二凸轮部件的第二端面保持接触;当机身展开或折叠至完全展开与完全折叠之间的某个位置时,第一凸轮部件与第二凸轮部件接触于凸轮型面的锁止段,锁止段的法方向与中心轴的夹角小于或者等于arctanμ,μ为第一凸轮部件与第二凸轮部件之间的摩擦系数。
6.本技术实施例提供的可折叠的电子设备,第一凸轮部件与第二凸轮部件的接触面包括至少一个相互配合的凸轮型面,且凸轮型面包括锁止段,锁止段的法方向与中心轴的夹角小于或者等于μ的反正切函数,μ为第一凸轮部件与第二凸轮部件之间的摩擦系数,轮主动件在其转动方向所受的合力为0,因此机身不会自动展开或闭合,实现freestop特性。
7.在一种实现方式中,第一端面和第二端面为相配合的环形端面;第一端面和第二端面均包括数量相等的多个凸轮型面,且多个凸轮型面呈环形阵列分布。这样第一凸轮部件和第二凸轮部件沿中心轴c1方向的受力比较均匀,提高部件的使用寿命。
8.在一种实现方式中,锁止段绕中心轴c1所转过的角度β大于或者等于90
°
。由于折叠屏手机每一侧机身从完全折叠至完全展开状态所转动的角度为90
°
,因此,如果锁止段绕中心轴c1所转过的角度β大于或者等于90
°
,第一凸轮部件和第二凸轮部件可以在机身折叠或者展开的过程中,始终在锁止段相接触,使机身在任意位置都具备freestop特性。
9.在一种实现方式中,凸轮型面包括推程段和回程段,锁止段是推程段的一部分;锁止段沿推程段的抬升方向包括多个锁止平面,任一锁止平面的法方向与中心轴的夹角小于或者等于arctanμ。这样,随着机身的转动到不同位置,第一凸轮部件和第二凸轮部件可以在不同的锁止平面实现面接触,在具备freestop特性的同时,还能通过面接触减小第一凸轮部件和第二凸轮部件之间的接触应力,提高第一凸轮部件和第二凸轮部件的使用寿命。
10.在一种实现方式中,在推程段的抬升方向上,多个锁止平面的法方向与中心轴的夹角依次减小。这样,推程段的坡度可以在其抬升方向上逐渐平缓,最终在推程段的顶部与回程段实现平滑的过渡。
11.在一种实现方式中,在推程段的抬升方向上,多个锁止平面的长度依次减小。这样,随着推程段的坡度在其抬升方向上逐渐平缓,锁止平面的划分更加细致,使得推程段的顶部的坡度变化更加平滑,有利于提升用户转动机身时的手感。
12.在一种实现方式中,相邻两个锁止平面之间通过曲面过渡连接。这样,当用户转动机身使第一凸轮部件和第二凸轮部件产生相对滑动时,第一凸轮部件和第二凸轮部件的相接触面可以在各个锁止平面之间平滑过渡,避免在滑动到相邻两个锁止平面之间时产生振动,有利于提升用户转动机身时的手感。
13.在一种实现方式中,锁止段起始于推程段的中下部,且沿推程段的抬升方向形成至凸轮型面的顶部,且在凸轮型面的顶部与回程段连接。这样,相比于传统方案,锁止段相当于覆盖了推程段的大部分和停止段的全部,当电子设备的机身从完全展开状态转动至完全展开状态时,第一凸轮部件和第二凸轮部件可以实现全程接触于锁止段,实现freestop特性。
14.在一种实现方式中,锁止段与回程段通过曲面连接。这样,当用户转动机身使第一凸轮部件和第二凸轮部件产生相对滑动时,第一凸轮部件和第二凸轮部件的相接触面可以在锁止段与回程段之间平滑过渡,避免在滑动到锁止段与回程段之间时产生振动,有利于提升用户转动机身时的手感。
15.在一种实现方式中,锁止段的长度大于推程段的一半。
16.在一种实现方式中,弹性体为弹簧,弹簧与第二凸轮部件同轴设置,且沿中心轴方向为压缩状态,以沿中心轴方向向第二凸轮部件施加弹性力。
17.在一种实现方式中,锁止段设置于第一端面和/或第二端面的至少一个凸轮型面上。
附图说明
18.图1是目前一种折叠屏手机的形态示意图;
19.图2是目前一种折叠屏手机的内部结构示意图;
20.图3是目前一种凸轮型面的示意图;
21.图4是凸轮主动件和凸轮从动件的受力分析图;
22.图5是本技术实施例提供的可折叠电子设备的部分结构示意图;
23.图6是本技术实施例示出的接触面的结构示意图;
24.图7是本技术实施例示出的凸轮型面的结构示意图;
25.图8是本技术实施例示出的凸轮主动件和凸轮从动件接触于锁止段的示意图;
26.图9是凸轮主动件和凸轮从动件接触于锁止段时的受力分析图;
27.图10是本技术实施例示出的凸轮型面在环形端面的分布方式示意图。
28.图示说明:
29.其中:10-机身,11-显示屏,20-轴盖,30-摆臂,40-阻尼部件,41-凸轮主动件,42-凸轮从动件,43-弹簧,50-凸轮型面,51-推程段,52-停止段,53-回程段,100-第一凸轮部件,200-第二凸轮部件,300-弹性体,400-凸轮型面,410-推程段,411-锁止段,412-锁止平面,420-回程段,413-曲面,414-曲面。
具体实施方式
30.近年来,随着屏幕技术的不断发展,特别是任意可弯曲的柔性屏的产生,电子设备得以开发出更多的产品形态,其中,折叠屏手机就是目前新兴的一种产品形态。
31.图1是目前一种折叠屏手机的形态示意图。如图1所示,目前,折叠屏手机根据其屏幕弯折方向的不同可以包括内折叠屏手机和外折叠屏手机等。其中,内折叠屏手机如图1中的结构a所示,外折叠屏手机如图1中的结构b所示。内折叠屏手机的机身10能够向显示屏11一侧折叠,显示屏11在机身10折叠后隐藏于机身10内侧,由此形成显示屏11在机身10折叠状态下隐藏,在机身10展开状态下呈现的效果。外折叠屏手机的机身10能够向显示屏11的背面一侧折叠,显示屏11在机身10折叠后环绕于机身10外侧,由此形成显示屏11在机身10折叠状态下环绕机身10,形成环绕屏,在机身10展开状态下呈现正常直屏的效果。
32.图2是目前一种折叠屏手机的内部结构示意图。下面结合图2示例性的说明目前折叠屏手机的机身是如何实现折叠或展开的。如图2所示,该折叠屏手机包括:轴盖20和机身10。其中,对于可以实现一次对折的折叠屏手机来说,其机身10可以包括两个部分,分别设置于轴盖20的两侧,折叠屏手机的每一侧机身10可以与轴盖20通过至少一个摆臂30连接。摆臂30的一端位于轴盖20内,被配置为可绕轴盖20内的旋转轴转动,摆臂30的另一端延伸至一侧机身10,与机身10连接。这样,当用户对机身10施力以转动机身10时,机身10可绕旋转轴旋转,实现展开和折叠。
33.另外,为了在用户开合机身10时,提供一定的阻尼力,以提升手感,轴盖20内还设置有与摆臂30连接的阻尼部件40。该阻尼部件40例如可以是凸轮阻尼部件、齿轮阻尼部件等,用于在机身10带动摆臂30产生转动时,向摆臂30施加与转动方向相反的阻尼力,该阻尼力可以通过摆臂30和机身10传递到用户手上,从而提升用户的手感和设备的高级感。
34.图2还示例性的示出了阻尼部件的具体结构。如图2所示,该阻尼部件40包括凸轮主动件41、凸轮从动件42和弹簧43。其中,摆臂30以凸轮主动件41的中心轴c1作为其转动时的旋转轴,凸轮主动件41和凸轮从动件42沿其中心轴c1方向并列且同轴设置。凸轮主动件
41与摆臂30位于轴盖20内的一端连接,且凸轮主动件41被配置为沿其中心轴c1方向固定,但可绕其中心轴c1转动。凸轮从动件42被配置为不可绕中心轴c1转动,但可沿中心轴c1方向产生滑动。弹簧43与凸轮从动件42连接,被配置为向凸轮从动件42施加弹性力ft,该弹性力ft的方向可以与中心轴c1平行,且朝向凸轮主动件41,这样,凸轮从动件42可以弹性力ft的作用下沿中心轴c1方向与凸轮主动件41保持压力接触,当用户转动机身10时,摆臂30带动凸轮主动件41绕中心轴c1产生旋转,从而与凸轮从动件42在其接触面产生相对滑动。
35.为提供阻尼力,凸轮主动件41与凸轮从动件42的接触面可以包括相互配合凸轮型面50。图3是目前一种凸轮型面50的示意图。在图3中,当折叠屏设设备的机身从折叠状态展开时,凸轮主动件41相对于凸轮从动件42向图3的左侧滑动,凸轮从动件42相对于凸轮主动件41向图3中的右侧滑动。如图3所示,该凸轮型面50沿凸轮主动件41或凸轮从动件42的滑动方向依次包括:推程段51、停止段52和回程段53。推程段、停止段和回程段是机械领域用于描述凸轮结构的技术术语,其中:推程段51是指当凸轮主动件41相对于凸轮从动件42滑动时,使凸轮从动件42远离凸轮主动件41的区段,因此推程段51在凸轮主动件41/凸轮从动件42的滑动方向具有一定的上升角;停止段52是指当凸轮主动件41相对于凸轮从动件42滑动时,使凸轮从动件42相对于凸轮主动件41距离不变的区段,因此停止段52与中心轴c1垂直;回程段53是指当凸轮主动件41相对于凸轮从动件42滑动时,使凸轮从动件42靠近凸轮主动件41的区段,因此回程段53在凸轮主动件41/凸轮从动件42的滑动方向具有一定的下降角。一般来说,当折叠屏手机的机身在完全折叠状态和完全展开状态之间转动时,凸轮主动件41和凸轮从动件42会在会在凸轮型面的推程段51或停止段52形成压力接触并滑动。
36.图4是凸轮主动件和凸轮从动件的受力分析图。当凸轮主动件41与凸轮从动件42接触于凸轮型面的推程段51时,凸轮从动件42在弹性力ft的作用下会向凸轮主动件41施加一个压力fn,该压力fn作用于凸轮主动件41的推程段51的法方向,且fn=ft
×
cosα,ft为弹簧的弹性力,α为推程段51法方向与弹性力ft的夹角。这样,fn会在凸轮主动件41滑动的反方向上产生一个分量fn
×
sinα,该分量为阻尼力的一部分,用户转动机身时,对机身施加的力需要克服这个分量才能使凸轮主动件41产生转动。
37.进一步如图4所示,当凸轮主动件41与凸轮从动件42接触于推程段51时,凸轮从动件42受到的弹性力ft在推程段51切方向上的分量为ft
×
sinα,弹性力ft在推程段的法方向上的分量为ft
×
cosα。因此,凸轮从动件42在ft
×
sinα的作用下会产生一个沿推程段51的切方向滑动的趋势,此时,凸轮从动件42在ft
×
cosα的作用下会受到一个与ft
×
sinα方向相反的摩擦力fm,该摩擦力fm用于阻止凸轮从动件42沿推程段的切方向产生滑动。根据力学知识可知:摩擦力fm的大小与凸轮主动件41与所述凸轮从动件42之间的摩擦系数μ(这里的摩擦系数μ整合了折叠屏手机内用于实现机身转动的整体轴系结构的系统摩擦)和凸轮主动件41与所述凸轮从动件42的运动状态有关;当凸轮从动件42相对于凸轮主动件41静止时,摩擦力fm以静摩擦力的形式存在,其大小与ft
×
sinα相等且方向相反,但不大于μ
×
fn(即μ
×
ft
×
cosα);当凸轮从动件42相对于凸轮主动件41滑动时,摩擦力fm以滑动摩擦力的形式存在,其大小等于μ
×
ft
×
cosα,方向与凸轮从动件42的滑动方向相反。
38.目前,技术人员希望折叠屏手机能够具备freestop特性,即折叠屏手机的机身能够在不受外力作用时停留在当前位置。根据力学知识可知:当ft
×
sinα>μ
×
ft
×
cosα时,意味着凸轮主动件41与凸轮从动件42在推程段51最大静摩擦力小于ft
×
sinα,不足以使凸
轮从动件42沿推程段51的切方向达到受力平衡,因此凸轮从动件42会与凸轮主动件41会产生相对滑动,无法实现freestop特性;当ft
×
sinα≤μ
×
ft
×
cosα时,凸轮主动件41与凸轮从动件42在推程段51的最大静摩擦力大于或者等于ft
×
sinα,使凸轮从动件42沿推程段51的切方向达到受力平衡,因此凸轮主动件41与凸轮从动件42会保持相对静止状态,实现freestop特性。
39.基于上述实现freestop特性的条件,增大摩擦系数μ以使ft
×
sinα≤μ
×
ft
×
cosα是实现freestop特性的一种可行的手段,而在阻尼部件中,摩擦系数μ与弹簧的数量和尺寸有关:弹簧数量越多,摩擦系数越大,弹簧数量越少,摩擦系数越小;弹簧尺寸越大,摩擦系数越大,弹簧尺寸越小,摩擦系数越小。因此,目前的折叠屏手机通常采用增加弹簧数量和增大弹簧直径的方式得到更大的摩擦系数μ,以实现freestop特性。然而,随着弹簧数量的增加和弹簧尺寸的增大,弹簧占用的机身空间更大,导致折叠屏手机的整机厚度增加,重量增加,不利于机身的轻薄。
40.本技术实施例提供了一种改进的可折叠的电子设备,能够在保持机身轻薄的同时实现freestop特性。该电子设备例如可以是折叠屏手机、平板电脑、笔记本电脑、电子书阅读器、无线耳机仓、可穿戴设备(例如虚拟现实vr眼镜、智能手表、智能手环、头戴式显示装置等)、以铰链结构连接两个或者多个部分的电子设备、或者其他产品形态的电子设备,这里不做具体限定。
41.图5是本技术实施例提供的可折叠电子设备的部分结构示意图。如图5所示,该电子设备包括:机身10、轴盖20、摆臂30、第一凸轮部件100、第二凸轮部件200和弹性体300。其中:第一凸轮部件100和第二凸轮部件200可以是柱体结构,同轴且并列设置于所述轴盖20内,第一凸轮部件100例如可以是凸轮主动件,第二凸轮部件200例如可以是凸轮从动件;第一凸轮部件100被配置为沿其中心轴c1方向固定,但可绕其中心轴c1转动,且第一凸轮部件100通过摆臂30与设置于轴盖20一侧的机身10连接,这样,当用户对机身10施加一定的弯折力时,机身10可以带动摆臂30绕第一凸轮部件100的中心轴c1转动,以实现机身10绕中心轴c1展开或折叠。第二凸轮部件200被配置为沿垂直于中心轴c1的方向固定,但可沿中心轴c1方向产生滑动。弹性体300与第二凸轮部件200连接,被配置为向第二凸轮部件200施加弹性力ft,该弹性力ft的方向与中心轴c1平行,且朝向第一凸轮部件100,这样,第二凸轮部件200可以在弹性力ft的作用下沿中心轴c1方向与第一凸轮部件100保持压力接触,当第一凸轮部件100绕中心轴c1转动时,第一凸轮部件100与第二凸轮部件200在其彼此的接触面会产生相对滑动。
42.进一步如图5所示,第一凸轮部件100与第二凸轮部件200的接触面可以包括至少一个相互配合的凸轮型面400,该凸轮型面400包括锁止段411(图5中的线条加粗的区段),并且锁止段411的法方向与中心轴c1的夹角α小于或者等于μ的反正切函数,即α≤arctanμ,这里的μ指的是第一凸轮部件100与第二凸轮部件200之间的摩擦系数,该摩擦系数整合了该电子设备内用于实现机身转动的整体轴系结构的系统摩擦。
43.这样,当第一凸轮部件100与第二凸轮部件200在锁止段411相接触时,由于α≤arctanμ,因此弹性力ft在锁止段411的切方向的分量ft
×
sinα和法方向的分量ft
×
cosα能够满足ft
×
sinα≤μ
×
ft
×
cosα,第一凸轮部件100与第二凸轮部件200在锁止段411的最大静摩擦力大于或者等于ft
×
sinα,使第二凸轮部件200沿锁止段411的切方向达到受力平
衡,因此第一凸轮部件100与第二凸轮部件200会保持相对静止状态,实现freestop特性。
44.本技术实施例中,弹性体300可以是弹簧、弹片等可以通过形变产生弹性力的部件。当弹性体300采用弹簧实现时,该弹簧设置于第二凸轮部件200的背对于第一凸轮部件100的一端,且与第二凸轮部件200同轴设置。弹簧一端与第二凸轮部件200相接触,且沿中心轴c1方向被配置为压缩状态,这样,弹簧可以沿中心轴c1方向向第二凸轮部件200施加弹性力ft,弹性力ft与弹簧的压缩量成正比,即ft=kx,其中,k为弹簧的劲度系数,x为弹簧的压缩量。
45.图6是本技术实施例示出的接触面的结构示意图。如图6所示,第一凸轮部件100和第二凸轮部件200可以包括相配合的环形端面,为便于描述,这里将第一凸轮部件100的环形端面称作第一端面110,将第二凸轮部件200的环形端面称作第二端面210。其中,第一端面110和第二端面210可以包括数量相等的多个凸轮型面400(图6中以不同深度的阴影进行表示),并且,多个凸轮型面400依次首尾相连,且围绕中心轴c1方向呈环形阵列分布。当第一端面110和第二端面210包括数量相等的多个凸轮型面400时,位于第一端面110的多个凸轮型面400可以与位于第二端面210的多个凸轮型面400一一对应形成压力接触。当第一凸轮部件400绕中心轴c1转动时,第一凸轮部件100与第二凸轮部件200会绕中心轴c1发生相对扭转,从而产生相对滑动。
46.进一步如图6所示,在一种实现方式中,第一端面110和第二端面210均可以包括3个凸轮型面400,相邻两个凸轮型面400之间的夹角为120
°
,这样,每个凸轮型面400沿中心轴c1方向的投影是一个圆心角为120
°
弧形,每个凸轮型面400构成了环形端面的三分之一,第一端面110与第二端面210可以围绕中心轴c1均匀地形成三处压力接触,使第一凸轮部件100和第二凸轮部件200沿中心轴c1方向的受力比较均匀,提高部件的使用寿命。
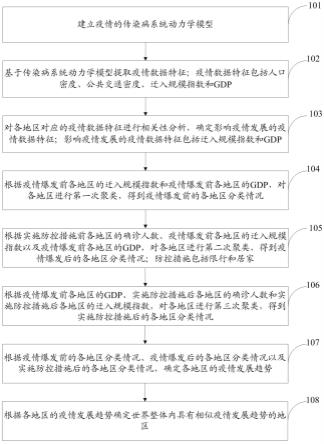
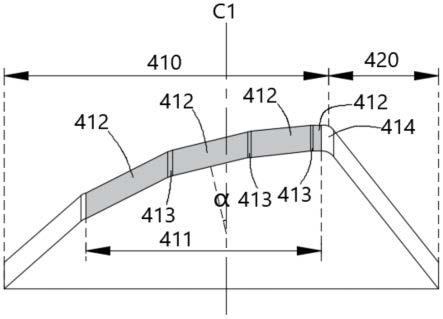
47.图7是本技术实施例示出的凸轮型面400的结构示意图。
48.图8是本技术实施例示出的第一凸轮部件100和第二凸轮部件200接触于锁止段411的示意图。
49.为便于对凸轮型面400的结构进行描述,图7和图8对凸轮型面400从弧形进行了展开。
50.结合图7和图8所示,在一种实现方式中,凸轮型面400沿第一凸轮部件100或第二凸轮部件200的滑动方向依次包括:推程段410和回程段420。其中:推程段410是指当第一凸轮部件100相对于第二凸轮部件200滑动时,使第二凸轮部件200远离第一凸轮部件100的区段,推程段410沿第二凸轮部件200相对于第一凸轮部件100的滑动方向具有一定的上升角;回程段420是指当第一凸轮部件100相对于第二凸轮部件200滑动时,使第二凸轮部件200靠近第一凸轮部件100的区段,回程段420沿第二凸轮部件200相对于第一凸轮部件100的滑动方向具有一定的下降角。
51.与图3示出的凸轮型面相比,本技术实施例图7和图8示出的凸轮型面400仅包括推程段410和回程段420,而不包括停止段,推程段410直接与回程段420相连接。图7和图8示出的凸轮型面400可以视作在图3示出的凸轮型面400的基础上,将推程段410延伸至原有停止段的区域,替代原有的停止段,从而增加了推程段410的长度。在推程段410抬升高度不变的情况下,增加推程段410的长度有利于使推程段410的坡度更加平缓,减小推程段410的法方向与中心轴c1的夹角α。
52.本技术实施例中,锁止段411(在图7中以阴影表示,在图8中以实线表示)可以沿推程段410的抬升方向,从推程段410的中下部开始一直延伸至推程段410的顶部,且在推程段410的顶部与回程段420连接。相比于图3示出的结构,锁止段411相当于覆盖了推程段51的大部分和停止段52的全部。这样,当电子设备的机身从完全展开状态转动至完全展开状态时,第一凸轮部件100和第二凸轮部件200可以几乎全程接触于锁止段411。
53.进一步结合图7和图8所示,在一种实现方式中,锁止段411沿推程段410的抬升方向包括多个锁止平面412,不同锁止平面412的法方向与中心轴c1的夹角α不同,但是任一锁止平面412的法方向与中心轴c1的夹角α小于或者等于arctanμ。这样,随着机身的转动到不同位置,第一凸轮部件100和第二凸轮部件200可以在不同的锁止平面412实现面接触,在具备freestop特性的同时,还能通过面接触减小第一凸轮部件100和第二凸轮部件200之间的接触应力,提高第一凸轮部件100和第二凸轮部件200的使用寿命。
54.进一步如图7和图8所示,在一种实现方式中,在推程段410的抬升方向上,多个锁止平面412的法方向与中心轴c1的夹角α依次减小。这样,推程段410的坡度可以在其抬升方向上逐渐平缓,最终在推程段410的顶部与回程段420实现平滑的过渡。例如,如果锁止段411在推程段410的抬升方向上依次包括4个锁止平面412a、412b、412c、412d,分别对应夹角α1、α2、α3、α4,那么则满足,arctanμ>α1>α2>α3>α4≥0
°
。
55.进一步如图7和图8所示,在一种实现方式中,在推程段410的抬升方向上,多个锁止平面412的长度依次减小。这样,随着推程段410的坡度在其抬升方向上逐渐平缓,锁止平面412的划分更加细致,使得推程段410的顶部的坡度变化更加平滑,有利于提升用户转动机身时的手感。
56.进一步如图7和图8所示,在一种实现方式中,相邻两个锁止平面412之间通过曲面413过渡连接。这样,当用户转动机身使第一凸轮部件100和第二凸轮部件200产生相对滑动时,第一凸轮部件100和第二凸轮部件200的相接触面可以在各个锁止平面412之间平滑过渡,避免在滑动到相邻两个锁止平面412之间时产生振动,有利于提升用户转动机身时的手感。
57.进一步如图7和图8所示,在一种实现方式中,锁止段411与回程段420通过曲面414过渡连接。这样,当用户转动机身使第一凸轮部件100和第二凸轮部件200产生相对滑动时,第一凸轮部件100和第二凸轮部件200的相接触面可以在锁止段411与回程段420之间平滑过渡,避免在滑动到锁止段411与回程段420之间时产生振动,有利于提升用户转动机身时的手感。
58.图9是第一凸轮部件100和第二凸轮部件200接触于锁止段411时的受力分析图。
59.如图9所示,当第一凸轮部件100和第二凸轮部件200接触于锁止段411时,一方面,第二凸轮部件200在弹性力ft=k
×
x沿垂直于锁止段411的法方向向第一凸轮部件100施加一个压力fn,fn=ft
×
cosα;压力fn在第一凸轮部件100的转动方向(即垂直于旋转轴c1的方向)会产生一个分量fd1,fd1=fn
×
sinα=ft
×
cosα
×
sinα,该分量fd1会使第一凸轮部件100产生向图9中右侧转动的趋势;另一方面,第一凸轮部件100在压力fn的作用下,还会在其与第二凸轮部件200的接触面受到一个摩擦力fm,该摩擦力fm的方向平行于锁止段411的切方向,用于阻止第一凸轮部件100沿锁止段411的切方向产生滑动,摩擦力fm会产生一个与分量fd1方向相反的分量fd2,fd2=fm
×
cosα。
60.根据力学知识可知,如果要使第一凸轮部件100在不受到用户弯折力时保持静止,即实现freestop特性,则应有fd1=fd2,即fn
×
sinα=fm
×
cosα,此时摩擦力fm为静摩擦力,其最大值为μ
×
ft
×
cosα,因此,fd1=fd2成立的条件是ft
×
cosα
×
sinα≤μ
×
ft
×
cosα
×
cosα,即tanα≤μ。也就是说:
61.当α≤arctanμ时,第一凸轮部件100在其转动方向所受的合力为0,因此机身不会自动展开或闭合,实现freestop特性;
62.当α>arctanμ时,fd1>fd2,第一凸轮部件100在其转动方向所受的合力大于0,因此会产生转动,使机身自动展开或闭合,不具备freestop特性。
63.本技术实施例将θ=arctanμ定义为自锁角,当μ≈0.2时,θ≈10
°
。
64.图10是本技术实施例示出的凸轮型面在环形端面的分布方式示意图。
65.如图10所示,在一种实现方式中,当环形端面包括多个凸轮型面400时,锁止段411可以设置于环形端面的至少一个凸轮型面400上。以第一端面110为例,当其包括多个凸轮型面400时:如图10的a方式所示,锁止段411可以设置在一部分凸轮型400面上,其余凸轮型面400则不设置锁止段411;如图10的b方式所示,锁止段411也可以设置在每一个凸轮型面400上。
66.另外,可以理解的是,对于图1所示形态的折叠屏手机来说,其每一侧机身从完全折叠至完全展开状态所转动的角度为90
°
。基于此,如图10所示,本技术实施例优选每一个锁止段411绕中心轴c1所转过的角度β大于或者等于90
°
,或者接近90
°
,例如45
°
~90
°
之间的任意角度。这样,当机身折叠或者展开时,第一凸轮部件和第二凸轮部件可以始终或者大部分在锁止段411相接触,使机身在任意位置或者大部分位置都具备freestop特性。
67.由以上技术方案可知,本技术实施例提供的电子设备,第一凸轮部件与第二凸轮部件的接触面包括至少一个相互配合的凸轮型面,且凸轮型面包括锁止段,锁止段的法方向与中心轴的夹角小于或者等于μ的反正切函数,μ为第一凸轮部件与第二凸轮部件之间的摩擦系数,轮主动件在其转动方向所受的合力为0,因此机身不会自动展开或闭合,实现freestop特性。
68.容易理解的是,本领域技术人员在本技术提供的几个实施例的基础上,可以对本技术的实施例进行结合、拆分、重组等得到其他实施例,这些实施例均没有超出本技术的保护范围。
69.以上的具体实施方式,对本技术的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上仅为本技术的具体实施方式而已,并不用于限定本技术的保护范围,凡在本技术的技术方案的基础之上,所做的任何修改、等同替换、改进等,均应包括在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。