1.本发明涉及太阳能应用与公共设施技术领域,具体为一种多探头并行识别的零能耗自动分类垃圾箱。
背景技术:
2.我国的发展状况趋于与垃圾的增长量成正比,除了在生产地的处理处置和自循环以外,工业产品和农业产品中的大部分都将进入城市范畴来消费和作为废物需要得到妥善处置。进入生活垃圾范畴的,需要通过环卫系统来帮助分离和收集,垃圾自动分类就显得尤为重要。目前市场上的存在的垃圾自动分类系统大多数需要国家电网给垃圾处理装置提供电力,整个过程能源的消耗并不符合当今节能减排理念,“零能耗”地处理垃圾这一目标。并且同类型采用卷积神经网络图像识别技术的垃圾箱,都是采用单探头识别技术,分类过程中需要等待上一个垃圾识别完成才能继续工作,因此整体分类时间长、工作效率低。要解决上述问题,就要合理解决垃圾分类过程中的能耗问题,采用光伏发电,充分利用太阳能实现“零能耗”工作。更进一步的要求是实现垃圾分类实用性,提高垃圾分类效率。因此,建立一套“零能耗”、多探头并行识别模式的垃圾自动分类系统是非常必要的。
3.现有技术一的缺点:
4.(1)实用单个摄像头进行识别分类,同时仅能分类单个垃圾,并且需要耗费时间等待分类结果,实用性差;
5.(2)分类装置简单,工作效率低;
6.(3)功能单一,在驱虫鼠、除异味、防火、夜间照明等方面缺乏相关设施;因此,不满足现有的需求,对此我们提出了一种多探头并行识别的零能耗自动分类垃圾箱。
技术实现要素:
7.1.发明要解决的技术问题
8.本发明的目的在于克服实用单个摄像头进行识别分类,同时仅能分类单个垃圾,并且需要耗费时间等待分类结果,实用性差等问题,提供了一种多探头并行识别的零能耗自动分类垃圾箱,以解决以上不足,方便使用。
9.2.技术方案
10.为实现上述目的,本发明提供如下技术方案:一种多探头并行识别的零能耗自动分类垃圾箱,包括金属框架,所述金属框架的一端设置有太阳能板,且太阳能板的内侧设置有蓄电池模块,所述金属框架的顶部设置有集水窗,且集水窗与金属框架通过螺钉连接,所述金属框架外表面的一侧设置有垃圾投放口,且垃圾投放口的内部设置有升降闸板,所述垃圾投放口的一侧设置有液晶显示屏,且液晶显示屏与金属框架通过螺钉连接,所述金属框架外表面的另一侧设置有夜间照明灯,且夜间照明灯与金属框架通过卡槽连接。
11.优选的,所述集水窗的外表面设置有闸窗,且闸窗的外表面设置有金属筛网,所述集水窗的下方设置有悬挂梁架,且悬挂梁架设置在金属框架的内部,所述悬挂梁架的下方
设置有传送带,且传送带与金属框架通过支架连接。
12.优选的,所述悬挂梁架的顶部设置有蓄水箱,且蓄水箱的顶部设置有单向阀嘴,所述悬挂梁架的底部设置有电控托轨,且电控托轨有四个,所述电控托轨的下方设置有液压舵机,且液压舵机与电控托轨滑动连接。
13.优选的,所述液压舵机的底部设置有机械推板,且机械推板通过角度套轴与液压舵机转动连接,所述液压舵机的外侧设置有摄像模组,且摄像模组与液压舵机组合连接。
14.优选的,所述电控托轨之间设置有机箱模组,且机箱模组的内部设置有泵体和电机,所述机箱模组的外表面设置有超声波驱虫仪,且超声波驱虫仪的四周均设置有消防喷淋头。
15.优选的,所述传送带的一端设置有分离组件,且分离组件设置在垃圾投放口的内侧,所述传送带一侧的下方设置有阵列垃圾箱组,且阵列垃圾箱组有四个。
16.优选的,所述阵列垃圾箱组包括干垃圾箱、湿垃圾箱、有害垃圾箱和可回收垃圾箱,且干垃圾箱、湿垃圾箱、有害垃圾箱和可回收垃圾箱的顶部均设置有电源箱盖,所述湿垃圾箱内部的一侧设置有温度传感器,且温度传感器的型号设置为xh-t106,所述湿垃圾箱的底部设置有半导体制冷组件,且半导体制冷组件与湿垃圾箱通过螺钉连接。
17.优选的,所述电源箱盖包括上盖板和下盖板,且上盖板与下盖板通过转轴转动连接,所述下盖板的底部设置有红外线传感器,且红外线传感器的型号设置为e3f-ds30f1,所述红外线传感器的两侧均设置有紫外线灭菌灯,且紫外线灭菌灯与电源箱盖电性连接。
18.优选的,所述分离组件包括储备两用电箱,且储备两用电箱的内部设置有水箱,所述储备两用电箱底部的一侧设置有排污阀,且排污阀与储备两用电箱通过法兰连接。
19.优选的,所述储备两用电箱的顶部设置有分离转台,且分离转台与储备两用电箱转动连接,所述分离转台的中心表面设置有中心汇流槽,且中心汇流槽的内部设置有滤网,所述分离转台的一侧设置有金属扫板,且金属扫板通过旗轴与储备两用电箱转动连接。
20.优选的,所述金属框架上开设有太阳能板安装槽,所述太阳能板安装槽内转动连接有太阳能板安装框,所述太阳能板安装框左右两侧固定连接有角度调节短轴,所述太阳能板安装槽左右两侧面开设有安装孔,所述角度调节短轴远离所述太阳能板安装框的一端转动连接在所述安装孔内,且所述角度调节短轴上键连接有角度调节齿轮,所述安装孔内转动连接有齿环,所述齿环与所述角度调节齿轮相互啮合,所述齿环上设有第一驱动件,所述第一驱动件用于驱动所述齿环转动;
21.所述太阳能板安装框上下两内壁设有太阳能板拆装组件,所述太阳能板拆装组件用于所述太阳能板的安装;
22.所述太阳能板拆装组件包括拆装组件安装台,所述拆装组件安装台固定连接在所述太阳能板安装框内壁,所述拆装组件安装台上固定连接有u型安装台,所述u型安装台上转动连接有驱动齿轮,所述驱动齿轮上设有第二驱动件,所述第二驱动件用于驱动所述驱动齿轮转动,所述拆装组件安装台两侧均铰链连接有安装连杆,所述安装连杆远离所述拆装组件安装台的一端转动连接有滚轮,所述太阳能板上下两侧面开设有滚轮安装槽,所述滚轮安装槽用于与所述滚轮相互配合,所述安装连杆上沿安装连杆滑动连接有调节滑块,所述调节滑块上铰链连接有z型齿条,所述z型齿条远离所述调节滑块的一端与所述驱动齿轮相互啮合,所述拆装组件安装台上固定连接有齿条导向座,所述z型齿条滑动连接在所述
齿条导向座内,所述安装连杆与所述太阳能板安装框内壁之间固定连接有第一弹性件;
23.所述太阳能板安装框左右两侧内壁上设有清洁保养组件,所述清洁保养组件包括冲洗烘干组件和刷杆执行组件;
24.所述冲洗烘干组件包括冲洗烘干组件安装壳,所述冲洗烘干组件安装壳固定连接在所述太阳能板安装框侧壁上,所述冲洗烘干组件安装壳内固定连接有第一导杆,所述第一导杆上滑动连接有第一楔形块,所述第一楔形块上设有第三驱动件,所述第三驱动件用于驱动所述第一楔形块沿所述第一导杆滑动,所述冲洗烘干组件安装壳内固定连接有导板,所述导板上滑动连接有电动伸缩喷水枪和烘干风机,所述电动伸缩喷水枪和烘干风机一端固定连接在楔形块安装板上,所述楔形块安装板远离所述电动伸缩喷水枪和烘干风机的一侧固定连接有第二楔形块,所述第一楔形块与所述第二楔形块的斜面相互配合,所述电动伸缩喷水枪与外界水源相通;
25.所述刷杆执行组件包括第二导杆,所述第二导杆固定连接在所述冲洗烘干组件安装壳和所述太阳能板安装框内壁之间,所述第二导杆上滑动连接有啮合架,所述啮合架包括槽型架体和固定连接在所述槽型架体两端的u型架体,所述槽型架体内壁设有啮合齿,所述第二导杆上铰链连接有扇形啮合齿,所述扇形啮合齿上设有第四驱动件,所述第四驱动件用于驱动所述扇形啮合齿转动,所述扇形啮合齿与所述槽型架体上的啮合齿相互啮合,所述扇形啮合齿同轴键连接有保养液电动伸缩存储筒,所述保养液电动伸缩存储筒内设有保养液,且其内滑动连接有挤出滑块,所述保养液电动伸缩存储筒出液口轴线方向与太阳能板平面相互垂直,所述u型架体上铰链连接有第一电动伸缩杆,所述槽型架体上铰链连接有第二电动伸缩杆,所述第一电动伸缩杆远离所述u型架体的一端和所述第二电动伸缩杆远离所述槽型架体的一端铰链连接在电动伸缩刷体上,所述电动伸缩刷体两端可伸缩。
26.优选的,还包括:
27.传送带更换监测系统,所述传送带更换监测系统用于监测传送带的运行状态,并在所述传送带的运行状态不佳时进行报警提示:
28.第一力传感器,所述第一力传感器设置在所述传送带的主动轮上上用于检测所述传送带紧边的张力;
29.第二力传感器,所述第二力传感器设置在所述传送带的主动轮上上用于检测所述传送带松边的张力;
30.计时器,所述计时器设置在所述传送带上,用于检测所述传送带的工作总时长;
31.压力传感器,所述压力传感器设置在所述传送带上,用于检测所述传送带上的压力;
32.速度传感器,所述速度传感器设置在所述传送带上,用于检测所述传送带的线速度;
33.控制器,报警器,所述控制器与所述第一力传感器、所述第二力传感器、所述计时器、所述压力传感器、所述速度传感器和所述报警器电连接,所述控制器基于所述第一力传感器、所述第二力传感器、所述计时器、所述压力传感器和所述速度传感器控制所述报警器报警,包括以下步骤:
34.步骤一:基于所述第一力传感器、所述第二力传感器、所述计时器、所述压力传感器和所述速度传感器,计算所述传送带的实际运行状态系数:
[0035][0036]
其中,为所述传送带的实际运行状态系数,f
α
为第一力传感器的检测值,f
β
为第二力传感器的检测值,为所述传送带的拉伸刚度,s为所述传送带的截面积,lg为以10为底的对数,t为所述计时器的检测值,th为所述传送带的预设寿命,θ为所述传送带的包角,tanθ为θ的正切值,g为传送带的自重,n
α
为所述压力传感器的检测值,n0为所述传送带的预设承重,为所述速度传感器的最大值,为所述速度传感器的最小值,ω
max
为所述主动轮的预设最大基准角速度,ω
min
为所述主动轮的预设最小基准角速度,r为所述主动轮的半径;
[0037]
步骤二:基于步骤一和公式(2),计算传送带更换监测系统的实际报警系数:
[0038][0039]
其中,ε为传送带更换监测系统的实际报警系数,l为所述传送带的带长,为所述传送带的预设运行状态系数,γ为所述传送带的材料磨损系数,w为所述传送带的磨损功,e为自然数,取值为2.72;
[0040]
步骤三:所述控制器比较传送带更换监测系统的实际报警系数和传送带更换监测系统的预设报警系数,若传送带更换监测系统的实际报警系数大于传送带更换监测系统的预设报警系数,则所述报警器报警。
[0041]
3.有益效果
[0042]
采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
[0043]
(1)本发明的多探头并行识别的零能耗自动分类垃圾箱,通过光伏发电技术与多探头并行识别模式的结合,零能耗地对多个垃圾进行稳定高效分类,光伏供电子系统采用离网式光伏系统,可以完全独立给整个分类系统供电,无需外部电源,采用基于深度学习的多探头并行识别模式技术,实现零能耗下垃圾资源的自动、快速、高效分类,达到24小时无人值守自动垃圾分类,解决了现有垃圾箱分类困难、实用性差、能耗高的问题,通过离网型光伏发电系统供电,不受使用地域限制,可以广泛应用于居民区、学校、工厂、购物广场、旅游区等地方,在国家双碳目标背景下,本光伏智能垃圾分类系统为碳中和解决方案提供了一种积极而有益的示范;
[0044]
(2)本发明的多探头并行识别的零能耗自动分类垃圾箱,用金属框架构造箱体的基本骨架,在垃圾箱的一端安装太阳能板,利用太阳能发电储藏在蓄电系统,通过集中在箱体后半部分的电路为所有箱内用电设备进行完全供电,并且能够有余电留存保证垃圾箱阴雨天正常运行和为便民设施供电,前边在左上角设置垃圾投放口,使用者通过液晶显示屏控制开启升降闸板,之后将垃圾袋解开,再将垃圾倒入投放口,箱体另一侧的夜间照明灯感应周围亮度过低时,会自动亮起,同时在箱体的另一端设置有开合门,确保封闭性同时方便环卫工人倒取垃圾;
[0045]
(3)本发明的多探头并行识别的零能耗自动分类垃圾箱,传送带的上方设置有四
个液压舵机,液压舵机通过托轨与悬挂梁架滑动连接,在液压舵机的底部设置有一个可以进行旋转的机械推板,同时液压舵机的外侧设有摄像模组,通过摄像模组可以获取垃圾图像传输给终端,液压舵机配合机械推板根据识别结果,判断是否将垃圾推入当前子垃圾箱,这整个分类过程传送带持续传动,四个识别分类区域单独工作互不影响,确保垃圾分类的稳定高效;
[0046]
(4)本发明的多探头并行识别的零能耗自动分类垃圾箱,箱体内部设有四个子垃圾箱,分别为干垃圾箱、湿垃圾箱、有害垃圾箱和可回收垃圾箱,在四个子垃圾箱上方的安装配备有一组电源箱盖,源箱盖的底部则设置有红外线传感器和紫外线灭菌灯,当检测到垃圾满了就会将提示呈现在液晶显示屏上,而紫外线灭菌灯每天:2:00-4:00定时亮灭灭菌,在独立的湿垃圾箱内设有一组温度传感器,当温度高于18℃时,会在液晶显示屏上提示,并且单片机控制湿垃圾箱底部外表面的半导体制冷组件进行降温,抑制有机物腐化,减少异味;
[0047]
(5)本发明的多探头并行识别的零能耗自动分类垃圾箱,从投放口倒入的垃圾会落在分离转台上,通过分离转台配合旁边的金属扫板将垃圾逐一送入传送带上等待分类,在分离转台的中心表面设置有一个中心汇流槽,通过中心汇流槽可以将垃圾中的污水向下排入到储备两用电箱内部的水箱中,之后定期通过排污阀将内部的污水排出。
附图说明
[0048]
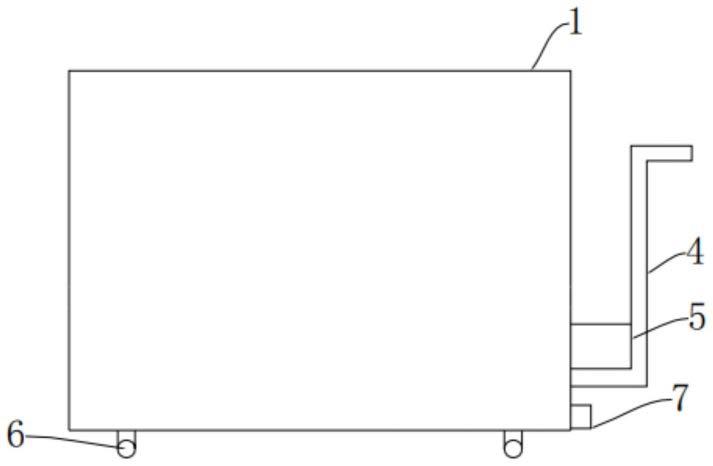
图1为本发明的整体主视图;
[0049]
图2为本发明的集水窗结构示意图;
[0050]
图3为本发明的悬挂梁架结构示意图;
[0051]
图4为本发明的机箱模组结构示意图;
[0052]
图5为本发明的阵列垃圾箱组结构示意图;
[0053]
图6为本发明的湿垃圾箱结构示意图;
[0054]
图7为本发明的电源箱盖结构示意图;
[0055]
图8为本发明的分离组件结构示意图;
[0056]
图9为本发明的多探头并行识别模式运行原理图;
[0057]
图10为本发明的系统运行具体流程;
[0058]
图11为本发明太阳能板安装位置示意图;
[0059]
图12为本发明太阳能板安装框结构示意图;
[0060]
图13为本发明太阳能板结构示意图;
[0061]
图14为本发明图11的a处局部放大图;
[0062]
图15为本发明太阳能板拆装组件结构示意图;
[0063]
图16为本发明图12的b处局部放大图;
[0064]
图17为本发明刷杆执行组件结构示意图。
[0065]
图中:1、金属框架;2、太阳能板;3、集水窗;4、垃圾投放口;5、升降闸板;6、悬挂梁架;7、分离组件;8、阵列垃圾箱组;9、电源箱盖;10、夜间照明灯;11、液晶显示屏;12、传送带;13、干垃圾箱;14、湿垃圾箱;15、有害垃圾箱;16、可回收垃圾箱;17、温度传感器;18、半导体制冷组件;301、闸窗;302、金属筛网;601、蓄水箱;602、液压舵机;603、电控托轨;604、
摄像模组;605、机械推板;606、度套轴;607、机箱模组;608、消防喷淋头;609、超声波驱虫仪;701、分离转台;702、金属扫板;703、中心汇流槽;704、旗轴;705、排污阀;706、储备两用电箱;901、上盖板;902、下盖板;903、紫外线灭菌灯;904、红外线传感器;10、太阳能板安装槽;100、安装孔;1000、齿环;1001、太阳能板安装框;1002、角度调节短轴;1003、角度调节齿轮;101、太阳能板拆装组件;1010、拆装组件安装台;1011、u型安装台;1012、驱动齿轮;1013、安装连杆;1014、滚轮;1015、滚轮安装槽;1016、调节滑块;1017、z型齿条;1018、齿条导向座;1019、第一弹性件;102、清洁保养组件;103、冲洗烘干组件;1030、冲洗烘干组件安装壳;1031、第一导杆;1032、第一楔形块;1033、导板;1034、电动伸缩喷水枪;1035、烘干风机;1036、楔形块安装板;1037、第二楔形块;104、刷杆执行组件;1040、第二导杆;1041、啮合架;1042、槽型架体;1043、u型架体;1044、扇形啮合齿;1045、保养液电动伸缩存储筒;1046、挤出滑块;1047、第一电动伸缩杆;1048、第二电动伸缩杆;1049、电动伸缩刷体。
具体实施方式
[0066]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0067]
为进一步了解本发明的内容,结合附图对本发明作详细描述
[0068]
请参阅图1,本发明提供的一种实施例:一种多探头并行识别的零能耗自动分类垃圾箱,包括金属框架1,金属框架1的一端设置有太阳能板2,且太阳能板2的内侧设置有蓄电池模块,金属框架1的顶部设置有集水窗3,且集水窗3与金属框架1通过螺钉连接,金属框架1外表面的一侧设置有垃圾投放口4,且垃圾投放口4的内部设置有升降闸板5,垃圾投放口4的一侧设置有液晶显示屏11,且液晶显示屏11与金属框架1通过螺钉连接,金属框架1外表面的另一侧设置有夜间照明灯10,且夜间照明灯10与金属框架1通过卡槽连接,用金属框架1构造箱体的基本骨架,在垃圾箱的一端安装太阳能板2,利用太阳能发电储藏在蓄电系统,通过集中在箱体后半部分的电路为所有箱内用电设备进行完全供电,并且能够有余电留存保证垃圾箱阴雨天正常运行和为便民设施供电,前边在左上角设置垃圾投放口4,使用者通过液晶显示屏11控制开启升降闸板5,之后将垃圾袋解开,再将垃圾倒入投放口,箱体另一侧的夜间照明灯10感应周围亮度过低时,会自动亮起,同时在箱体的另一端设置有开合门,确保封闭性同时方便环卫工人倒取垃圾。
[0069]
请参阅图2-4,集水窗3的外表面设置有闸窗301,且闸窗301的外表面设置有金属筛网302,集水窗3的下方设置有悬挂梁架6,且悬挂梁架6设置在金属框架1的内部,悬挂梁架6的下方设置有传送带12,且传送带12与金属框架1通过支架连接,悬挂梁架6的顶部设置有蓄水箱601,且蓄水箱601的顶部设置有单向阀嘴,悬挂梁架6的上部设置蓄水箱601,该蓄水箱601与箱体顶部的集水窗3相连,通过集水窗3可以在雨天收集雨水进行回收储存在蓄水箱601中,而悬挂梁架6的底部设置有机箱模组607,机箱模组607的表面连设置有四个消防喷淋头608,且与四个子垃圾箱一一对应,当箱内着火时,会立即响应喷水灭火,同时在机箱模组607的中心区域装有超声波驱虫仪609,可以用来驱赶虫鼠,悬挂梁架6的底部设置有电控托轨603,且电控托轨603有四个,电控托轨603的下方设置有液压舵机602,且液压舵机
602与电控托轨603滑动连接,液压舵机602的底部设置有机械推板605,且机械推板605通过角度套轴606与液压舵机602转动连接,液压舵机602的外侧设置有摄像模组604,且摄像模组604与液压舵机602组合连接,传送带12的上方设置有四个液压舵机602,液压舵机602通过托轨与悬挂梁架6滑动连接,在液压舵机602的底部设置有一个可以进行旋转的机械推板605,同时液压舵机602的外侧设有摄像模组604,通过摄像模组604可以获取垃圾图像传输给终端,液压舵机602配合机械推板605根据识别结果,判断是否将垃圾推入当前子垃圾箱,这整个分类过程传送带持续传动,四个识别分类区域单独工作互不影响,确保垃圾分类的稳定高效,电控托轨603之间设置有机箱模组607,且机箱模组607的内部设置有泵体和电机,机箱模组607的外表面设置有超声波驱虫仪609,且超声波驱虫仪609的四周均设置有消防喷淋头608。
[0070]
请参阅图,5-7,传送带12的一端设置有分离组件7,且分离组件7设置在垃圾投放口4的内侧,传送带12一侧的下方设置有阵列垃圾箱组8,且阵列垃圾箱组8有四个,阵列垃圾箱组8包括干垃圾箱13、湿垃圾箱14、有害垃圾箱15和可回收垃圾箱16,且干垃圾箱13、湿垃圾箱14、有害垃圾箱15和可回收垃圾箱16的顶部均设置有电源箱盖9,湿垃圾箱14内部的一侧设置有温度传感器17,且温度传感器17的型号设置为xh-t106,湿垃圾箱14的底部设置有半导体制冷组件18,且半导体制冷组件18与湿垃圾箱14通过螺钉连接,电源箱盖9包括上盖板901和下盖板902,且上盖板901与下盖板902通过转轴转动连接,下盖板902的底部设置有红外线传感器904,且红外线传感器904的型号设置为e3f-ds30f1,红外线传感器904的两侧均设置有紫外线灭菌灯903,且紫外线灭菌灯903与电源箱盖9电性连接,箱体内部设有四个子垃圾箱,分别为干垃圾箱13、湿垃圾箱14、有害垃圾箱15和可回收垃圾箱16,在四个子垃圾箱上方的安装配备有一组电源箱盖9,源箱盖9的底部则设置有红外线传感器904和紫外线灭菌灯903,当检测到垃圾满了就会将提示呈现在液晶显示屏上,而紫外线灭菌灯903每天2:00-4:00定时亮灭灭菌,在独立的湿垃圾箱14内设有一组温度传感器17,当温度高于18℃时,会在液晶显示屏上提示,并且单片机控制湿垃圾箱14底部外表面的半导体制冷组件18进行降温,抑制有机物腐化,减少异味。
[0071]
请参阅图8,分离组件7包括储备两用电箱706,且储备两用电箱706的内部设置有水箱,储备两用电箱706在实现供电驱动的同时,还可以通过内部的水箱来积蓄污水,储备两用电箱706底部的一侧设置有排污阀705,且排污阀705与储备两用电箱706通过法兰连接,储备两用电箱706的顶部设置有分离转台701,且分离转台701与储备两用电箱706转动连接,分离转台701的中心表面设置有中心汇流槽703,且中心汇流槽703的内部设置有滤网,分离转台701的一侧设置有金属扫板702,且金属扫板702通过旗轴704与储备两用电箱706转动连接,从投放口倒入的垃圾会落在分离转台701上,通过分离转台701配合旁边的金属扫板702将垃圾逐一送入传送带12上等待分类,在分离转台701的中心表面设置有一个中心汇流槽703,通过中心汇流槽703可以将垃圾中的污水向下排入到储备两用电箱706内部的水箱中,之后定期通过排污阀705将内部的污水排出。
[0072]
请参阅图9-10,在传送带12上方,部署有四个红外对管、四个摄像探头、四个舵机推板,它们由同一个树莓派多线程控制,红外对管
①
、探头a、舵机a为一组分类区间,红外对管
②
、探头b、舵机b为一组分类区间,依次类推。在同一组中,红外对管用作检测垃圾进入,探头拍照获取图像供神经网络模型分析识别,树莓派控制舵机根据识别结果,判断舵机推
板工作将垃圾推入垃圾桶,或不工作让垃圾进入下一组分类区间;
[0073]
经过垃圾分散子系统工作后,多个垃圾分散为单个垃圾依次进入传送带12,下面以一个垃圾的识别分类过程为例,展开详细描述:传送带12带动垃圾前进,来到第一个分类区间口,红外对管若未感应到障碍物时,保持程序初始化,当红外对管感应到障碍物,即垃圾开始进入图像获取区,感应障碍物消失后即垃圾完全进入图像获取区,红外对管的对射被挡住时,即向树莓派发送低电平信号,对射恢复即恢复高电平,一次完整的感应出现到消失即作为程序判断条件,当条件符合,停顿1s后,树莓派控制usb摄像头对下方区域进行拍照,树莓派搭载的卷积神经网络模型对图像进行分析识别;
[0074]
经实测选出网络复杂度低、计算消耗小的预训练模型i ncept ionv3,通过对模型的全连接、卷积、池化层整体结构进行优化,实现图像高精确度识别,最终部署在移动式设备树莓派端,当摄像头检测到垃圾时,获取垃圾图像,运行卷积神经网络,提取垃圾表面特征,进行匹配识别,依据识别结果控制舵机运动实现自动分类。
[0075]
同时,垃圾箱采取多探头并行识别模式,在第一组中仅判断垃圾是否为干垃圾,第二组仅判断垃圾是否为可回收垃圾,第三组仅判断垃圾是否为湿垃圾,第四组仅判断垃圾是否为有害垃圾,以此模式,加快分析识别速度,并且在垃圾依次进去分类区间时,各组能够同时独立工作互不影响。
[0076]
在一个实施例中,请参阅图11-17,所述金属框架1上开设有太阳能板安装槽10,所述太阳能板安装槽10内转动连接有太阳能板安装框1001,所述太阳能板安装框1001左右两侧固定连接有角度调节短轴1002,所述太阳能板安装槽10左右两侧面开设有安装孔100,所述角度调节短轴1002远离所述太阳能板安装框1001的一端转动连接在所述安装孔100内,且所述角度调节短轴1002上键连接有角度调节齿轮1003,所述安装孔100内转动连接有齿环1000,所述齿环1000与所述角度调节齿轮1003相互啮合,所述齿环1000上设有第一驱动件,所述第一驱动件用于驱动所述齿环1000转动;
[0077]
所述太阳能板安装框1001上下两内壁设有太阳能板拆装组件101,所述太阳能板拆装组件101用于所述太阳能板2的安装;
[0078]
所述太阳能板拆装组件101包括拆装组件安装台1010,所述拆装组件安装台1010固定连接在所述太阳能板安装框1001内壁,所述拆装组件安装台1010上固定连接有u型安装台1011,所述u型安装台1011上转动连接有驱动齿轮1012,所述驱动齿轮1012上设有第二驱动件,所述第二驱动件用于驱动所述驱动齿轮1012转动,所述拆装组件安装台1010两侧均铰链连接有安装连杆1013,所述安装连杆1013远离所述拆装组件安装台1010的一端转动连接有滚轮1014,所述太阳能板2上下两侧面开设有滚轮安装槽1015,所述滚轮安装槽1015用于与所述滚轮1014相互配合,所述安装连杆1013上沿安装连杆1013滑动连接有调节滑块1016,所述调节滑块1016上铰链连接有z型齿条1017,所述z型齿条1017远离所述调节滑块1016的一端与所述驱动齿轮1012相互啮合,所述拆装组件安装台1010上固定连接有齿条导向座1018,所述z型齿条1017滑动连接在所述齿条导向座1018内,所述安装连杆1013与所述太阳能板安装框1001内壁之间固定连接有第一弹性件1019;
[0079]
所述太阳能板安装框1001左右两侧内壁上设有清洁保养组件102,所述清洁保养组件102包括冲洗烘干组件103和刷杆执行组件104;
[0080]
所述冲洗烘干组件103包括冲洗烘干组件安装壳1030,所述冲洗烘干组件安装壳
1030固定连接在所述太阳能板安装框1001侧壁上,所述冲洗烘干组件安装壳1030内固定连接有第一导杆1031,所述第一导杆1031上滑动连接有第一楔形块1032,所述第一楔形块1032上设有第三驱动件,所述第三驱动件用于驱动所述第一楔形块1032沿所述第一导杆1031滑动,所述冲洗烘干组件安装壳1030内固定连接有导板1033,所述导板1033上滑动连接有电动伸缩喷水枪1034和烘干风机1035,所述电动伸缩喷水枪1034和烘干风机1035一端固定连接在楔形块安装板1036上,所述楔形块安装板1036远离所述电动伸缩喷水枪1034和烘干风机1035的一侧固定连接有第二楔形块1037,所述第一楔形块1032与所述第二楔形块1037的斜面相互配合,所述电动伸缩喷水枪1034与外界水源相通;
[0081]
所述刷杆执行组件104包括第二导杆1040,所述第二导杆1040固定连接在所述冲洗烘干组件安装壳1030和所述太阳能板安装框1001内壁之间,所述第二导杆1040上滑动连接有啮合架1041,所述啮合架1041包括槽型架体1042和固定连接在所述槽型架体1042两端的u型架体1043,所述槽型架体1042内壁设有啮合齿,所述第二导杆1040上铰链连接有扇形啮合齿1044,所述扇形啮合齿1044上设有第四驱动件,所述第四驱动件用于驱动所述扇形啮合齿1044转动,所述扇形啮合齿1044与所述槽型架体1042上的啮合齿相互啮合,所述扇形啮合齿1044同轴键连接有保养液电动伸缩存储筒1045,所述保养液电动伸缩存储筒1045内设有保养液,且其内滑动连接有挤出滑块1046,所述保养液电动伸缩存储筒1045出液口轴线方向与太阳能板2平面相互垂直,所述u型架体1043上铰链连接有第一电动伸缩杆1047,所述槽型架体1042上铰链连接有第二电动伸缩杆1048,所述第一电动伸缩杆1047远离所述u型架体1043的一端和所述第二电动伸缩杆1048远离所述槽型架体1042的一端铰链连接在电动伸缩刷体1049上,所述电动伸缩刷体1049两端可伸缩。
[0082]
上述实施例的工作原理及有益效果为:所述太阳能板安装时,所述第二驱动件驱动所述驱动齿轮1012转动,所述驱动齿轮1012转动带动z型齿条1017左右滑动,z型齿条1017左右滑动带动调节滑块1016沿安装连杆1013滑动,调节滑块1016沿安装连杆1013滑动带动安装连杆1013绕其与拆装组件安装台1010的铰链点转动,所述安装连杆1013转动的过程中将待安装的太阳能板放入所述太阳能板安装框1001内,最终滚轮1014与滚轮1014安装槽相互配合,太阳能板被夹装在所述太阳能板安装框1001内,所述太阳能板拆装组件101的设计可以适应任何尺寸的太阳能板,同时太阳能板采用可拆卸连接而不采用固定连接方便了太阳能板的检修和保养;
[0083]
当要调节太阳能板的光照角度时,第一驱动件驱动所述齿环1000转动,齿环1000转动带动角度调节齿轮1003转动,角度调节齿轮1003转动带动角度调节短轴1002转动,角度调节短轴1002转动带动太阳能板安装框1001翻转,太阳能板安装框1001翻转从而调节其上的太阳能板的光照角度,太阳能板光照角度的调节保证了其良好的光电转化率;
[0084]
当要清洁太阳能板时,第三驱动件驱动所述第一楔形块1032沿所述第一导杆1031滑动,使得所述第一楔形块1032推动所述第二楔形块1037运动,所述第二楔形块1037运动使得电动伸缩喷水枪1034向靠近太阳能板的方向伸出,之后所述电动伸缩喷水枪1034伸长向清洁太阳能板面板上喷水,同时所述第四驱动件驱动所述扇形啮合齿1044转动,所述扇形啮合齿1044转动在啮合齿的作用下带动啮合架1041沿第二导杆1040上下滑动,同时所述第一电动伸缩杆1047、所述第二电动伸缩杆1048伸长,使得电动伸缩刷体紧贴在太阳能板面板上,通过啮合架1041上下运动,同时改变第一电动伸缩杆1047和所述第二电动伸缩杆
1048的伸长长度,从而使得电动伸缩刷体在太阳能板面板上挥动,使得太阳能板面板被清洁,清洁完毕后所述烘干风机1035对太阳能板进行快速烘干,避免外界灰尘粘黏在太阳能板上;
[0085]
当对太阳能板进行保养时,第四驱动件驱动所述扇形啮合齿1044快速转动,扇形啮合齿1044快速转动带动保养液电动伸缩存储筒1045快速甩动,使得其内的挤出滑块1046沿保养液电动伸缩存储筒1045内壁滑动,从而将保养液挤出至太阳能板上,所述扇形啮合齿1044转动在啮合齿的作用下带动啮合架1041沿第二导杆1040上下滑动,同时所述第一电动伸缩杆1047、所述第二电动伸缩杆1048伸长,使得电动伸缩刷体紧贴在太阳能板面板上,通过啮合架1041上下运动,同时改变第一电动伸缩杆1047和所述第二电动伸缩杆1048的伸长长度,从而使得电动伸缩刷体在太阳能板面板上挥动,使得太阳能板面板上的保养液被均匀涂抹,所述保养液电动伸缩存储筒1045的设计延长了太阳能板的使用寿命。
[0086]
在一个实施例中,还包括:
[0087]
传送带更换监测系统,所述传送带更换监测系统用于监测传送带12的运行状态,并在所述传送带12的运行状态不佳时进行报警提示:
[0088]
第一力传感器,所述第一力传感器设置在所述传送带12的主动轮上上用于检测所述传送带12紧边的张力(所述传送带12进入主动轮的一边的张力);
[0089]
第二力传感器,所述第二力传感器设置在所述传送带12的主动轮上上用于检测所述传送带12松边的张力(所述传送带12转出主动轮的一边的张力);
[0090]
计时器,所述计时器设置在所述传送带12上,用于检测所述传送带12的工作总时长;
[0091]
压力传感器,所述压力传感器设置在所述传送带12上,用于检测所述传送带12上的压力;
[0092]
速度传感器,所述速度传感器设置在所述传送带12上,用于检测所述传送带12的线速度;
[0093]
控制器,报警器,所述控制器与所述第一力传感器、所述第二力传感器、所述计时器、所述压力传感器、所述速度传感器和所述报警器电连接,所述控制器基于所述第一力传感器、所述第二力传感器、所述计时器、所述压力传感器和所述速度传感器控制所述报警器报警,包括以下步骤:
[0094]
步骤一:基于所述第一力传感器、所述第二力传感器、所述计时器、所述压力传感器和所述速度传感器,计算所述传送带12的实际运行状态系数:
[0095][0096]
其中,为所述传送带12的实际运行状态系数,f
α
为第一力传感器的检测值,f
β
为第二力传感器的检测值,为所述传送带12的拉伸刚度,s为所述传送带12的截面积,lg为以10为底的对数,t为所述计时器的检测值,th为所述传送带12的预设寿命,θ为所述传送带12的包角,tanθ为θ的正切值,g为传送带12的自重,n
α
为所述压力传感器的检测值,n0为所述传送带12的预设承重,为所述速度传感器的最大值,为所述速度传感器的最小
值,ω
max
为所述主动轮的预设最大基准角速度,ω
min
为所述主动轮的预设最小基准角速度,r为所述主动轮的半径;
[0097]
步骤二:基于步骤一和公式(2),计算传送带更换监测系统的实际报警系数:
[0098][0099]
其中,ε为传送带更换监测系统的实际报警系数,l为所述传送带12的带长,为所述传送带12的预设运行状态系数,γ为所述传送带12的材料磨损系数,w为所述传送带12的磨损功,e为自然数,取值为2.72;
[0100]
步骤三:所述控制器比较传送带更换监测系统的实际报警系数和传送带更换监测系统的预设报警系数,若传送带更换监测系统的实际报警系数大于传送带更换监测系统的预设报警系数,则所述报警器报警。
[0101]
上述实施例的工作原理及有益效果为:先基于所述第一力传感器、所述第二力传感器、所述计时器、所述压力传感器和所述速度传感器,计算所述传送带12的实际运行状态系数,所述传送带12的工作总时长t越大,所述传送带12上的压力n
α
越大,所述传送带12的线速度越大,传送带12的实际运行状态系数越大,传送带12的实际运行状态系数越大传送带12的工作状态越差,之后计算传送带更换监测系统的实际报警系数,再计算传送带更换监测系统的实际报警系数时引入传送带12工作过程中传送带12磨损的参数γ*w,考虑到磨损对传送带12运行的影响,使得计算结果更为准确,所述传送带12紧边的张力和所述传送带12松边的张力之差|f
α-f
β
|越大,所述传送带12的工作总时长t越大,所述传送带12的线速度越大,传送带更换监测系统的实际报警系数越大,传送带12越需要更换维修,传送带更换监测系统的设计保证了传送带12的及时更换和维修,避免了因传送带12工作异常导致自动分类垃圾箱不能正常运行。
[0102]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0103]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。