1.本实用新型涉及水泥作业技术领域,尤其是涉及一种水泥散装对正装置。
背景技术:
2.由于国家对环保的要求越来越高,散装水泥在水泥行业中的占比逐年递增。而散装水泥行业现有设备已经不能满足行业发展的要求了,现有技术中,散装机中的散装头仅仅具有升降功能,这样就造成了散装机上的散装头与散装车上的灌口对正困难的问题,是困扰了水泥厂和司机的一个大问题,装载困难,很大程度上影响了灌装速度。
技术实现要素:
3.本实用新型的目的是提供一种水泥散装对正装置,可以精准快速调整散装头的位置,解决了散装头与散装车的灌口对正困难的问题。
4.为实现上述目的,本实用新型提供了一种水泥散装对正装置,包括工控机、第一升降机构、散装头、调节连接架、第一转动机构、第二转动机构、第二升降机构以及图像定位机构,第一转动机构、第二转动机构、第二升降机构、图像定位机构以及第一升降机构均与所述工控机电连接,所述图像定位机构的摄像机与装载工位相对设置;
5.所述第二升降机构与所述第二转动机构相连接,所述第二转动机构与所述第一转动机构相连接,所述第一转动机构与所述调节连接架相连接,所述调节连接架与所述散装头相连接,所述散装头与所述第一升降机构相连接。
6.优选的,所述第一升降机构为卷扬机,所述卷扬机的钢丝绳与散装头固定连接。
7.优选的,所述调节连接架包括调节滑轨和u型连接板,两个调节滑轨底部与所述散装头固定连接,所述调节滑轨内设置有滑块,所述滑块与u型连接板固定连接。
8.优选的,所述第一转动机构包括第一转轴和第一转动电机,所述第一转轴一端与所述u型连接板固定连接,所述第一转轴另一端与所述第一转动电机固定连接。
9.优选的,所述第二转动机构包括转臂、第二转轴以及第二转动电机,所述第二转动电机与所述第二转轴固定连接,所述第二转轴与所述转臂一端固定连接,所述第一转动电机固定于所述转臂的另一端。
10.优选的,所述第二转动电机通过滑板固定于第二升降机构上,所述第二升降机构为升降滑台。
11.一种水泥散装对正方法,具体步骤如下:
12.步骤s1:工业摄像机实时捕捉车辆进料口,车辆口进入监控的采集范围内进行图像捕捉;
13.步骤s2:对捕捉的图像进行图像处理,计算出车辆进料口的成像坐标;
14.步骤s3:工控机控制卷扬机和升降滑台同时运行,使得散装头下降到达设定高度;
15.步骤s4:通过成像坐标计算出转臂角度和第一转动电机角度,进行角度旋转,使得散装头与灌装口对正;
16.步骤s5:工控机控制卷扬机运行,使得散装头与灌装口对接填料;
17.步骤s6:填料完毕后,工控机控制卷扬机、第一转动电机、第二转动电机以及升降滑台使得散装头回到初始位置。
18.进一步的,在步骤s2中所述图像处理具体步骤为:
19.进行图像二值化,采用迭代方式逼近合理阈值,进行轮廓查找,找出成像中与散装头最接近的轮廓,描绘轮廓进行坐标记录,计算出车辆进料口的成像位置,得出散装头的成像坐标。
20.进一步的,在步骤s4中,
21.成像坐标与转臂角度和第一转动电机角度的计算公式如下:
[0022][0023]
其中,相机坐标系空间某点mc(xc,yc,zc),相机坐标系空间某点mw (xw,yw,zw),r为3x3正交单位矩阵,t为三维平移向量,求出外参后,根据外参计算转臂角度和第一转动电机角度。
[0024]
进一步的,在步骤s6中,具体步骤为,
[0025]
步骤s61:卷扬机反向转动将散装头升到设定高度;
[0026]
步骤s62:第二转动电机和第一转动电机转动使得散装头回到初始位置角度;
[0027]
步骤s63:卷扬机和升降滑台升至最高点,散装头回到初始位置。
[0028]
因此,本实用新型采用上述结构的一种水泥散装对正装置,通过视觉定位机构进行图像采集以及数据计算,工控机发送控制指令到第一转动机构、第二转动机构、第一升降机构以及第二升降机构中对散装头进行位置调整,且四个机构可以同时进行,大大提高了调整效率,解决了散装头与散装车的灌口对正困难的问题。
[0029]
下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
附图说明
[0030]
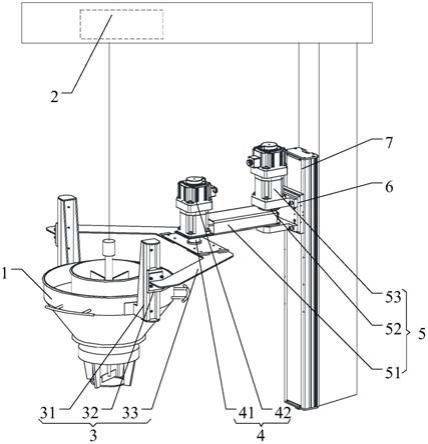
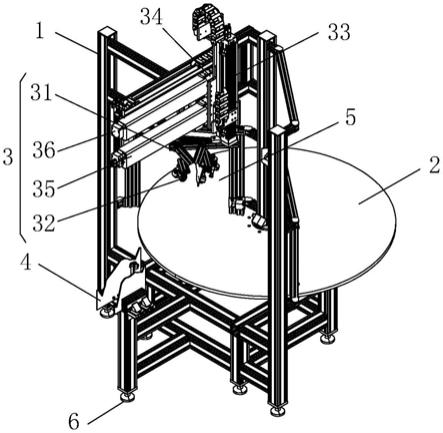
图1为本实用新型一种水泥散装对正装置结构示意图;
[0031]
图2为本实用新型一种水泥散装对正装置控制原理图。
[0032]
附图标记
[0033]
1、散装头;2、卷扬机;3、调节连接架;31、调节滑轨;32、滑块;33、 u型连接板;4、第一转动机构;41、第一转动电机;42、第一转轴;5、第二转动机构;51、转臂;52、第二转轴;53、第二转动电机;6、滑板;7、升降滑台。
具体实施方式
[0034]
实施例
[0035]
图1为本实用新型一种水泥散装对正装置结构示意图,如图所示,一种水泥散装对正装置包括工控机、第一升降机构、散装头1、调节连接架3、第一转动机构4、第二转动机构5、第二升降机构以及图像定位机构,第一转动机构4、第二转动机构5、第二升降机构、图像
定位机构以及第一升降机构均与工控机电连接,如图2所示,图2为本实用新型一种水泥散装对正装置控制原理图,图像定位机构的摄像机与装载工位相对设置,用于采集装载车的图像信息。工控机控制电机和升降机构属于现有技术,在此不再详细叙述其具体电路和型号。
[0036]
本实施例第一升降机构为卷扬机2,卷扬机2的钢丝绳与散装头1固定连接。调节连接架3包括调节滑轨31和u型连接板33,两个调节滑轨31底部与散装头1固定连接,调节滑轨31内设置有滑块32,滑块32与u型连接板 33固定连接,第二转动电机53通过滑板6固定于第二升降机构上,本实施例第二升降机构为升降滑台7,升降滑台7的升降运动与卷扬机2的升降运动同步,使得在调整升降过程中滑块32在调节滑轨31移动,保证散装头直接升降,减少晃动,同时通过调节滑轨31纠正同步偏差。
[0037]
第一转动机构4包括第一转轴42和第一转动电机41,第一转轴42一端与u型连接板33固定连接,第一转轴42另一端与第一转动电机41固定连接。第一转动机构4用于控制散装头1进行一定角度的水平移动。同时第二转动机构5包括转臂51、第二转轴52以及第二转动电机53,第二转动电机53与第二转轴52固定连接,第二转轴52与转臂51一端固定连接,第一转动电机 41固定于转臂51的另一端。实现第一转动机构4进行一定角度的水平移动,两级转动可以同时进行。
[0038]
一种水泥散装对正方法,具体步骤如下:
[0039]
步骤s1:工业摄像机实时捕捉车辆进料口,车辆口进入监控的采集范围内进行图像捕捉。
[0040]
步骤s2:对捕捉的图像进行图像处理,计算出车辆进料口的成像坐标。
[0041]
所述图像处理具体步骤如下:
[0042]
进行图像二值化,
[0043]
thresh_binary:过门限的值设置为maxval,其它值置零
[0044][0045]
由于光线问题,采用迭代方式逼近合理阈值,迭代原理如下:
[0046]
设r是f(x)=0的根,选取x0作为r初始近似值,过点(x0,f(x0))做曲线y=f(x)的切线l,l的方程为y=f(x0) f'(x0)(x
‑
x0),求出l与x轴交点的横坐标x1=x0
‑
f(x0)/f'(x0),称x1为r的一次近似值。过点 (x1,f(x1))做曲线y=f(x)的切线,并求该切线与x轴的横坐标x2= x1
‑
f(x1)/f'(x1),称x2为r的二次近似值。得到最合理阈值,然后进行轮廓查找,找出成像中与散装头最接近的轮廓,描绘轮廓进行坐标记录,计算出车辆进料口的成像位置,得出散装头的成像坐标。
[0047]
步骤s3:工控机控制卷扬机和升降滑台同时运行,使得散装头下降到达设定高度。等待角度调整。
[0048]
步骤s4:通过成像坐标计算出转臂角度和第一转动电机角度,进行角度旋转,使得散装头与灌装口对正。
[0049]
成像坐标与转臂角度和第一转动电机角度的计算公式如下:
[0050][0051]
其中,相机坐标系空间某点mc(xc,yc,zc),相机坐标系空间某点mw (xw,yw,zw),r为3x3正交单位矩阵,t为三维平移向量,求出外参后,根据外参计算转臂角度和第一转动电机角度。
[0052]
步骤s5:工控机控制卷扬机运行,使得散装头与灌装口对接填料;
[0053]
步骤s6:填料完毕后,工控机控制卷扬机、第一转动电机、第二转动电机以及升降滑台使得散装头回到初始位置。
[0054]
步骤s6具体步骤为,
[0055]
步骤s61:卷扬机反向转动将散装头升到设定高度;
[0056]
步骤s62:第二转动电机和第一转动电机转动使得散装头回到初始位置角度;
[0057]
步骤s63:卷扬机和升降滑台升至最高点,散装头回到初始位置。
[0058]
因此,本实用新型采用上述结构的一种水泥散装对正装置及其对正方法,可以精准快速调整散装头的位置,解决了散装头与散装车的灌口对正困难的问题。
[0059]
最后应说明的是:以上实施例仅用以说明本实用新型的技术方案而非对其进行限制,尽管参照较佳实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本实用新型的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本实用新型技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。